AI Vision#
Introduction#
The VEX AIM Coding Robot’s AI Vision Sensor detects and tracks objects, colors, and AprilTag IDs. This allows the robot to analyze its surroundings, follow objects, and react based on detected visual data.
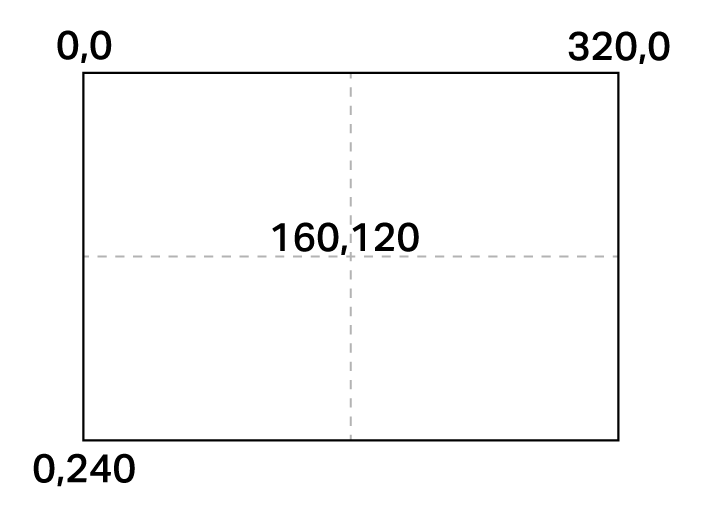
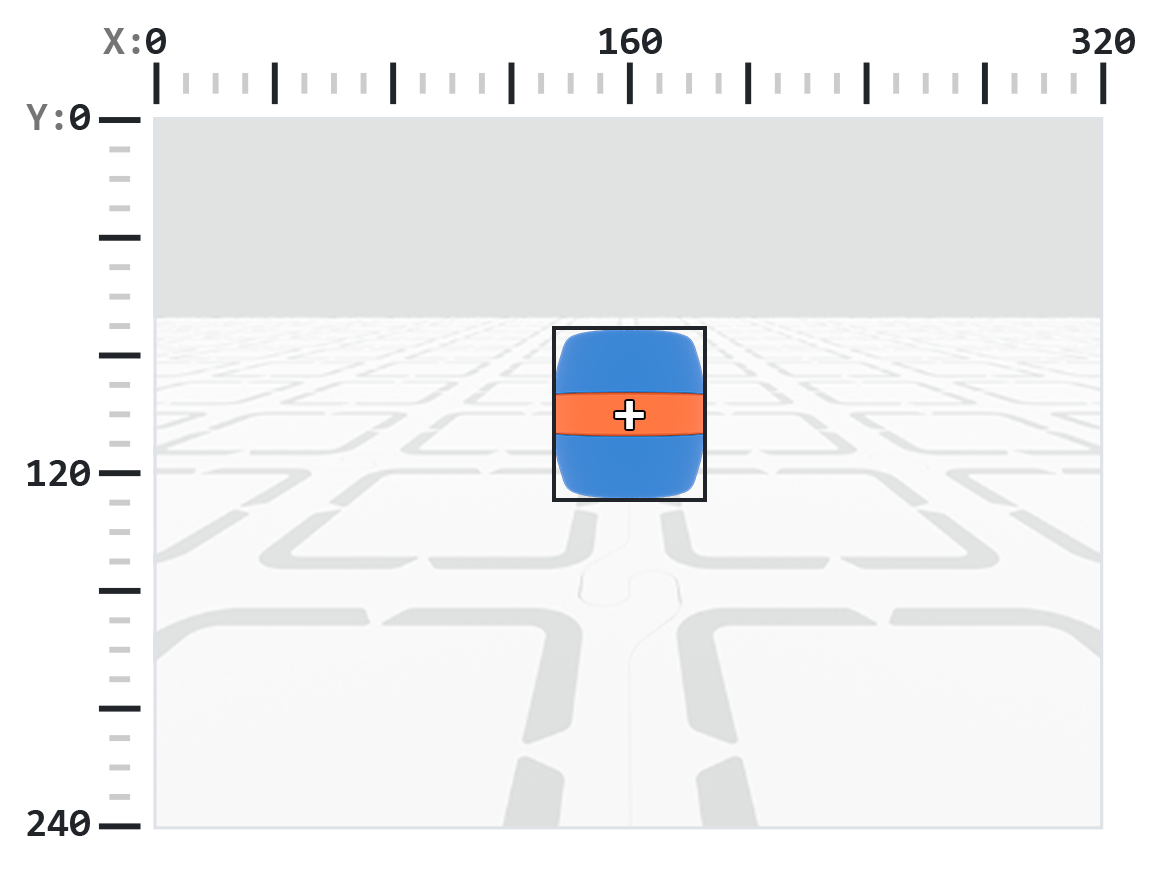
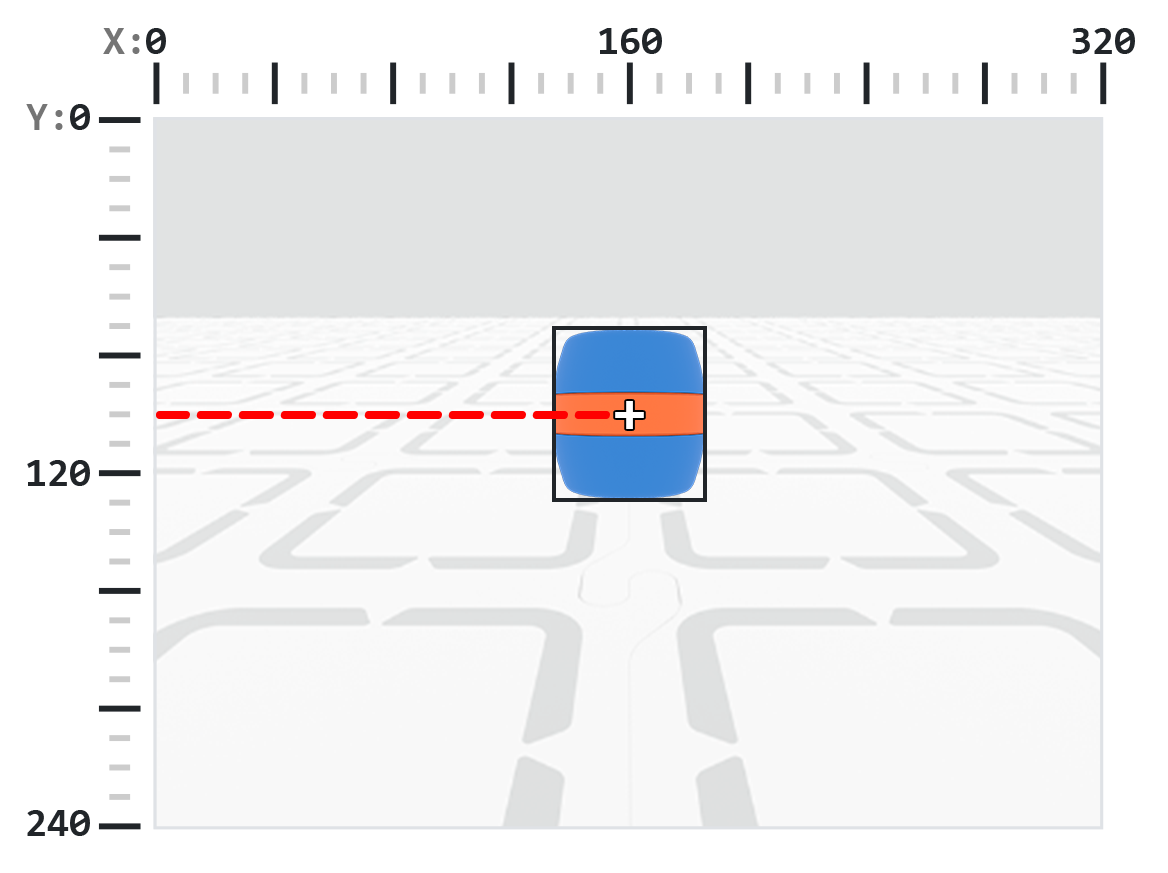
The AI Vision Sensor has a resolution of 320×240 pixels. The origin (0, 0) is located in the top-left corner, placing the center of the sensor at (160, 120), as shown in the diagram below:
Below is a list of all methods and properties:
Actions — Show or hide the AI Vision camera feed.
