运动#
介绍#
VEX AIR 无人机配备四个螺旋桨,使其能够向任意方向移动并独立旋转。运动控制功能包括移动、转向、速度调节和位置跟踪。
以下是可用块的列表:
动作——移动并转动无人机。
起飞 — 将无人机提升到指定高度。
land — 无人机着陆。
hover — 保持无人机在其位置。
climb — 使无人机沿指定的垂直方向移动。
climb for — 将无人机沿指定的垂直方向移动特定的距离。
爬升到 z 轴位置 — 将无人机移动到 z 轴上的指定位置。
move — 使无人机向前、向后、向左或向右移动。
以角度移动 — 使用角度将无人机向指定方向移动。
move for — 将无人机沿特定方向移动一段设定的距离。
以角度移动 — 以特定角度移动无人机一段设定的距离。
move to — 将无人机移动到指定位置。
turn — 向左或向右旋转无人机。
turn for — 将无人机旋转指定的角度。
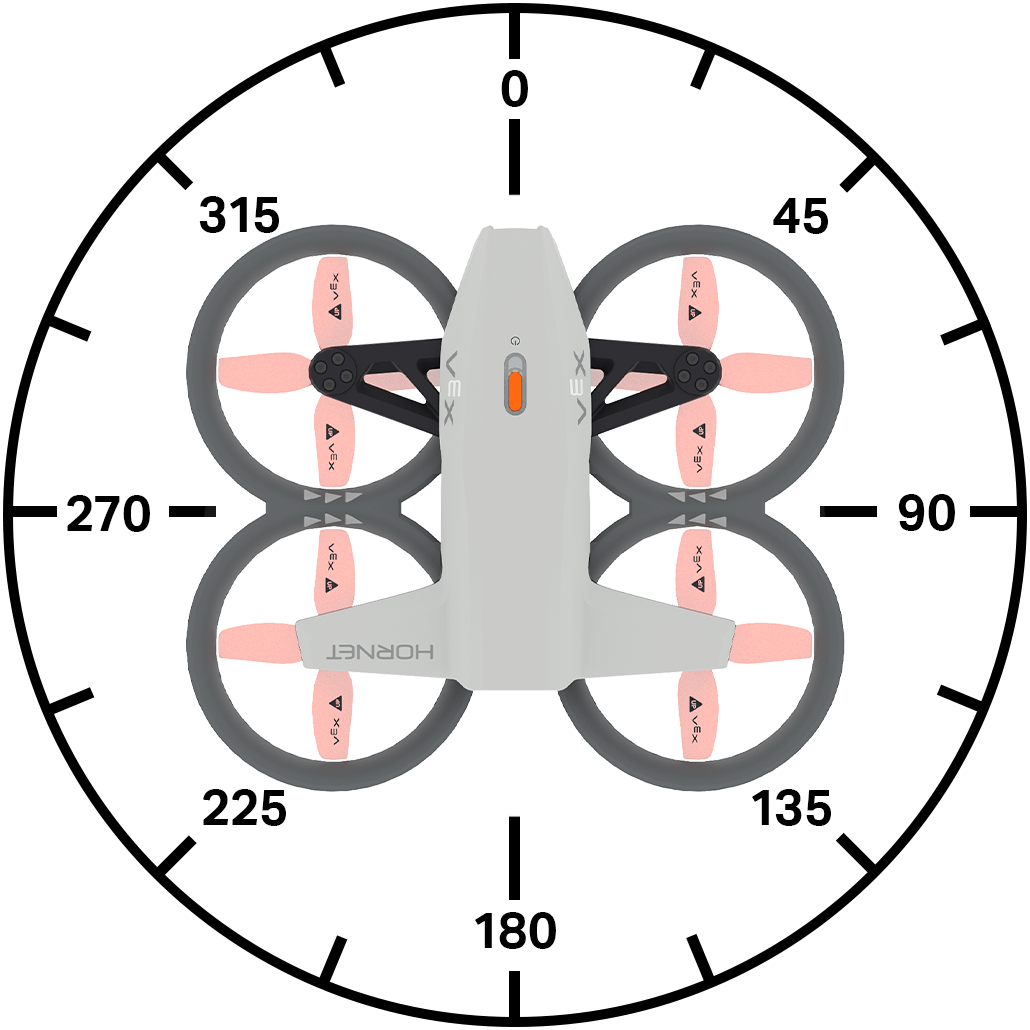
转向航向 — 旋转无人机以面向特定航向。
使用控制器移动 — 允许使用控制器驱动无人机。
飞行控制——调整飞行设置。
设置转向 POV — 设置无人机转向的 POV。
set movement — 设置无人机的运动方式。
设置 — 调整移动和转向速度。
位置——跟踪和修改无人机的位置。
position — 返回无人机当前的 x、y 或 z 坐标。
获取最大 z 高度 — 返回无人机可以达到的最大高度。
设置最大 z 高度 - 设置无人机飞行高度的限制。
设置位置 — 手动设置无人机的 x、y 或 z 位置。
值——检查运动状态。
飞行状态 — 返回无人机的当前状态。
安全模式 — 返回无人机的螺旋桨锁定状态。
climb active — 返回无人机当前是否正在爬升。
move active — 返回无人机当前是否正在移动。
turn active — 返回无人机当前是否正在转弯。
hovering — 返回无人机当前是否处于悬停状态。
起飞 — 返回无人机当前是否正在起飞。
landing — 返回无人机当前是否正在着陆。
landed — 返回无人机是否已着陆。
行动#
起飞#
起飞 模块启动螺旋桨,将无人机升空。必须先使用此模块才能执行其他操作。
