Cambiar la dirección IP de VEX AIM en modo de punto de acceso#
Una vez que el robot esté en modo Punto de Acceso (PA), opcionalmente puede asignarle una dirección IP personalizada si es necesario. Esto facilita y hace más consistente la reconexión, especialmente en entornos con varios robots o redes compartidas. Esta página explica cómo configurar la dirección IP del robot en modo PA y actualizar su espacio de trabajo para que coincida.
1. Access the AIM Setup Dashboard#
En un navegador web, ingrese la dirección IP del robot desde el menú Información del punto de acceso.

2. Update the IP Address#
Actualice manualmente la dirección IP editando el campo Dirección IP (solo modo AP) y seleccionando Guardar para aplicar los cambios.
La pantalla/_static/img/Websocket/IP_Address_change.pngconfiguración de AIM muestra los números de versión en la parte superior e incluye una sección titulada “Parámetros WiFi”. El campo “Dirección IP (solo modo AP)” está resaltado y contiene la dirección 192.165.5.1.
Nota: Deje la opción Unirse a la red existente sin marcar.
3. Clone the WebSocket Repository#
La biblioteca de cliente WebSocket utilizada para comunicarse con el robot de codificación VEX AIM está disponible en GitHub.
Para comenzar, clone el repositorio y ábralo en su editor o IDE de Python preferido (por ejemplo, VS Code, PyCharm o un editor basado en terminal como Vim).
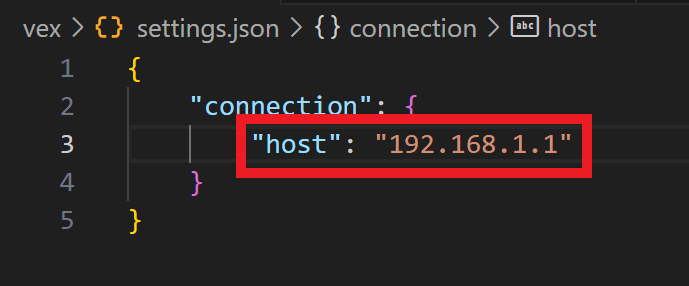
4. Save the Configured IP Address#
Open the settings.json file located in the vex folder. Update the host field with the IP Address assigned in Station Mode.
Ahora puede continuar con la configuración de su entorno virtual de Python si aún no lo ha hecho.