show_aivision— Displays the AI Vision feed on the robot’s screen.hide_aivision— Hides the AI Vision feed from the screen.tag_detection— Turns AprilTag ID detection on or off.
Getters — Detect if the robot is holding an object.
get_data— Returns a tuple of detected objects for a specific signature.has_sports_ball— Returns whether the robot has a sports ball.has_any_barrel— Returns whether the robot has any type of barrel.has_blue_barrel— Returns whether the robot has a blue barrel.has_orange_barrel— Returns whether the robot has an orange barrel.
Properties — Object data returned from get_data.
exists— Whether the object exists in the current detection as a Boolean.width— Width of the detected object.height— Height of the detected object.centerX— X position of the object’s center.centerY— Y position of the object’s center.bearing— Horizontal angle relative to the front of the robot.rotation— Orientation of the object.originX— X position of the object’s top-left corner.originY— Y position of the object’s top-left corner.id— Classification or tag ID of the object.score— Confidence score for AI Classifications.type— Returns the object’s type (AI, Tag, Color, or Code).
Constructors — Define color signatures and codes.
Create a Color Signature — Creates a new Color Signature based on RGB and hue/saturation ranges.
Create a Color Code — Combines multiple Color Signatures into a single Color Code.
Actions#
show_aivision#
show_aivision displays the AI Vision Sensor’s live data feed on the robot’s screen. The live data feed will cover any other images or text on the screen.
Note: The screen will not display any other images or text unless hide_aivision is used to hide the feed.
Usage:
robot.screen.show_aivision()
Parameters |
Description |
|---|---|
This method has no parameters. |
# Watch the AI Vision Sensor detect AI Classifications
# and AprilTag IDs as you move the robot
robot.screen.show_aivision()
hide_aivision#
hide_aivision removes the AI Vision Sensor’s live data feed from the robot’s screen.
Usage:
robot.screen.hide_aivision()
Parameters |
Description |
|---|---|
This method has no parameters. |
# View the AI Vision Sensor's feed for five seconds
robot.screen.show_aivision()
wait(5, SECONDS)
robot.screen.hide_aivision()
tag_detection#
tag_detection enables or disables the AprilTag ID detection, where the state is a Boolean value.
The sensor can detect AprilTag IDs 0 to 36 from the Circle21h7 family.
Usage:
robot.vision.tag_detection(state)
Parameters |
Description |
|---|---|
|
Values are: |
robot.screen.set_font(PROP30)
# Cut off AprilTag ID detection after 5 seconds
while True:
if timer.time(SECONDS) > 5:
robot.vision.tag_detection(False)
robot.screen.clear_screen()
robot.screen.set_cursor(3, 1)
apriltags = robot.vision.get_data(ALL_TAGS)
if apriltags[0].exists:
robot.screen.print("AprilTag ID detected!")
else:
robot.screen.print("Nothing detected!")
wait(0.1, SECONDS)
Getters#
get_data#
get_data filters data from the AI Vision Sensor frame to a single signature — a saved description of something the sensor can recognize, such as a pre-trained object, an AprilTag ID, or a configured Color Signature or Color Code — and returns a tuple.
Color Signatures and Color Codes must be configured first in the AI Vision Utility before they can be used with this method.
The tuple stores objects ordered from largest to smallest by width, starting at index 0. Each object’s properties can be accessed using its index. An empty tuple is returned if no matching objects are detected.
Usage:
robot.vision.get_data(signature, count)
Parameters |
Description |
|---|---|
|
Filters the dataset to only include data of the given signature. Available signatures are:
|
|
Optional. Sets the maximum number of objects that can be returned from 1 to 24 (default: 8). |
Note: AprilTag IDs 5 through 37 can be obtained by using the printed AprilTag IDs from AIM Printables.
# Move forward if a sports ball is detected
while True:
ball = robot.vision.get_data(SPORTS_BALL)
if ball[0].exists:
robot.move_for(10, 0)
wait(50, MSEC)
Viewing Data#
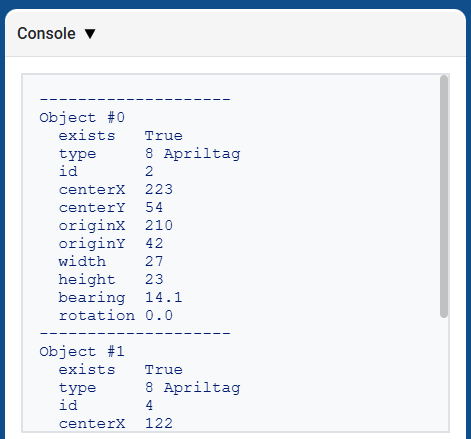
Printing the tuple returned by get_data displays a list of all properties of all detected objects:
# Display properties of all detected AprilTag IDs
while True:
vision_data = robot.vision.get_data(ALL_TAGS)
if vision_data[0].exists:
break
wait(0.25, SECONDS)
print(vision_data)
AI Classifications#
The AIM AI Vision Sensor can detect these AI Classifications:
ID Number |
AI Classification |
Signature |
|---|---|---|
0 |
Ball |
|
1 |
Blue Barrel |
|
2 |
Orange Barrel |
|
3 |
AIM Robot |
|
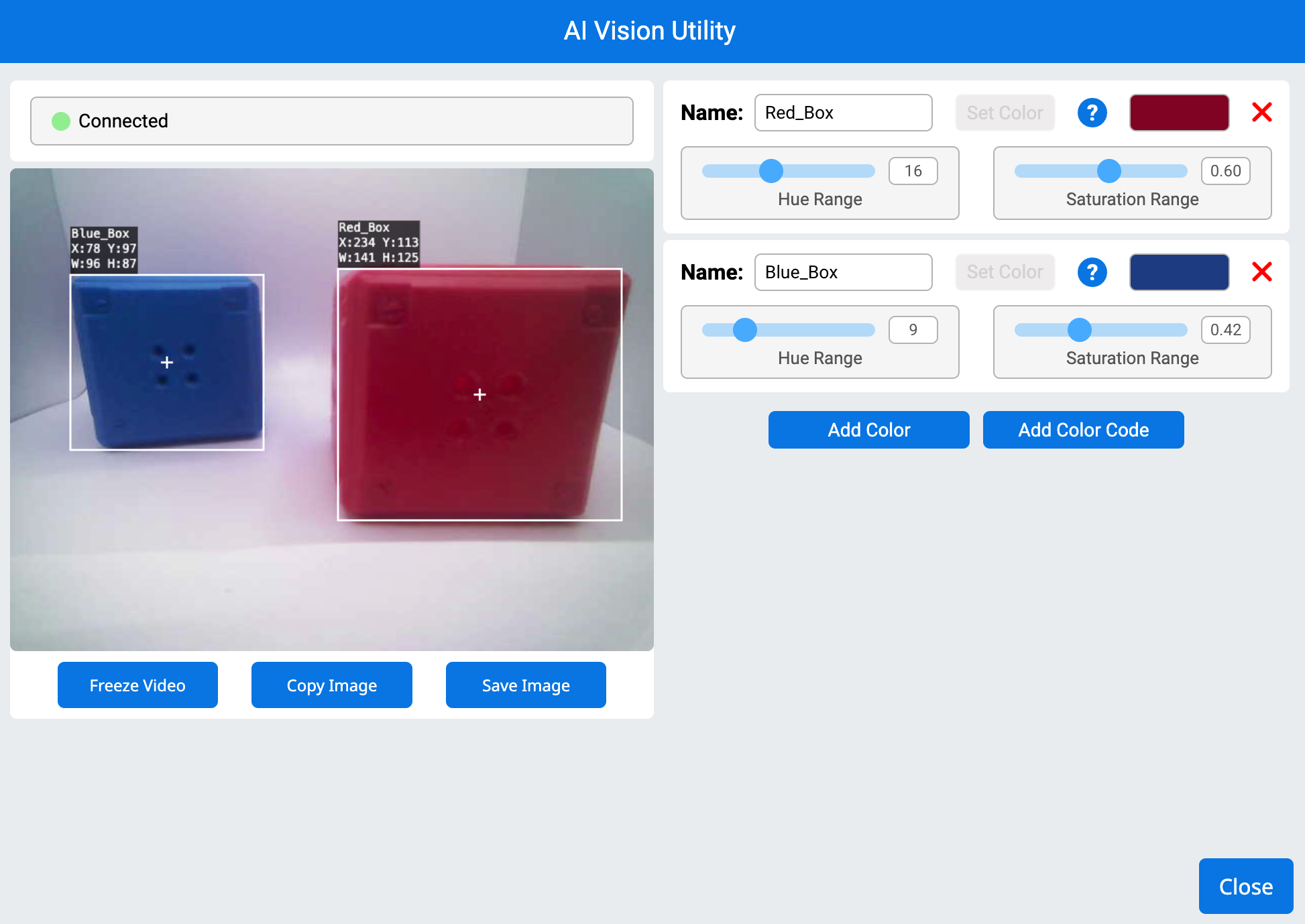
Color Signatures#
A color signature is a unique color that the AI Vision Sensor can recognize. These signatures allow the sensor to detect and track objects based on their color. Once a Color Signature is configured, the sensor can identify objects with that specific color in its field of view. Color signatures are used with get_data to process and detect colored objects in real-time.
# Display if any objects match the Red_Box signature
while True:
robot.screen.set_cursor(1, 1)
robot.screen.clear_row(1)
# Change to any configured Color Signature
ai_objects = robot.vision.get_data(Red_Box)
if ai_objects[0].exists:
robot.screen.print("Color signature detected!")
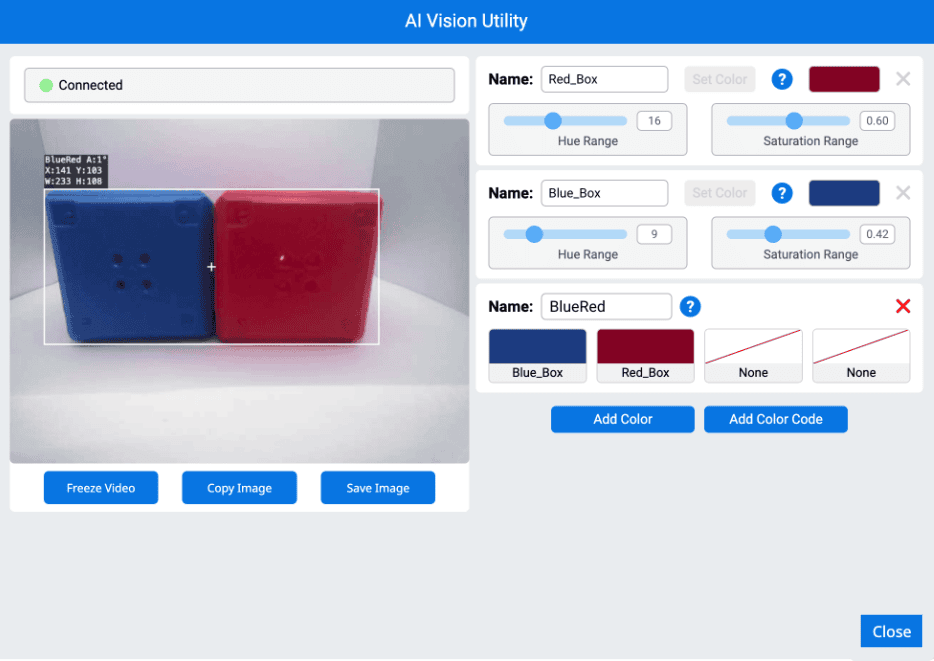
Color Codes#
A color code is a structured pattern made up of 2 to 4 color signatures arranged in a specific order. These codes allow the AI Vision Sensor to recognize predefined patterns of colors. Color codes are useful for identifying complex objects or creating unique markers for autonomous navigation.
# Display if any objects match the BlueRed code
while True:
robot.screen.set_cursor(1, 1)
robot.screen.clear_row(1)
# Change to any configured Color Code
ai_objects = robot.vision.get_data(BlueRed)
if ai_objects[0].exists:
robot.screen.print("Color code detected!")
has_sports_ball#
has_sports_ball returns a Boolean indicating whether the robot currently has a sports ball.
True— The robot has a sports ball.False— The robot does not have a sports ball.
Usage:
robot.has_sports_ball()
Parameters |
Description |
|---|---|
This method has no parameters. |
# Kick when the robot has a sports ball
while True:
if robot.has_sports_ball():
robot.kicker.kick(MEDIUM)
wait(50, MSEC)
has_any_barrel#
has_any_barrel returns a Boolean indicating whether the robot currently has any type of barrel.
True— The robot has a barrel.False— The robot does not have a barrel.
Usage:
robot.has_any_barrel()
Parameters |
Description |
|---|---|
This method has no parameters. |
# Push a barrel away when detected
while True:
if robot.has_any_barrel():
robot.kicker.place()
wait(50, MSEC)
has_blue_barrel#
has_blue_barrel returns a Boolean indicating whether the robot currently has a blue barrel.
True— The robot has a blue barrel.False— The robot does not have a blue barrel.
Usage:
robot.has_blue_barrel()
Parameters |
Description |
|---|---|
This method has no parameters. |
# Push a blue barrel away when detected
while True:
if robot.has_blue_barrel():
robot.kicker.place()
wait(50, MSEC)
has_orange_barrel#
has_orange_barrel returns a Boolean indicating whether the robot currently has an orange barrel.
True— The robot has an orange barrel.False— The robot does not have an orange barrel.
