传感器#
介绍#
VEX AIR 无人机内置惯性传感器,用于测量旋转运动和检测运动变化,以及测距传感器,用于测量距离。VEX AIR 无人机还可以跟踪电池电量。这些传感器使无人机能够追踪其方向、航向、加速度以及与物体的距离。
以下是所有可用块的列表:
惯性 - 跟踪无人机的旋转运动。
rotation — 返回无人机自启动以来转动的幅度。
heading — 返回无人机的航向角(0 到 359.99 度)。
orientation — 返回无人机的横滚、俯仰或偏航(-180.00 到 180.00 度)。
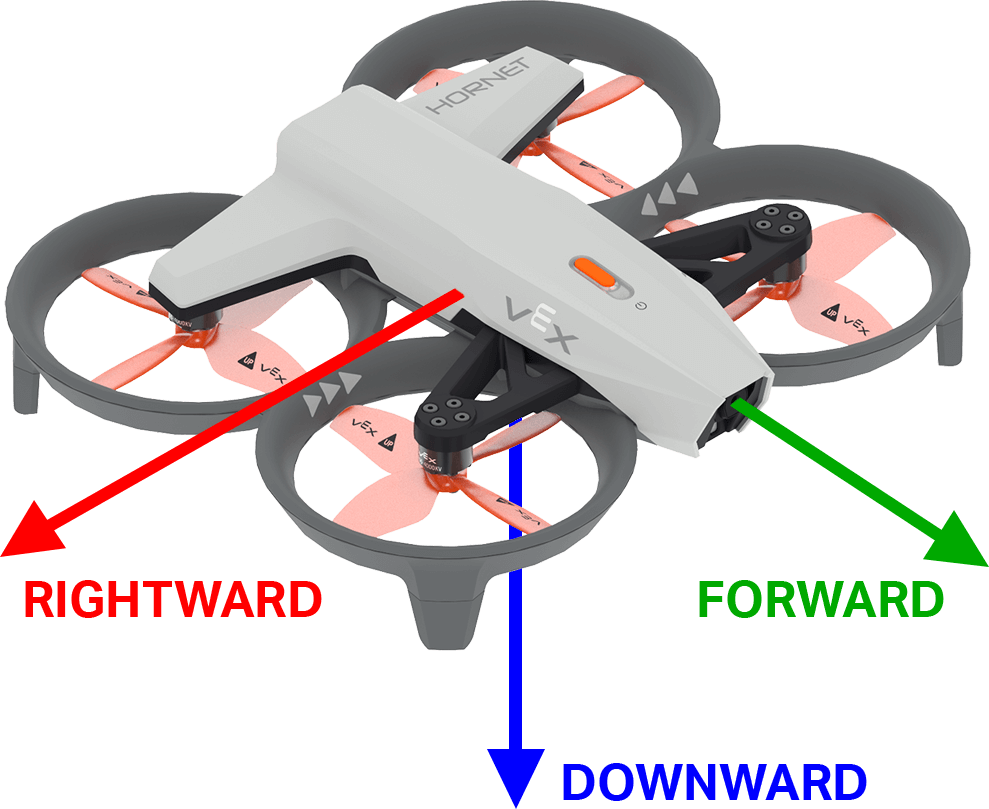
加速度 — 返回沿向前、向右或向下轴向上的加速度。
获取转弯速率 — 返回无人机当前的旋转速度(以度/秒 \(dps\) 为单位)。
重置旋转 — 将旋转值重置为零。
重置航向(#reset-heading)——将航向值重置为零。
测距范围 — 通过无人机的测距传感器检测距离。
距离 — 报告所选测距传感器与最近检测到的物体之间的距离。
电池 - 返回无人机的电池电量。
电池电量 — 以百分比返回无人机的电池电量。
惯性#
旋转#
旋转 模块返回无人机自启动以来旋转了多少度。它会将所有旋转角度相加,并以度数形式返回总旋转角度:正数表示顺时针,负数表示逆时针。
(转向角度值)
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[Display the rotation after turning.]
起飞至 [500] [毫米 v] ▶
[左 v] 转 (450) 度 ▶
在控制台上打印 (转向角度值)▶
土地 ▶
标题#
heading 块返回无人机的航向角。它返回 0 到 359.99 度范围内的十进制数。
(归位角度值)
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[Display the rotation after turning left.]
