Configuración de VEX AIM para el modo de estación Wi-Fi#
En lugar de transmitir su propia red, el robot también puede conectarse a una red Wi-Fi existente (Modo Estación). Esta página explica cómo ingresar las credenciales de Wi-Fi, encontrar la dirección IP asignada al robot y actualizar su espacio de trabajo para que coincida.
1. Access the AIM Setup Dashboard#
En un navegador web, ingrese la dirección IP del robot desde el menú Información del punto de acceso.

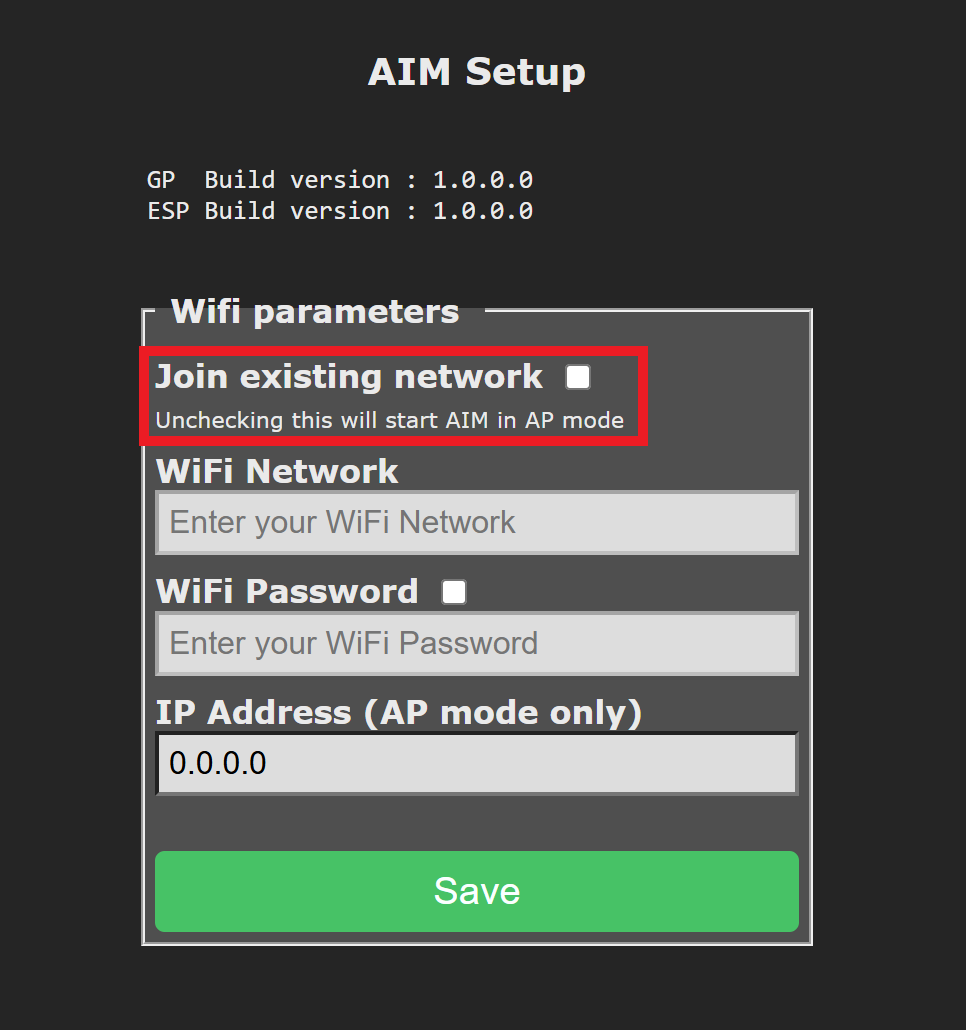
2. Enable Station Mode#
Marque la casilla Unirse a la red existente.
