Servo Motor#
Introduction#
The VEX 3-Wire Servo Motor is a 3-wire device that can rotate to a specific position based on a control signal from the V5 Brain.

This page uses servo_motor as the example Servo Motor name. Replace it with your own configured name as needed.
Below is a list of available methods:
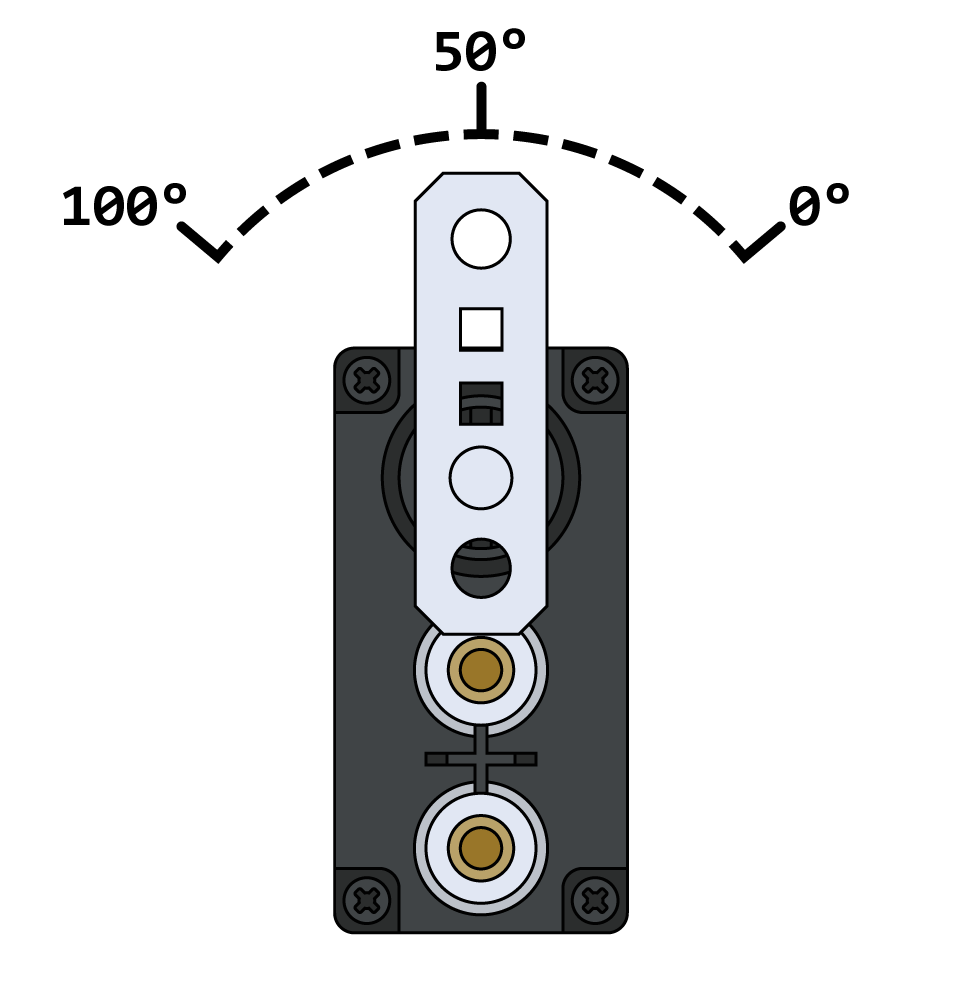
set_position– Moves a Servo Motor to a specified position between 0 and 100 degrees.
Constructor – Manually initialize a Servo Motor.
Servo– Creates a Servo Motor.
set_position#
set_position moves a Servo Motor to a specified position between 0 and 100 degrees.
Note: A Servo Motor begins each project by automatically centering itself at 50 degrees before completing any movements.
Usage:
servo_motor.set_position(value, units)
Parameters |
Description |
|---|---|
|
The position value to set for the Servo Motor. This can be an |
|
The position unit: |
Constructors#
Constructors are used to manually create Servo objects, which are necessary for configuring a Servo Motor outside of VEXcode.
Servo#
Servo creates a Servo Motor.
Usage:
Servo(port)
Parameter |
Description |
|---|---|
|
The 3-Wire Port that the Servo Motor is connected to:
|
# Create a Servo Motor in Port A
servo_motor = Servo(brain.three_wire_port.a)