起飞至 [500] [毫米 v] ▶
[左 v] 转 (90) 度 ▶
在屏幕上打印 (归位角度值)▶
方向#
orientation 块以十进制数返回无人机在 -180.00 到 180.00 度范围内的滚动、俯仰或偏航。
下图使用箭头表示滚动、俯仰、偏航的正旋转方向。
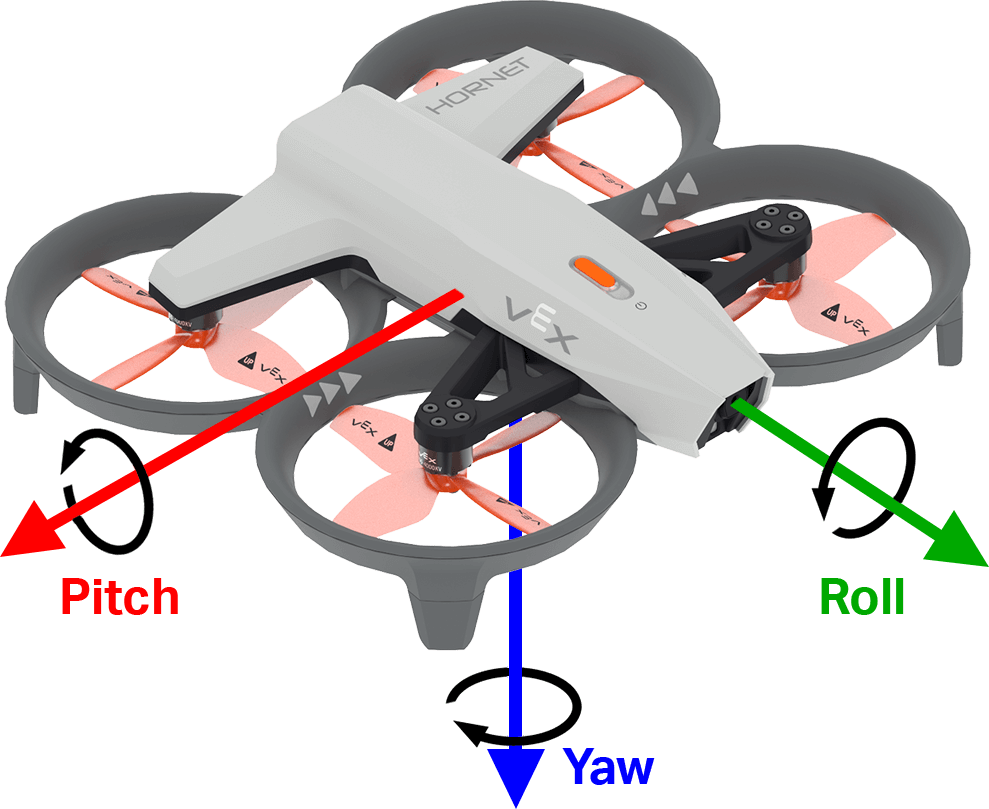
[横滚 v] 偏转角度值
参数 |
描述 |
|---|---|
轴 |
方向轴:
|
例子
当开始
[Display the drone orientation as it is rotated by hand.]
永久循环
清屏
在屏幕上设定光标至 (7) 行 (1) 列
在屏幕上打印 [Roll:]▶
在屏幕上打印 ([横滚 v] 偏转角度值)▶
结束
加速度#
加速度 模块返回无人机在指定方向上的加速度。返回值表示速度变化率,以 g 为单位(1g ≈ 9.81 m/s²),取值范围为 -4.00 到 4.00。
下图用箭头表示向前和向右的正加速度方向,向下的负加速度方向。
([向前 v] 轴加速度值\(g\) :: custom-controller-inertial-timer)
参数 |
描述 |
|---|---|
轴 |
返回加速度的轴:
|
例子
当开始
[Display the acceleration as the drone takes off.]
起飞至 [500] %2 ◀ 并且不等待
永久循环
清屏
在屏幕上设定光标至 [1] 行 [1] 列
在屏幕上打印 ([向下 v] 轴加速度值\(g\))▶
等待 [0.5] 秒
结束
获取转弯率#
获取转弯速率 块返回无人机沿指定轴旋转的速率。它将返回以度/秒 \(dps\) 为单位的整数值。
下图使用箭头表示滚动、俯仰、偏航的正旋转方向。
([横滚 v] 轴角速度\(dps\))
参数 |
描述 |
|---|---|
轴 |
返回转弯速率的轴:
|
例子
当开始
[Display the drone turn rate as it is rotated by hand.]
永久循环
清屏
在屏幕上设定光标至 (7) 行 (1) 列
在屏幕上打印 [Roll:]▶
在屏幕上打印 ([横滚 v] 轴角速度\(dps\))▶
结束
重置旋转#
重置旋转块将无人机的旋转值重置为 0 度。
重置转向角度值
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[Display the rotation after resetting.]
起飞至 [500] [毫米 v] ▶
[右 v] 转
等到 <(转向角度值) [math_greater_than v] [360]>
徘徊
重置转向角度值
等待 [1] 秒
在控制台上打印 (转向角度值)▶
重置标题#
重置航向块将无人机的航向重置为零度。
重置航向角度值
参数 |
描述 |
|---|---|
该块没有参数。 |
例子
当开始
[Turn to the same heading before and after resetting.]
起飞至 [500] [毫米 v] ▶
归位至 [90] 度 ▶
等待 [1] 秒
重置航向角度值
归位至 [90] 度 ▶
等待 [1] 秒
土地 ▶
范围#
距离#
距离报告模块报告所选测距传感器与最近检测到的物体之间的距离。
(distance [forward v] range in [mm v])
参数 |
描述 |
|---|---|
范围 |
可使用的测距传感器:前向或下向。前向测量无人机前方距离。下向测量无人机底部距离。 |
单位 |
距离单位:毫米或英寸。 |
例子
当开始
[Hover at 200 mm.]
起飞至 [500] [毫米 v] ▶
爬升 [向下 v]
等到 <(distance [downward v] range in [mm v]) [math_less_than v] [200]>
徘徊
等待 (3) 秒
土地 ▶
电池#
电池电量#
电池电量 模块以百分比形式返回无人机的电池电量。返回值范围为 0 到 100。
(无人机电池电量百分比)
参数 |
描述 |
|---|---|
该块没有参数。 |
当开始
[Display the battery level.]
在屏幕上打印 (无人机电池电量百分比)▶