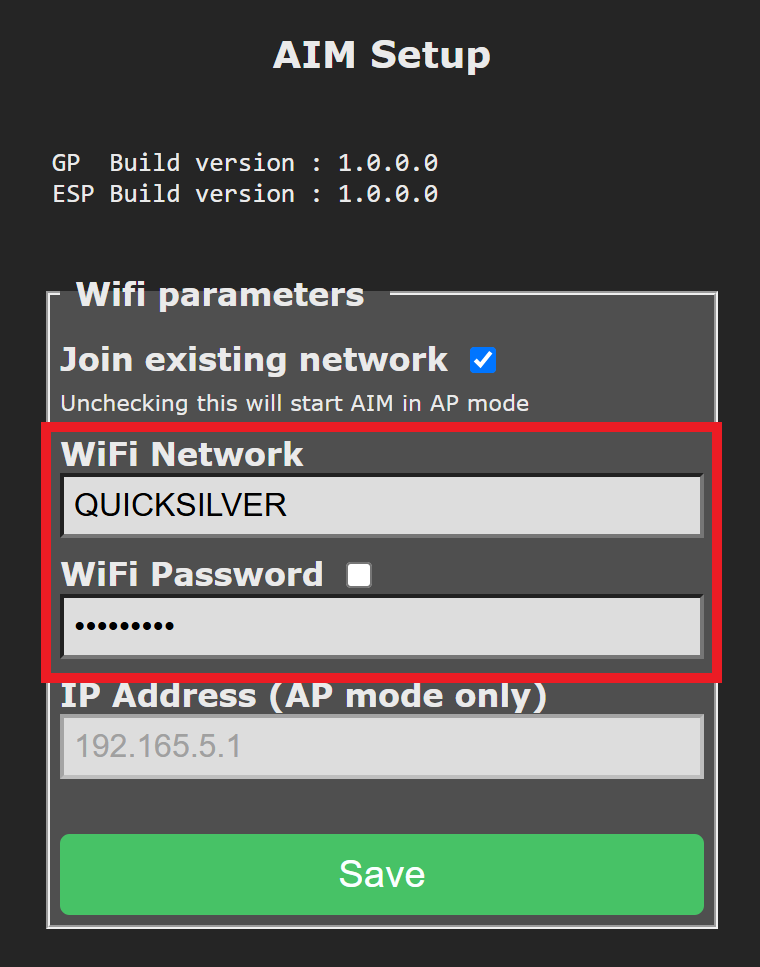
3. Enter the Network Information#
Introduce el SSID y la contraseña de la red Wi-Fi de destino. Cada campo admite un máximo de 20 caracteres.
Nota: No se admiten direcciones IP estáticas. El robot utiliza DHCP para obtener su configuración de red. Dado que el SSID y la contraseña se almacenan directamente en el robot, VEX recomienda configurar una red Wi-Fi dedicada para AIM en entornos donde se compartirá el dispositivo. Esto ayuda a evitar problemas de conexión causados por credenciales sobrescritas o conflictivas.
Después de seleccionar Guardar, el robot saldrá del modo AP y cambiará al modo estación, uniéndose a la red especificada.
4. Find the Robot’s Assigned IP Address#
Una vez conectado a la red, presione el ícono Estación para ver las diferentes direcciones IP asignadas al robot por el enrutador.

5. Clone the WebSocket Repository#
La biblioteca de cliente WebSocket utilizada para comunicarse con el robot de codificación VEX AIM está disponible en GitHub.
Para comenzar, clone el repositorio y ábralo en su editor o IDE de Python preferido (por ejemplo, VS Code, PyCharm o un editor basado en terminal como Vim).
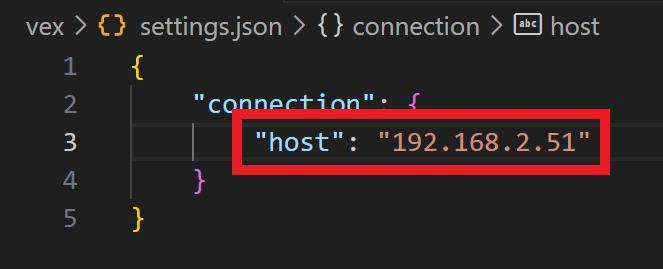
6. Save the Assigned IP Address#
Open the settings.json file located in the vex folder. Update the host field with the assigned IP Address in Station Mode.
Ahora puede continuar con la configuración de su entorno virtual de Python si aún no lo ha hecho.