Usage:
robot.has_orange_barrel()
Parameters |
Description |
|---|---|
This method has no parameters. |
# Push an orange barrel away when detected
while True:
if robot.has_orange_barrel():
robot.kicker.place()
wait(50, MSEC)
Properties#
There are twelve properties that are included with each object stored in a tuple after the robot.vision.get_data method is used.
All property values except .id, .score, and .type describe the detected object’s position, size, orientation, or bearing at the moment robot.vision.get_data was used. These values are measured in pixels or degrees, based on the sensor’s 320 by 240 pixel resolution.
.exists#
.exists returns a Boolean indicating if the index exists in the tuple or not.
True— The index exists.False— The index does not exist.
# Check if at least two objects are detected
while True:
robot.screen.clear_screen()
robot.screen.set_cursor(1, 1)
ai_objects = robot.vision.get_data(ALL_CARGO)
if ai_objects[0].exists:
if ai_objects[1].exists:
robot.screen.print("At least 2")
else:
robot.screen.print("Less than 2")
wait(0.1, SECONDS)
.width#
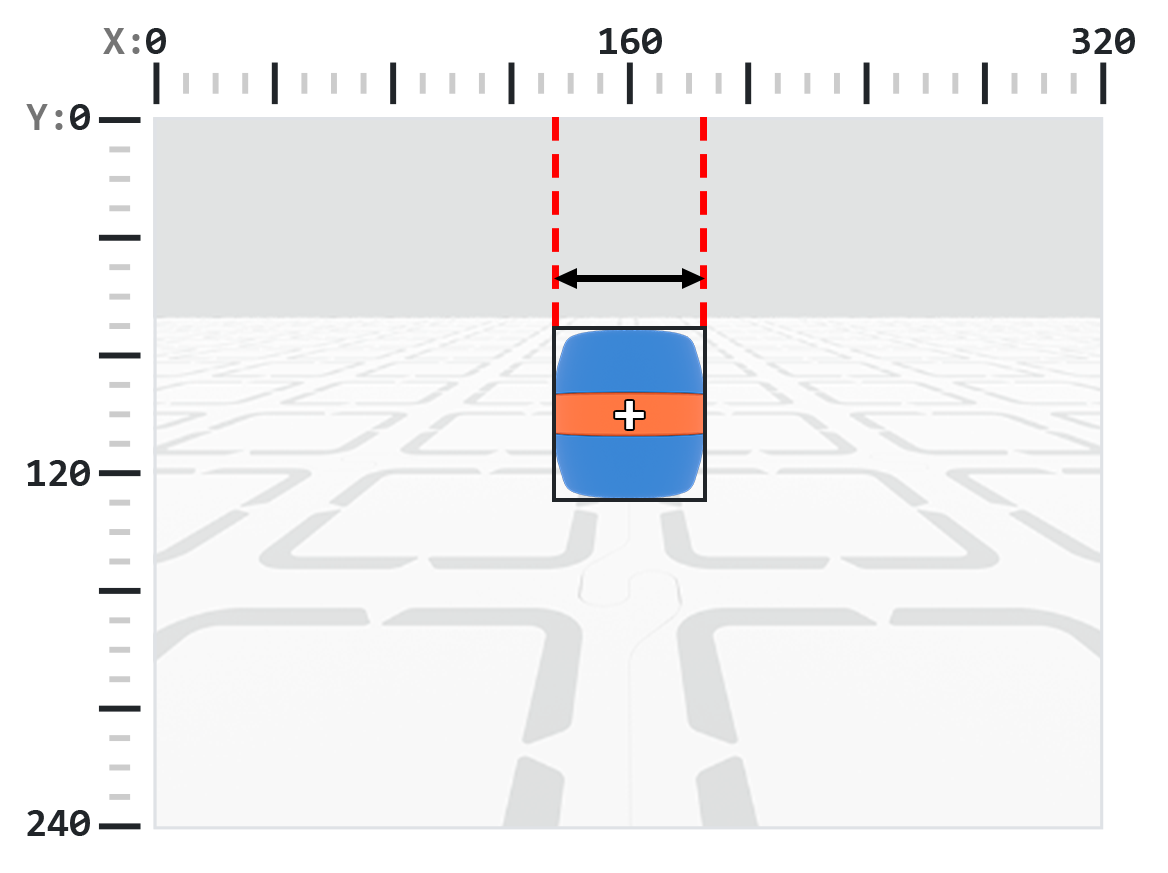
.width returns the width of the detected object in pixels, which is an integer between 1 and 320.
Note: Pixel values are relative to the sensor’s coordinate system. See the diagram in the Introduction for reference.
# Move towards a Blue Barrel until its width is
# larger than 100 pixels
while True:
barrel = robot.vision.get_data(BLUE_BARREL)
if barrel[0].exists:
if barrel[0].width < 100:
robot.move_at(0)
else:
robot.stop_all_movement()
wait(50, MSEC)
.height#
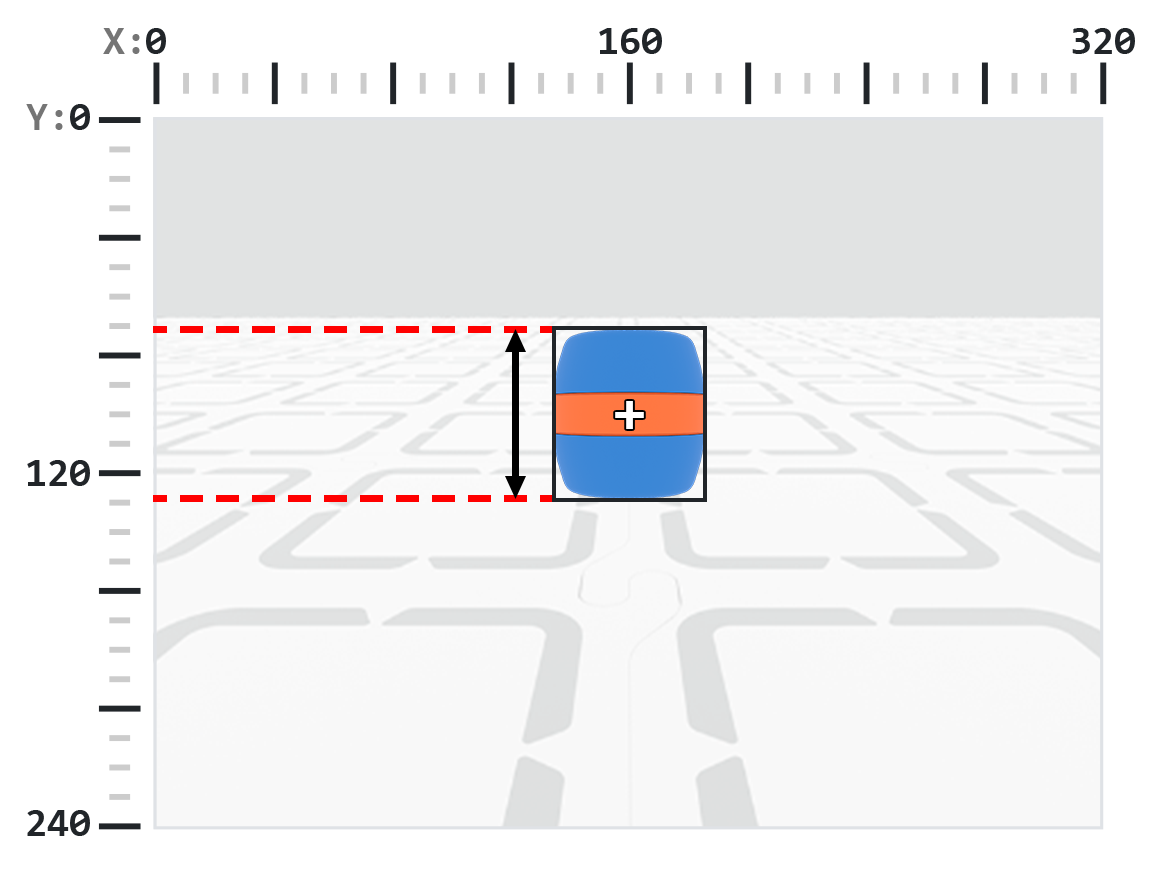
.height returns the height of the detected object in pixels, which is an integer between 1 and 240.
