控制器#
介绍#
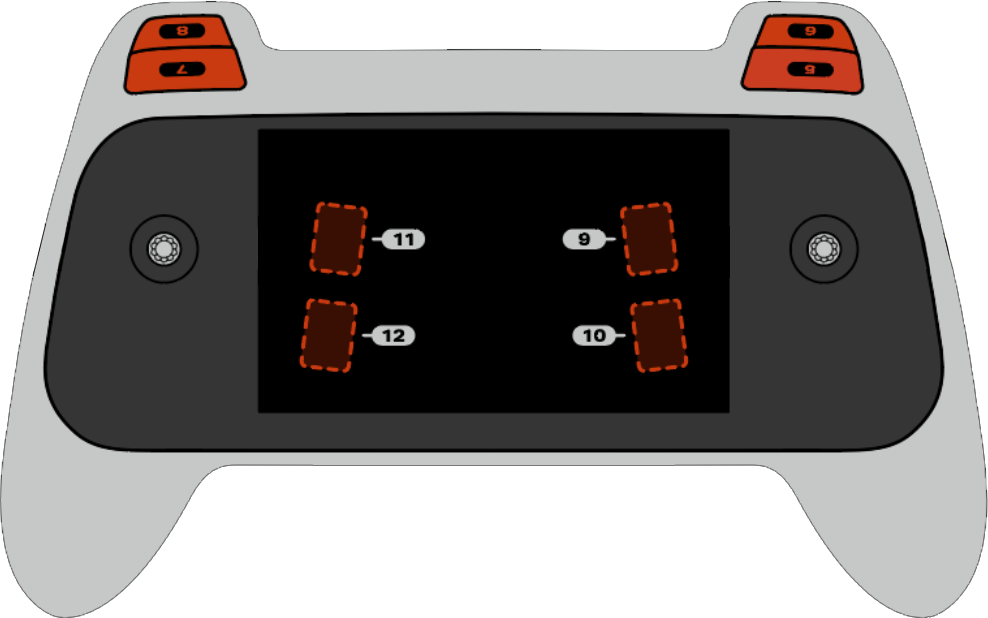
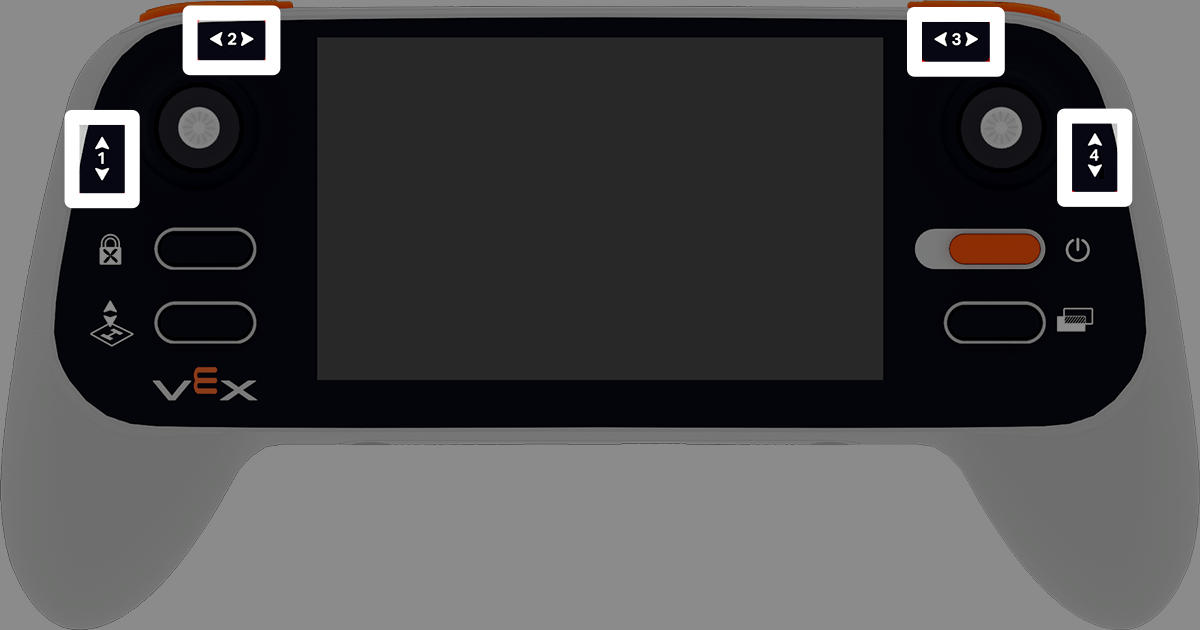
VEX AIR 无人机控制器采用 12 个按钮布局和两个操纵杆。这些输入使无人机能够检测按钮按下和操纵杆移动,从而实现交互式和灵敏的控制。
以下是所有可用块的列表:
控制器按钮被按下 — 检查当前是否按下了某个特定的按钮。
控制器轴位置 — 报告操纵杆沿指定轴的位置。
控制器已连接 — 报告控制器是否已连接到无人机。
控制器电池电量 — 报告控制器的电池电量。
当控制器按钮时 — 按下或释放按钮时运行一堆块。
当控制器轴改变时 — 当操纵杆的位置沿选定的轴改变时,运行附加的堆栈。
按下控制器按钮#
控制器按钮被按下 布尔块报告特定控制器按钮是否被按下。
正确 — 指定的按钮正在被按下。
错误 — 指定的按钮未被按下。
控制器按钮按下布尔块。#
<遥控器按键 [5 v] 按下了?>
参数 |
描述 |
|---|---|
按钮 |
检查是否被按下的按钮,范围从5到12。 |
例子
当开始
[Take a picture when button 5 is pressed.]
起飞至 [500] [毫米 v] ▶
永久循环
使用遥控器移动
如果 <遥控器按键 [5 v] 按下了?> 那么
在 [向前 v] 相机上捕捉图像
结束
结束
控制器轴位置#
控制器轴位置报告模块报告指定操纵杆轴的位置。该模块报告的数值为 -100 到 100 之间的整数。
控制器轴位置报告块。#
(控制器轴 [1 v] 位置)
参数 |
描述 |
|---|---|
轴 |
报告位置的轴:
|
例子
当开始
[Climb when the left joystick is moved up.]
起飞至 [500] [毫米 v] ▶
永久循环
如果 <(控制器轴 [1 v] 位置) [math_greater_than v] [0]> 那么
爬升 [向上 v]
否则
徘徊
结束
控制器已连接#
控制器已连接 布尔块报告控制器是否已连接到无人机。
正确 — 控制器已连接。
错误 — 控制器未连接。
控制器轴位置报告块。#
<控制器是否连接到无人机?>