起飞至 [500] [毫米 v] ▶
参数 |
描述 |
|---|---|
爬到 |
无人机将爬升到的z轴位置(高度)。 |
单位 |
计量单位:mm(毫米)或英寸。 |
不要等待 |
选择箭头(▶)展开代码块,显示“不要等待”,这样堆栈中的下一个代码块就会立即运行。 |
例子
当开始
[Fly for 1 second.]
起飞至 [500] [毫米 v] ▶
等待 [1] 秒
土地 ▶
土地#
地面吊装模块将无人机缓缓降落到地面。螺旋桨将持续运转,直至项目停止。
土地 ▶
参数 |
描述 |
|---|---|
不要等待 |
选择箭头(▶)展开代码块,显示“不要等待”,这样堆栈中的下一个代码块就会立即运行。 |
例子
当开始
[Land after 1 second.]
起飞至 (500) [毫米 v] ▶
等待 [1] 秒
土地 ▶
徘徊#
悬停堆栈块可使无人机停止向任何方向移动,并保持其在空中的当前位置。
徘徊
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[Hold current position for 3 seconds after moving forward.]
起飞至 (500) [毫米 v] ▶
移动 [向前 v]
等待 [1] 秒
徘徊
等待 [3] 秒
土地 ▶
爬#
爬升堆叠模块使无人机沿指定的垂直方向移动。
爬升 [向上 v]
参数 |
描述 |
|---|---|
方向 |
无人机的飞行方向:向上或向下。 |
例子
当开始
[Climb upwards for 2 seconds.]
起飞至 (500) [毫米 v] ▶
等待 [2] 秒
爬升 [向上 v]
等待 [2] 秒
土地 ▶
攀登#
爬升堆叠模块使无人机沿指定的垂直方向移动指定的距离。
爬升 [向上 v] 获得 (500) [毫米 v] ▶
参数 |
描述 |
|---|---|
方向 |
无人机的飞行方向:向上或向下。 |
距离 |
无人机的飞行距离。 |
单位 |
计量单位:mm(毫米)或英寸。 |
不要等待 |
选择箭头(▶)展开代码块,显示“不要等待”,这样堆栈中的下一个代码块就会立即运行。 |
例子
当开始
[Lower drone before landing.]
