在接入点模式下更改 VEX AIM 的 IP 地址#
机器人进入接入点 (AP) 模式后,您可以根据需要选择为其分配自定义 IP 地址。这可以使重新连接更加轻松且更加一致,尤其是在存在多个机器人或共享网络的环境中。本页介绍如何配置机器人的 AP 模式 IP 地址以及如何更新您的工作空间以进行匹配。
1. Access the AIM Setup Dashboard#
在 Web 浏览器中,从接入点信息菜单输入机器人的 IP 地址。

2.更新IP地址#
通过编辑IP 地址(仅限 AP 模式)字段并选择保存应用更改来手动更新 IP 地址。
AIM 设置屏幕顶部显示版本号,并包含一个标题为“WiFi 参数”的部分。标有“IP 地址(仅限 AP 模式)”的字段突出显示,其中包含地址 192.165.5.1。](/_static/img/Websocket/IP_Address_change.png)
注意:不要选中加入现有网络。
3.克隆WebSocket存储库#
用于与 VEX AIM 编码机器人通信的 WebSocket 客户端库可在 GitHub 上找到。
首先,克隆存储库并在您喜欢的 Python 编辑器或 IDE(例如 VS Code、PyCharm 或基于终端的编辑器(如 Vim))中打开它。
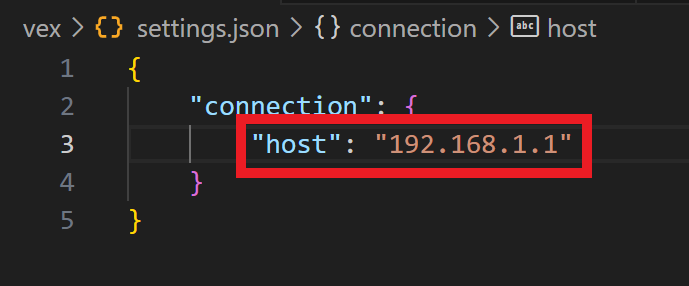
4.保存配置的IP地址#
Open the settings.json file located in the vex folder. Update the host field with the IP Address assigned in Station Mode.
如果您…/websocket_library_setup/setting_up.md没有设置 Python 虚拟环境,现在可以继续了。