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[Print controller connection status on screen.]
永久循环
如果 <控制器是否连接到无人机?> 那么
清屏
在屏幕上设定光标至 (1) 行 (1) 列
在屏幕上打印 [Controller connected]▶
等待 (0.5) 秒
结束
结束
控制器电池电量#
控制器电池电量报告模块会报告控制器的电池电量,以 0% 到 100% 的百分比表示。
控制器轴位置报告块。#
(控制器电池电量百分比)
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[Show controller's battery level.]
如果 <(控制器电池电量百分比) [math_greater_than v] [50]> 那么
在屏幕上打印 [Battery level ok]▶
否则
在屏幕上打印 [Battery level low]▶
当控制器按钮#
当按下或释放按钮时,当控制器按钮帽子模块会运行连接的模块堆栈。
当控制器按钮帽子块。#
当遥控器按键 [5 v] [pressed v]
参数 |
描述 |
|---|---|
按钮 |
确定哪个按钮将触发该事件,取值范围为 5 到 12。 |
行动 |
决定何时执行所附加的模块堆栈:pressed 将在按下按钮时运行,released 将在释放按钮时运行。 |
例子
当开始
起飞至 [500] [毫米 v] ▶
永久循环
使用遥控器移动
结束
当遥控器按键 [5 v] [pressed v]
[Take a picture when button 5 is pressed.]
在 [向前 v] 相机上捕捉图像
当控制器轴改变时#
当控制器轴发生变化时,当控制器轴发生变化时帽子模块会运行附加的堆栈,当操纵杆的位置沿选定的轴发生变化时。
当控制器轴改变时帽子块。#
当遥控器 [1 v] 轴改变
参数 |
描述 |
|---|---|
轴 |
需要监测变化的轴:
|
例子
当开始
[Move forward when the left joystick moves.]
起飞至 [500] [毫米 v] ▶
当遥控器 [1 v] 轴改变
将 [向前 v] 移至 (200) [毫米 v] ▶