起飞至 [700] [毫米 v] ▶
等待 [1] 秒
爬升 [向下 v] 获得 [300] [毫米 v] ▶
等待 [1] 秒
土地 ▶
爬到 z 位置#
爬升到 z 轴位置 堆栈块将无人机移动到 z 轴上的指定位置。
爬到 z 位置 [500] [毫米 v] ▶
参数 |
描述 |
|---|---|
z 位置 |
无人机将爬升至的 z 位置(整数或小数)。 |
单位 |
计量单位:mm(毫米)或英寸。 |
不要等待 |
选择箭头(▶)展开代码块,显示“不要等待”,这样堆栈中的下一个代码块就会立即运行。 |
例子
当开始
[Reach 500 mm after takeoff.]
起飞至 [300] [毫米 v] ▶
等待 [1] 秒
爬到 z 位置 [500] [毫米 v] ▶
等待 [1] 秒
土地 ▶
移动#
move 堆栈块使用当前的移动速度 使无人机沿四个特定方向移动。
移动 [向前 v]
参数 |
描述 |
|---|---|
方向 |
控制无人机朝以下方向之一移动:
|
例子
当开始
[Move forward for 2 seconds.]
起飞至 [500] [毫米 v] ▶
移动 [向前 v]
等待 [2] 秒
土地 ▶
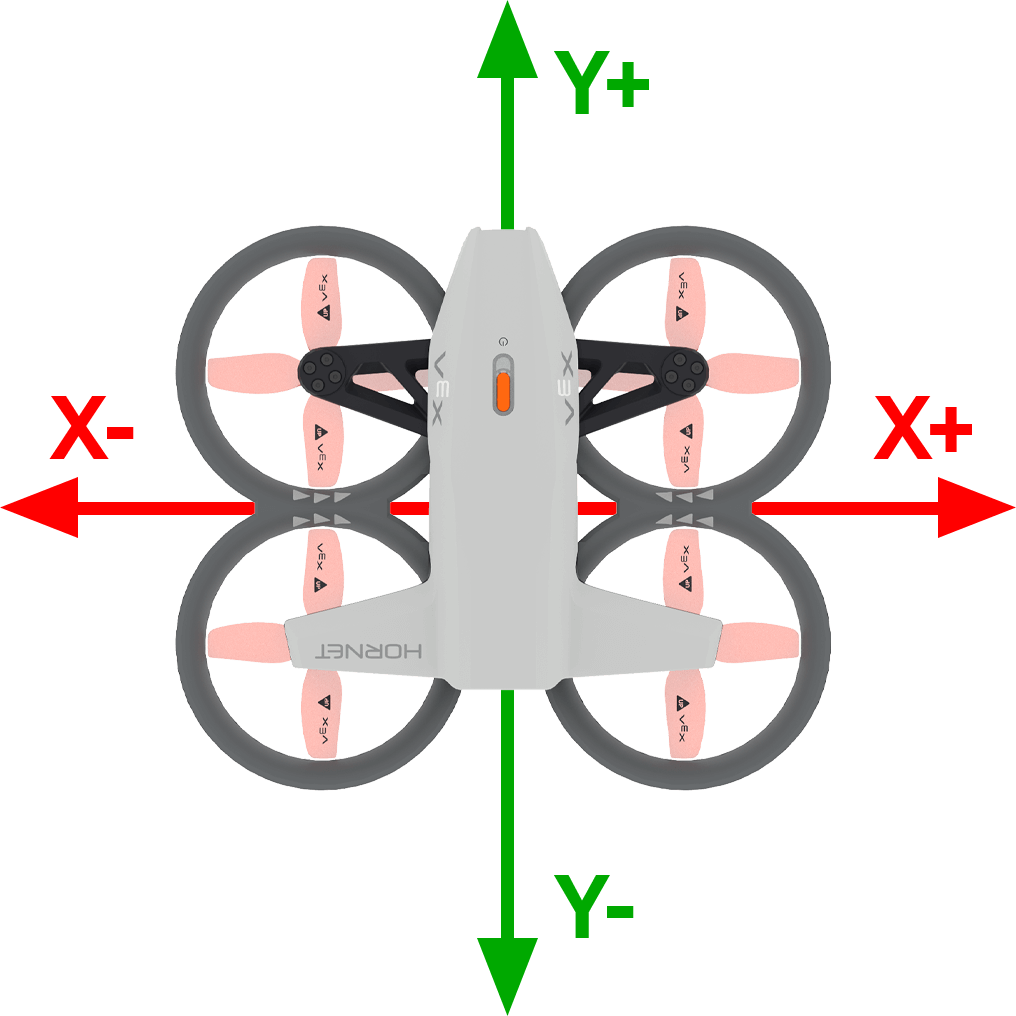
以角度移动#
以一定角度移动堆栈块使用当前的移动速度 以指定的角度移动无人机。
以 (90) 度移动
参数 |
描述 |
|---|---|
角度 |
无人机移动的角度,以整数或小数表示,范围从 0 到 359 度。 |
示例
当开始
[Move left for 2 seconds.]
起飞至 [500] [毫米 v] ▶
以 [270] 度移动
等待 [2] 秒
土地 ▶
移动#
move for 堆栈块使用当前的 移动速度 使无人机沿四个特定方向移动特定距离。
将 [向前 v] 移至 (200) [毫米 v] ▶
参数 |
描述 |
|---|---|
方向 |
控制无人机朝以下方向之一移动:
|
距离 |
无人机移动的距离,以整数或小数表示。 |
单位 |