Note: Pixel values are relative to the sensor’s coordinate system. See the diagram in the Introduction for reference.
# Move towards a Blue Barrel until its height is
# larger than 100 pixels
while True:
barrel = robot.vision.get_data(BLUE_BARREL)
if barrel[0].exists:
if barrel[0].height < 100:
robot.move_at(0)
else:
robot.stop_all_movement()
wait(50, MSEC)
.centerX#
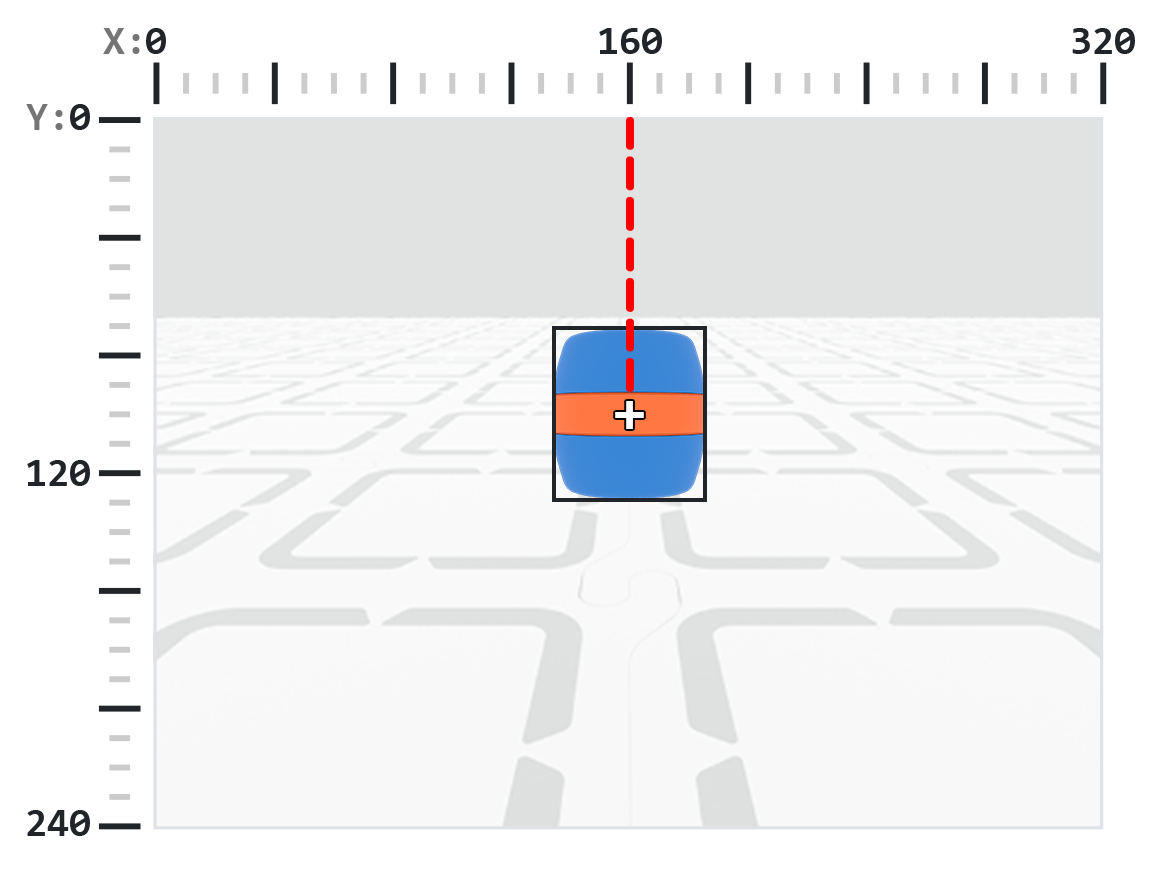
.centerX returns the x-coordinate of the detected object’s center in pixels, which is an integer between 0 and 320.
Note: Pixel values are relative to the sensor’s coordinate system. See the diagram in the Introduction for reference.
# Turn slowly until a Blue Barrel is centered in
# front of the robot
robot.set_turn_velocity(30)
robot.turn(RIGHT)
while True:
barrel = robot.vision.get_data(BLUE_BARREL)
if barrel[0].exists:
if 140 < barrel[0].centerX < 180:
robot.stop_all_movement()
wait(10,MSEC)
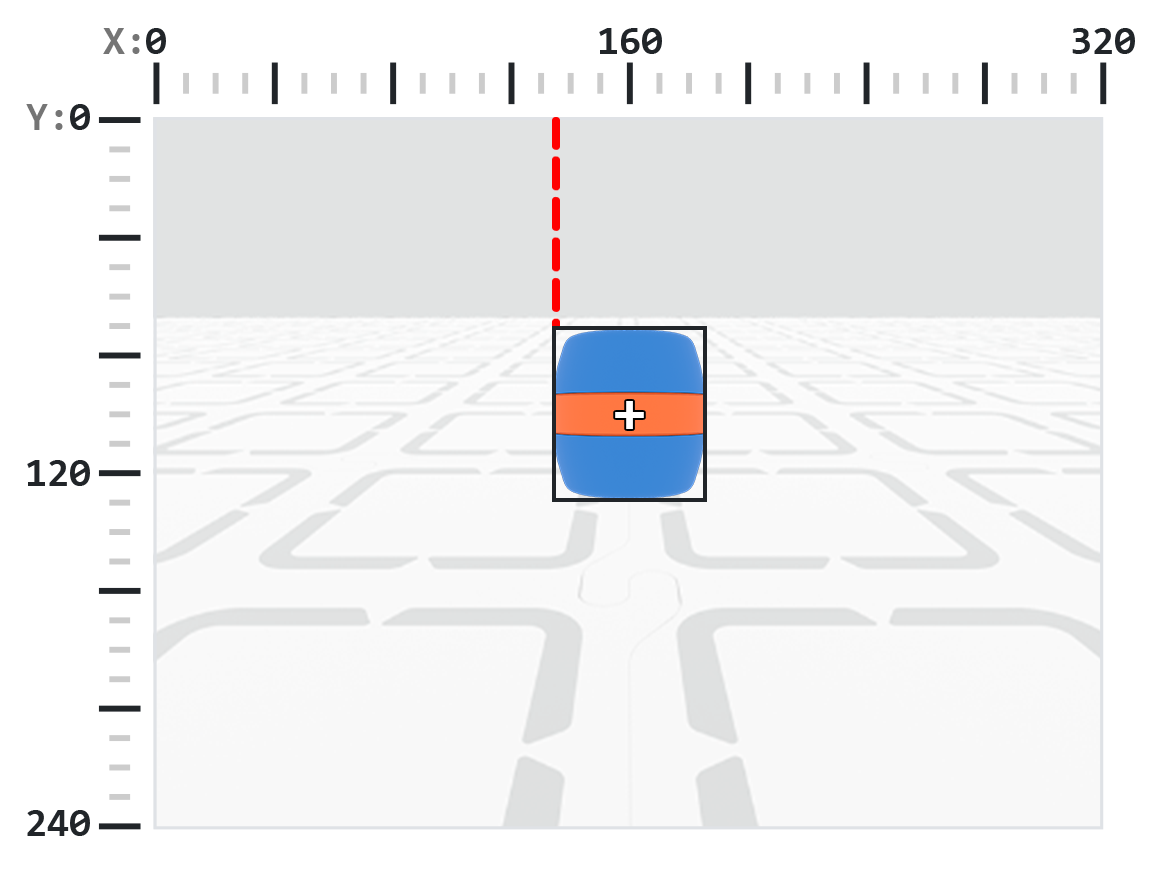
.centerY#
.centerY returns the y-coordinate of the detected object’s center in pixels, which is an integer between 0 and 240.
