Servomotor#
Introducción#
El servomotor de 3 cables VEX es un dispositivo de 3 cables que puede girar a una posición específica según una señal de control del cerebro V5.

This page uses servo_motor as the example Servo Motor name. Replace it with your own configured name as needed.
A continuación se muestra una lista de los métodos disponibles:
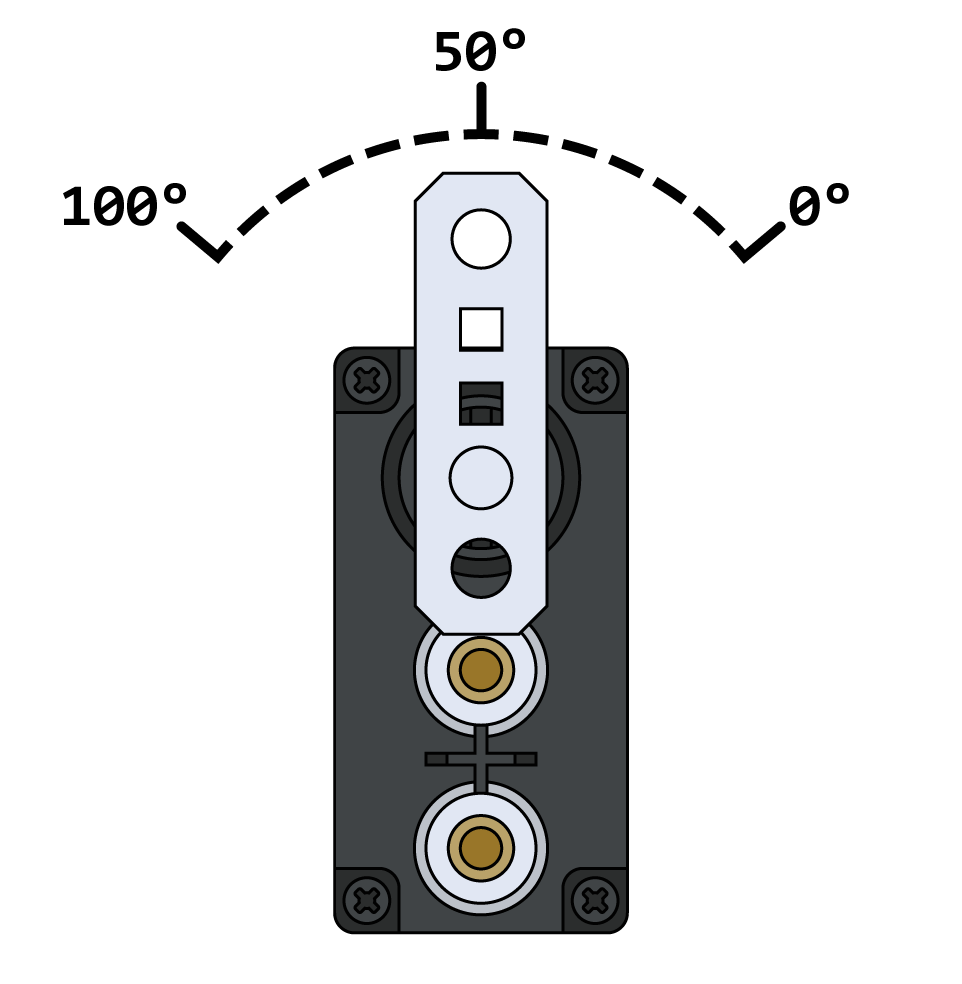
set_position– Moves a Servo Motor to a specified position between 0 and 100 degrees.
Constructor – Inicializa manualmente un servomotor.
Servo– Creates a Servo Motor.
establecer_posición#
set_position moves a Servo Motor to a specified position between 0 and 100 degrees.
Nota: Un servomotor comienza cada proyecto centrándose automáticamente a 50 grados antes de completar cualquier movimiento.
Usage:
servo_motor.set_position(value, units)
Parámetros |
Descripción |
|---|---|
|
The position value to set for the Servo Motor. This can be an |
|
The position unit: |
Constructores#
Constructors are used to manually create Servo objects, which are necessary for configuring a Servo Motor outside of VEXcode.
Servo#
Servo creates a Servo Motor.
Usage:
Servo(port)
Parámetro |
Descripción |
|---|---|
|
The 3-Wire Port that the Servo Motor is connected to:
|
# Create a Servo Motor in Port A
servo_motor = Servo(brain.three_wire_port.a)