计量单位:mm(毫米)或英寸。 |
不要等待 |
选择箭头(▶)展开代码块,显示“不要等待”,这样堆栈中的下一个代码块就会立即运行。 |
例子
当开始
[Move forward for 200 mm.]
起飞至 [500] [毫米 v] ▶
将 [向前 v] 移至 [200] [毫米 v] ▶
土地 ▶
以一定角度移动#
以特定角度移动 堆栈块使用当前的 移动速度 使无人机以特定角度移动指定的距离。
以 (45) 度移动 (200) [毫米 v] ▶
参数 |
描述 |
|---|---|
角度 |
无人机移动的角度,以整数或小数表示,范围从 0 到 359 度。 |
距离 |
无人机移动的距离,以整数或小数表示。 |
单位 |
计量单位:mm(毫米)或英寸。 |
不要等待 |
选择箭头(▶)展开代码块,显示“不要等待”,这样堆栈中的下一个代码块就会立即运行。 |
示例
当开始
[Move diagonally for 500 mm.]
起飞至 [300] [毫米 v] ▶
以 [45] 度移动 [500] [毫米 v] ▶
土地 ▶
移至#
move to 堆栈块将无人机移动到空中的指定位置,同时保持相同的航向。
移动到 x: [1000] y: [1000] z: [1000] [毫米 v] ▶
参数 |
描述 |
|---|---|
x |
无人机将移动到的 x 坐标。 |
y |
无人机将移动到的 y 坐标。 |
z |
无人机将爬升至的 z 坐标。 |
单位 |
计量单位:mm(毫米)或英寸。 |
示例
当开始
[Move diagonally to (300, 300, 500).]
起飞至 [300] [毫米 v] ▶
等待 [2] 秒
移动到 x: [300] y: [300] z: [500] [毫米 v] ▶
等待 [2] 秒
土地 ▶
转动#
turn 堆栈块使用当前的 转弯速度 将无人机转向特定方向。
[右 v] 转
参数 |
描述 |
|---|---|
方向 |
无人机的转向方向:向右或向左。 |
例子
当开始
[Turn to the right for 2 seconds.]