Note: Pixel values are relative to the sensor’s coordinate system. See the diagram in the Introduction for reference.
# Move towards a Blue Barrel until its
# center y-coordinate is more than 140 pixels
while True:
barrel = robot.vision.get_data(BLUE_BARREL)
if barrel[0].exists:
if barrel[0].centerY < 140:
robot.move_at(0)
else:
robot.stop_all_movement()
wait(50, MSEC)
.bearing#
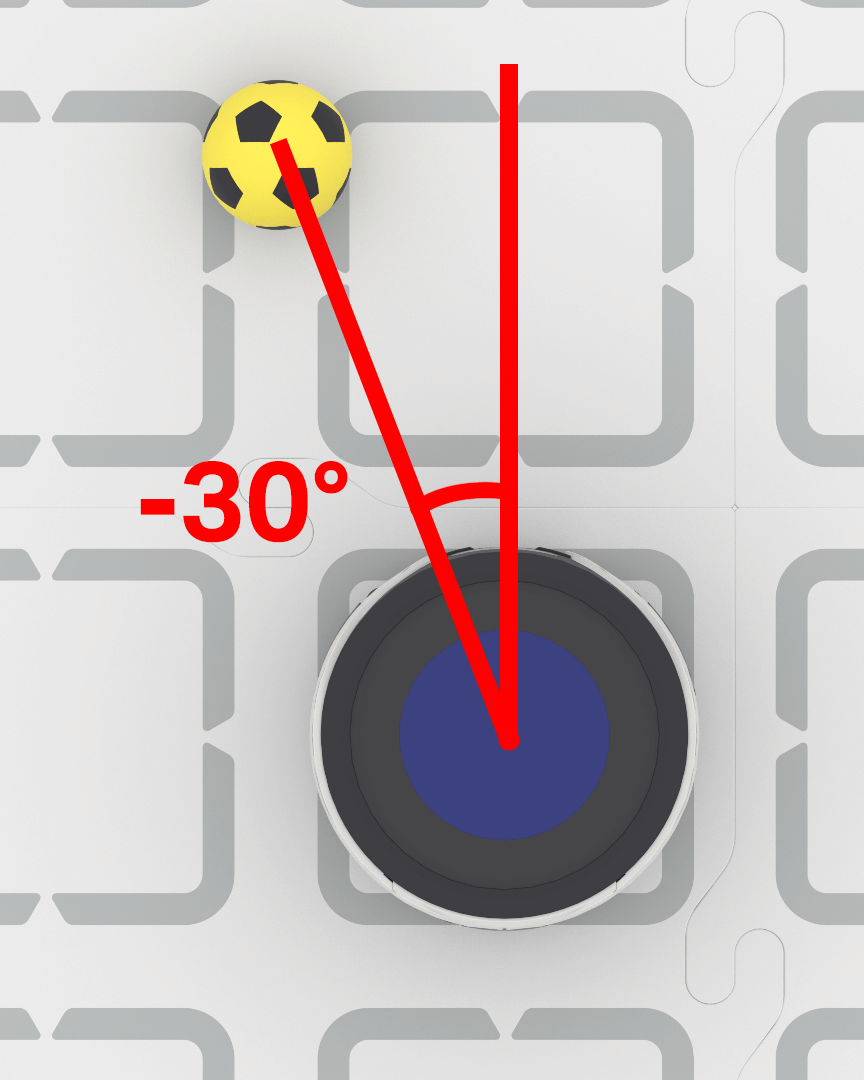
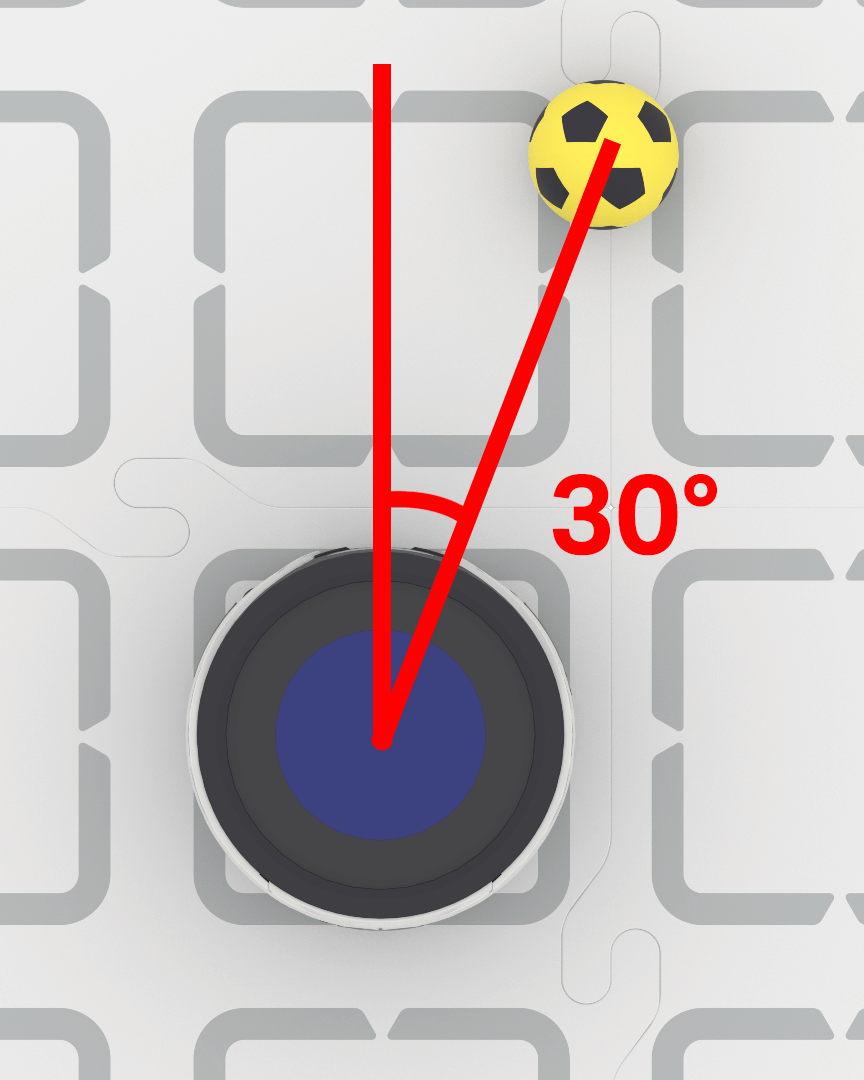
.bearing returns a decimal (float) representing how far an object is to the left or right of the center of the AI Vision Sensor’s view as a degree. A value of 0 means it’s centered, positive values mean the object is to the right, and negative values mean the object is to the left.