起飞至 [500] [毫米 v] ▶
[右 v] 转
等待 [2] 秒
土地 ▶
转向#
turn for 堆栈块使用当前的 转弯速度 将无人机沿指定方向转弯一段距离,相对于其当前朝向。
[右 v] 转 (90) 度 ▶
参数 |
描述 |
|---|---|
方向 |
无人机的转向方向:向右或向左。 |
角度 |
无人机移动的角度,以整数或小数表示,范围从 0 到 359 度。 |
不要等待 |
选择箭头(▶)展开代码块,显示“不要等待”,这样堆栈中的下一个代码块就会立即运行。 |
示例
当开始
[Turn around, then land.]
起飞至 [500] [毫米 v] ▶
[右 v] 转 [180] 度 ▶
土地 ▶
转向航向#
转向航向堆栈块使用当前的转弯速度将无人机转向特定航向。
归位至 (270) 度 ▶
参数 |
描述 |
|---|---|
标题 |
无人机转向的航向范围为 0 到 359 度。 |
不要等待 |
选择箭头(▶)展开代码块,显示“不要等待”,这样堆栈中的下一个代码块就会立即运行。 |
示例
当开始
[Turn to face each of the cardinal headings.]
起飞至 [500] [毫米 v] ▶
归位至 (90) 度 ▶
等待 [1] 秒
归位至 (180) 度 ▶
等待 [1] 秒
归位至 (270) 度 ▶
等待 [1] 秒
归位至 (0) 度 ▶
等待 [1] 秒
土地 ▶
使用控制器移动#
“使用控制器移动”堆栈模块允许您使用 VEX AIR 无人机控制器来控制无人机。此模块必须在循环中使用才能持续控制无人机。如果循环停止且没有其他模块指示无人机移动,无人机将继续沿其最后移动的方向飞行。
使用遥控器移动
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[Move with controller until button 7 is pressed.]
起飞至 [500] [毫米 v] ▶
重复直到 <遥控器按键 [7 v] 按下了?>
使用遥控器移动
结束
土地 ▶
飞行控制#
设置转向 POV#
设置转向 POV 堆栈块设置无人机转向时使用的视角。
将转向 POV 设置为 [标准 v]
参数 |
描述 |
|---|---|
风格 |
设置用于控制无人机的视角。标准 表示无人机的移动基于其当前朝向。无头 表示无人机的移动基于项目开始时的朝向。 |
例子
当开始
[Steer based on the drone's starting orienation until button 7 is pressed.]
起飞至 [500] [毫米 v] ▶
将转向 POV 设置为 [无头 v]
重复直到 <遥控器按键 [7 v] 按下了?>
使用遥控器移动
结束
土地 ▶
设定动作#
设置移动方式 堆栈块用于设置无人机的移动方式。
这种运动方式用于使用控制器驾驶无人机时。
将移动设置为 [精确 v]
参数 |
描述 |
|---|---|
风格 |
设置无人机的操控模式:
|
例子
当开始
[Control the drone with the balanced movement style.]
起飞至 [500] [毫米 v] ▶
将移动设置为 [均衡 v]
重复直到 <遥控器按键 [7 v] 按下了?>
使用遥控器移动
结束
土地 ▶
设置#
设定爬升速度#
设置攀爬速度 堆叠模块用于设置默认攀爬速度(以百分比表示)。这将影响其后所有与攀爬相关的模块。默认攀爬速度为 50%。
set climb velocity to [100] %
参数 |
描述 |
|---|---|
速度 |
无人机爬升速度的百分比。 |
例子
当开始
[Raise the drone quickly before landing.]
起飞至 [300] [毫米 v] ▶
等待 [1] 秒
set climb velocity to [100] %
爬升 [向上 v] 获得 (500) [毫米 v] ▶
土地 ▶
设置移动速度#
设置移动速度 堆栈块用于设置默认移动速度,单位为百分比。这将影响后续所有与移动相关的代码块。默认移动速度为 50%。
set move velocity to [100] %
参数 |
描述 |
|---|---|
速度 |
无人机移动的速度(以百分比表示)。 |
例子
当开始
[Move forward quickly, then reverse slowly.]