# Turn to keep the Blue Barrel directly in front
robot.set_turn_velocity(40)
while True:
vision_data = robot.vision.get_data(BLUE_BARREL)
if vision_data[0].exists:
if vision_data[0].bearing > 5:
robot.turn(RIGHT)
elif vision_data[0].bearing < -5:
robot.turn(LEFT)
else:
robot.stop_all_movement()
else:
robot.stop_all_movement()
wait(0.1, SECONDS)
.rotation#
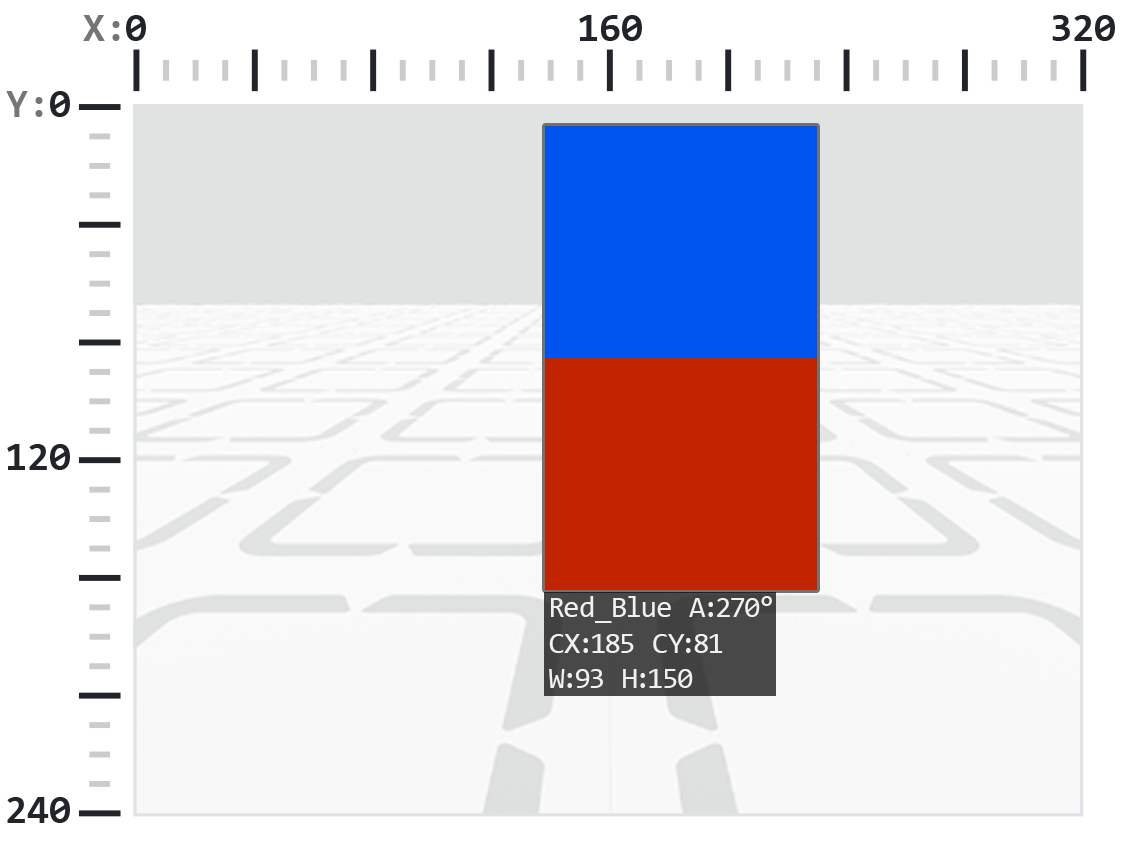
.rotation returns the object’s orientation on the AI Vision Sensor’s viewing plane, measured in degrees from 0 to 359. A Color Code is 0° when its colors are arranged in a horizontal line (e.g., Red–Blue). If the colors are rotated, the angle changes (e.g., arranging Blue-Red returns 180°).
For the example below, the Color Code has been configured with red on the left and blue on the right.
In this image, putting blue on top of red is equivalent to rotating the original Color Code 270 degrees to the right.
# Slide left or right depending on how a Color Code (BlueRed)
# is rotated on the vertical plane
while True:
# Original Color Code is Red to the left, Blue to the right
code = robot.vision.get_data(BlueRed)
if code[0].exists:
# Check if Color Code is now Red on top of Blue
if 50 < code[0].rotation < 100 :
robot.move_at(90)
# Check if Color Code is now Blue on top of Red
elif 270 < code[0].rotation < 330 :
robot.move_at(270)
else:
robot.stop_all_movement()
else:
robot.stop_all_movement()
wait(50, MSEC)
.originX#
.originX returns the x-coordinate of the top-left corner of the detected object’s bounding box in pixels, which is an integer between 0 and 320.
Note: Pixel values are relative to the sensor’s coordinate system. See the diagram in the Introduction for reference.
# Display if an Orange Barrel is to the
# left or the right
while True:
robot.screen.clear_screen()
robot.screen.set_cursor(1,1)
orange_barrel = robot.vision.get_data(ORANGE_BARREL)
if orange_barrel[0].exists:
if orange_barrel[0].originX < 160:
robot.screen.print("To the left!")
else:
robot.screen.print("To the right!")