起飞至 [500] [毫米 v] ▶
set move velocity to [100] %
将 [向前 v] 移至 [500] [毫米 v] ▶
等待 (1) 秒
set move velocity to [20] %
将 [反 v] 移至 [500] [毫米 v] ▶
土地 ▶
设置转弯速度#
设置转向速度 堆栈块用于设置默认转向速度,单位为百分比。这将影响后续所有与转向相关的模块。默认转向速度为 50%。
set turn velocity to [100] %
参数 |
描述 |
|---|---|
速度 |
无人机转弯的速度(以百分比表示)。 |
例子
当开始
[Turn clockwise quickly, then counterclockwise slowly.]
起飞至 [500] [毫米 v] ▶
set turn velocity to [100] %
[右 v] 转 [360] 度 ▶
等待 (1) 秒
set turn velocity to [20] %
[左 v] 转 [360] 度 ▶
土地 ▶
位置#
位置#
位置报告模块会以整数形式报告无人机的当前 x、y 或 z 坐标。在项目开始时,无人机的当前位置会自动设置为 (0, 0, 0)。
[X v] 转位 [毫米 v]
参数 |
描述 |
|---|---|
轴 |
应该报告哪个坐标轴的坐标:
|
单位 |
计量单位:mm(毫米)或英寸。 |
例子
当开始
[Fly to position (0, 300, 500).]
起飞至 [500] [毫米 v] ▶
等待 [1] 秒
移动 [向前 v]
等到 <([y v] 转位 [毫米 v]) [math_greater_than v] [300]>
徘徊
等待 [1] 秒
土地 ▶
获取最大 z 高度#
获取最大 z 轴高度 报告模块报告无人机可以达到的最大高度。
(get max z height in [mm v])
参数 |
描述 |
|---|---|
单位 |
计量单位:mm(毫米)或英寸。 |
例子
当开始 :: hat events
[Display the new z height limit.]
在屏幕上打印 (get max z height in [mm v])▶
在屏幕上设定光标至下一行
起飞至 [500] [毫米 v] ▶
将最大 z 高度设置为 [1000] ( [毫米 v]
在屏幕上打印 (get max z height in [mm v])▶
等待 [1] 秒
土地 ▶
设置最大 z 高度#
设置最大 Z 轴高度 堆栈块设置无人机飞行高度的上限。
将最大 z 高度设置为 [2500] ( [毫米 v]
参数 |
描述 |
|---|---|
最大 z 高度 |
无人机不会飞越的最大 z 轴值(整数或小数),范围为 1000 至 5000 毫米或 40 至 196 英寸。 |
单位 |
计量单位:mm(毫米)或英寸。 |
例子
当开始
[Fly with controller under 1000 mm.]
将最大 z 高度设置为 [1000] ( [毫米 v]
起飞至 (500) [毫米 v] ▶
重复直到 <遥控器按键 [7 v] 按下了?>
使用遥控器移动
结束
土地 ▶
设置位置#
设置位置堆栈块将无人机的当前 x、y 或 z 坐标设置为指定值。
设定 [X v] 转位至 [0] [毫米 v]
参数 |
描述 |
|---|---|
轴 |
设置位置的坐标轴:
|
协调 |
要设置的新位置值。 |
单位 |
计量单位:mm(毫米)或英寸。 |
例子
当开始
[Set a new z position, then fly to z position -300.]
起飞至 [800] [毫米 v] ▶
设定 [z v] 转位至 [0] [毫米 v]
等待 [1] 秒
爬升 [向下 v]
等到 <([z v] 转位 [毫米 v]) [math_less_than v] [-300]>
徘徊
等待 [1] 秒
土地 ▶
价值观#
飞行状态#
飞行状态布尔模块报告无人机是否处于指定的飞行状态。
正确 — 无人机处于指定状态。
错误 — 无人机未处于指定状态。
<飞行状态为 [motors off v]?>
参数 |
描述 |
|---|---|
状态 |
飞行状态检查:
|
例子
当开始
[Report the flight status as the drone takes off.]
在屏幕上打印 [Preparing for flight!]◀ 并设定光标为下一行
起飞至 [800] %2 ◀ 并且不等待
等到 <flight state is [motor start v]>
在屏幕上打印 [Motors starting...]◀ 并设定光标为下一行
等到 <flight state is [flight v]>
在屏幕上打印 [Take off!]▶
安全模式#
安全模式布尔块报告无人机上的螺旋桨锁定是否已启用。
正确 — 螺旋桨锁定已启用。
错误 — 螺旋桨锁定功能未启用。
<安全模式?>
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[Change the sound by enabling the Propeller Lock.]
永久循环
如果 <安全模式?> 那么
播放声音 [过错 v]
否则
播放声音 [成功 v]
攀岩活动#
climb active 布尔块报告无人机是否正在爬升。
正确 — 无人机目前正在爬升。
错误 — 无人机没有爬升。
<主动攀爬?>
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[After the drone starts to climb, play a sound and land.]
起飞至 [500] [毫米 v] ▶
爬升 [向上 v]
等待 [1] 秒
如果 <主动攀爬?> 那么
播放声音 [循环 v] ▶
土地 ▶
移动活跃#
move active 布尔块报告无人机当前是否正在使用移动块。
正确 — 无人机目前正在使用移动模块。
错误 — 无人机当前未使用移动方块。
<活动起来?>
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[After the drone starts to move, play a sound and land.]
起飞至 [500] [毫米 v] ▶
移动 [向前 v]
等待 [1] 秒
如果 <活动起来?> 那么
播放声音 [循环 v] ▶
土地 ▶
激活#
turn active 布尔块报告无人机是否正在转弯。
正确 — 无人机目前正在转弯。
错误 — 无人机没有转弯。
<變得活動?>
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[After the drone starts to turn, play a sound and land.]
起飞至 (500) [毫米 v] ▶
[右 v] 转
等待 [1] 秒
如果 <變得活動?> 那么
播放声音 [检测到 v] ▶
土地 ▶
悬停#
悬停布尔块报告无人机是否保持其位置(悬停)。
正确 — 无人机目前保持其位置(悬停)。
错误 — 无人机目前正在改变位置。
<徘徊?>
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[Play a sound after the drone has finished taking off.]
起飞至 [700] [毫米 v] ▶
等到 <徘徊?>
等待 [2] 秒
播放声音 [暂停 v] ▶
土地 ▶
起飞#
起飞布尔块报告无人机是否正在起飞过程中。
正确 — 无人机目前正在起飞过程中。
错误——无人机并未处于起飞过程中。
<起飞?>
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[Play sounds while the drone is taking off.]
起飞至 [700] %2 ◀ 并且不等待
等待 [1] 秒
当 <起飞?>
播放声音 [传感 v] ▶
降落#
着陆布尔块报告无人机是否正在着陆过程中。
正确 — 无人机目前正在着陆过程中。
错误——无人机并未正在着陆。
<降落?>
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[Play sounds while the drone is landing.]
起飞至 (500) [毫米 v] ▶
等待 [1] 秒
土地 ◀ 并且不等待
等待 [1] 秒
当 <降落?>
播放声音 [循环 v] ▶
登陆#
landed 布尔块报告无人机是否已着陆。
正确——无人机已着陆。
错误——无人机尚未着陆。
<登陆?>
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[Celebrate a successful landing.]
起飞至 (500) [毫米 v] ▶
等待 (1) 秒
土地 ▶
如果 <landed> 那么
播放声音 [成功 v] ▶