wait(50, MSEC)
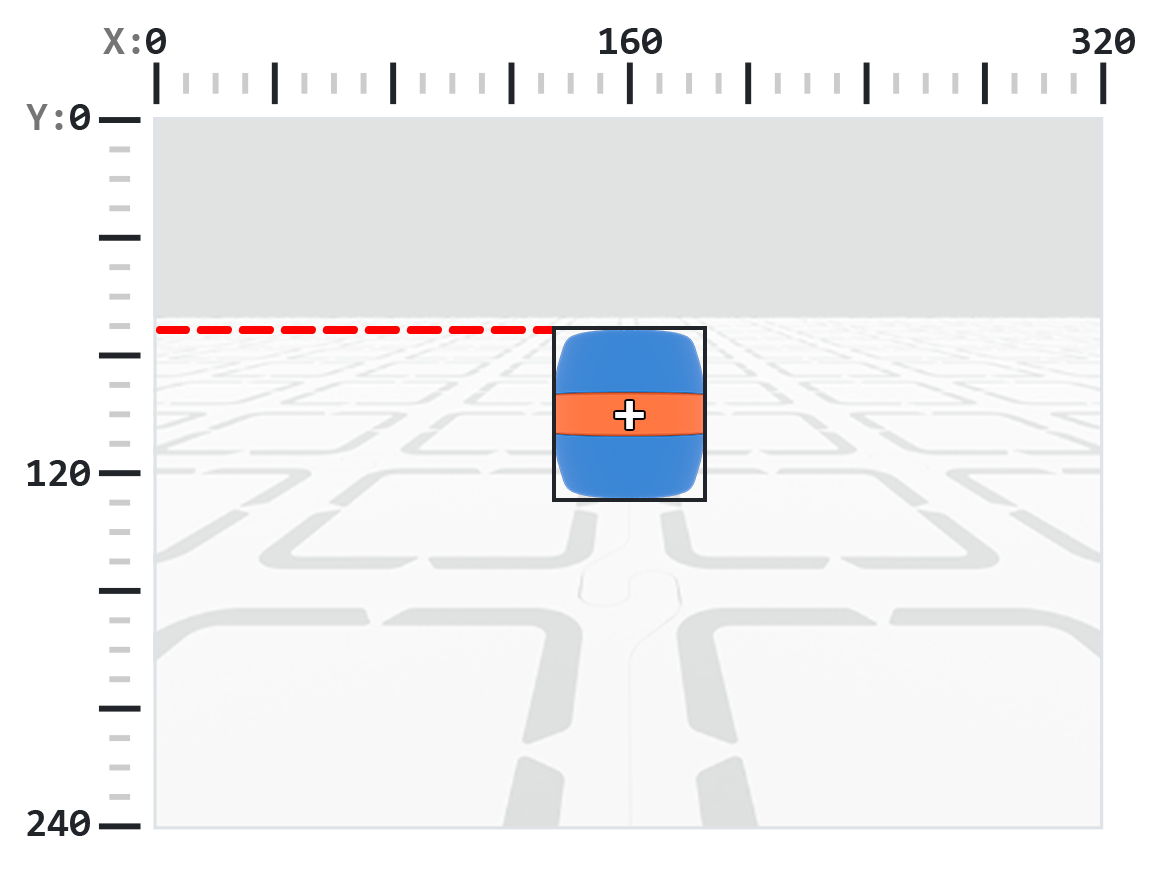
.originY#
.originY returns the y-coordinate of the top-left corner of the detected object’s bounding box in pixels, which is an integer between 0 and 240.
Note: Pixel values are relative to the sensor’s coordinate system. See the diagram in the Introduction for reference.
# Display if an Orange Barrel is close or far
# from the robot
while True:
robot.screen.clear_screen()
robot.screen.set_cursor(1, 1)
orange_barrel = robot.vision.get_data(ORANGE_BARREL)
if orange_barrel[0].exists:
if orange_barrel[0].originY < 80:
robot.screen.print("Far")
else:
robot.screen.print("Close")
wait(50, MSEC)
.id#
.id returns the ID of the detected AI Classification or AprilTag ID as an integer.
For an AprilTag ID, the .id property represents the detected AprilTag ID number in the range of 0 to 37. For an AI Classification, the .id property corresponds to the predefined ID in the AI Classifications section.
# Move forward when AprilTag ID 1 is detected
while True:
apriltags = robot.vision.get_data(ALL_TAGS)
if apriltags[0].exists:
if apriltags[0].id == 1:
robot.move_at(0)
else:
robot.stop_all_movement()
wait(50, MSEC)
.score#
.score returns the confidence score of the detected AI Classification as an integer between 1 and 100.
A lower score means the sensor is less confident about the detected object, while a higher score means the sensor is more confident.
# Look confident if an Orange Barrel is detected
while True:
barrel = robot.vision.get_data(ORANGE_BARREL)
if barrel[0].exists:
if barrel[0].score > 95:
robot.screen.show_emoji(CONFIDENT)
else:
robot.screen.hide_emoji()
wait(50, MSEC)
.type#
.type returns an integer that indicates the type of object detected. You can compare this value using either the type number or the corresponding named constant:
Object Type |
Included Objects |
|---|---|
|
— Sports balls |
|
— AprilTag IDs |
|
— Color signatures |
|
— Color codes |
# Display if an AprilTag ID or AI Classification
# is detected
while True:
robot.screen.clear_screen()
robot.screen.set_cursor(1, 1)
vision_data = robot.vision.get_data(ALL_VISION)
if vision_data[0].exists:
if vision_data[0].type == AiVision.AI_OBJECT:
robot.screen.print("AI Object!")
elif vision_data[0].type == AiVision.TAG_OBJECT:
robot.screen.print("AprilTag ID!")
wait(0.1, SECONDS)
# Display a list of all detected objects
while True:
robot.screen.clear_screen()
robot.screen.set_cursor(1, 1)
vision_data = robot.vision.get_data(ALL_VISION)
if vision_data[0].exists:
for obj in vision_data:
if obj.type == AiVision.AI_OBJECT:
robot.screen.print("- AI Object")
elif obj.type == AiVision.TAG_OBJECT:
robot.screen.print("- AprilTag ID")
robot.screen.next_row()
wait(0.1, SECONDS)
Constructors#
Creating a Color Signature#
A new Color Signature is created using the Colordesc constructor and then registered with the AI Vision Sensor using the color_description method. A Colordesc object defines 1 of up to 7 detectable color signatures for the sensor, but it must be explicitly set using color_description to take effect.
Colordesc Usage:
Colordesc(index, red, green, blue, hangle, hdsat)
Parameter |
Description |
|---|---|
|
An integer from 1 to 7 representing the Color Signature index. If two Color Signatures use the same index, the second will override the first. |
|
An integer from 0 to 255 for the red component of the color. |
|
An integer from 0 to 255 for the green component of the color. |
|
An integer from 0 to 255 for the blue component of the color. |
|
A float from 1 to 40 representing the hue range in degrees. |
|
A float from 0.10 to 1.00 representing the saturation range. |
color_description Usage:
robot.vision.color_description(object)
Parameter |
Description |
|---|---|
|
The |
# Detect a red object
red_box = Colordesc(1, 207, 19, 25, 10.00, 0.20)
robot.vision.color_description(red_box)
while True:
robot.screen.clear_screen()
robot.screen.set_cursor(1, 1)
red_boxes = robot.vision.get_data(red_box)
if red_boxes[0].exists:
robot.screen.print("Red detected!")
else:
robot.screen.print("No red detected.")
wait(0.2, SECONDS)
Creating a Color Code#
A new Color Code is created using the Codedesc constructor and then activated using the code_description method. A Color Code groups 2 to 4 existing Colordesc objects into a single identifier that the AI Vision Sensor can detect as a sequence, but it must be explicitly set using code_description to take effect.
Codedesc Usage:
Codedesc(index, c1, c2, c3, c4, c5)
Parameter |
Description |
|---|---|
|
The index of the Color Code, from 1 to 8. Note: If you create two |
|
The first |
|
The second |
|
Optional. A third |
|
Optional. A fourth |
code_description Usage:
robot.vision.code_description(object)
Parameter |
Description |
|---|---|
|
A |
# Create Color Signatures
red_box = Colordesc(1, 207, 19, 25, 10.00, 0.20)
purple_box = Colordesc(2, 98, 18, 227, 10.00, 0.20)
robot.vision.color_description(red_box)
robot.vision.color_description(purple_box)
# Detect a red_purple Color Code
red_purple = Codedesc(1, red_box, purple_box)
robot.vision.code_description(red_purple)
while True:
robot.screen.clear_screen()
robot.screen.set_cursor(1, 1)
code_objects = robot.vision.get_data(red_purple)
if code_objects[0].exists:
robot.screen.print("Code detected!")
else:
robot.screen.print("No code detected.")
wait(0.2, SECONDS)