Controlador#
Introducción#
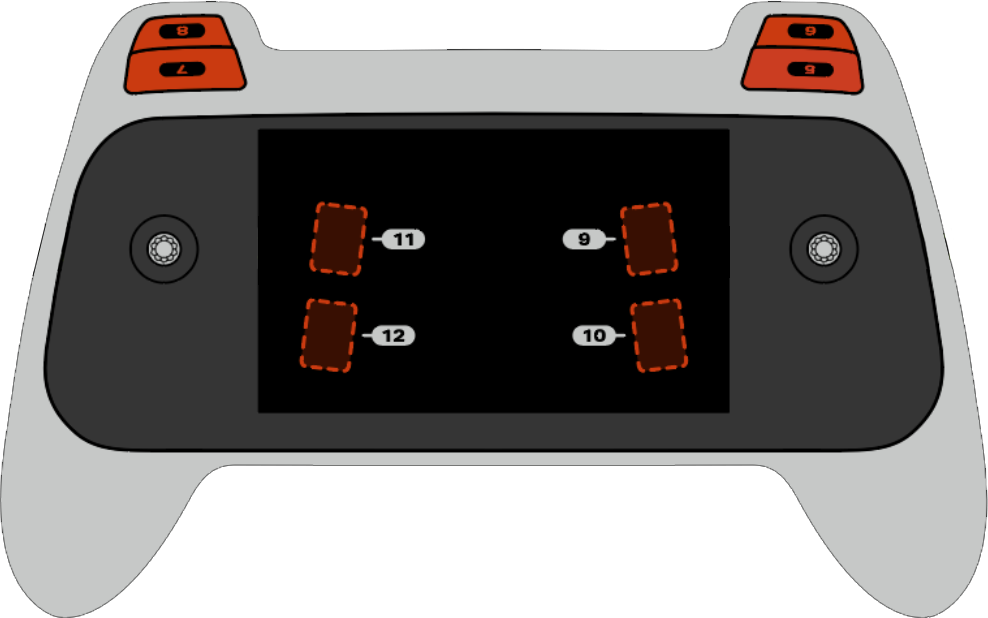
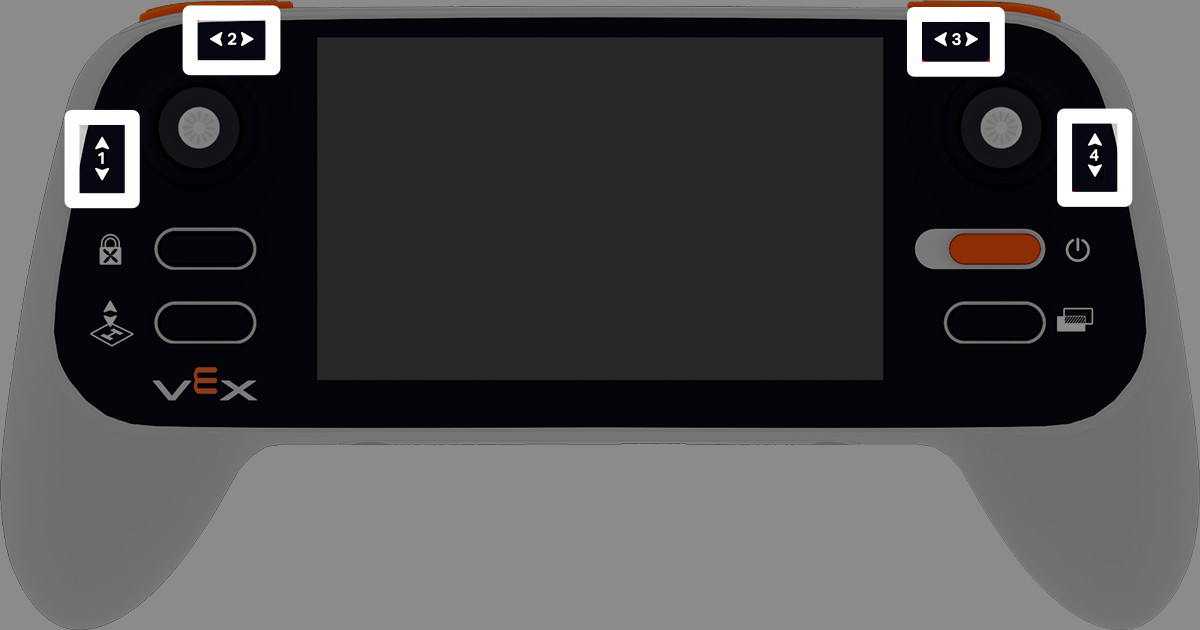
El controlador de drones VEX AIR cuenta con 12 botones y dos joysticks. Estas entradas permiten que el dron detecte las pulsaciones de los botones y los movimientos del joystick, lo que permite un control interactivo y ágil.
A continuación se muestra una lista de todos los bloques disponibles:
botón del controlador presionado — Comprueba si se está presionando un botón específico en ese momento.
posición del eje del controlador — Informa la posición del joystick a lo largo de un eje especificado.
controlador conectado — Informa si el controlador está conectado al dron.
nivel de batería del controlador — Informa el nivel de batería del controlador.
cuando se presiona el botón del controlador — Ejecuta una pila de bloques cuando se presiona o suelta un botón.
cuando se cambia el eje del controlador — Ejecuta la pila adjunta cuando la posición de un joystick cambia a lo largo del eje seleccionado.
Botón del mando pulsado#
El bloque booleano botón del mando pulsado indica si se está pulsando un botón específico del mando.
Verdadero — Se está pulsando el botón especificado.
Falso — El botón especificado no se está pulsando.
<¿Botón del controlador [5 v] presionado?>
Parámetros |
Descripción |
|---|---|
botón |
El botón para comprobar si se ha pulsado, va del 5 al 12. |
Ejemplo
cuando empezó
[Take a picture when button 5 is pressed.]
despegar a [500] [mm v] ▶
para siempre
moverse con el controlador
si <¿Botón del controlador [5 v] presionado?> entonces
capturar imagen en cámara [adelante v]
fin
fin
posición del eje del controlador#
El bloque de informe de posición del eje del controlador informa la posición del eje del joystick especificado. Este informa un número entero entre -100 y 100.
(posición del eje [1 v] del controlador)
Parámetros |
Descripción |
|---|---|
eje |
Eje para informar la posición de:
|
Ejemplo
cuando empezó
[Climb when the left joystick is moved up.]
despegar a [500] [mm v] ▶
para siempre
si <(posición del eje [1 v] del controlador) [math_greater_than v] [0]> entonces
subir [arriba v]
demás
flotar
fin
El controlador está conectado#
El bloque booleano controlador conectado indica si el controlador está conectado al dron.
Verdadero — El controlador está conectado.
Falso — El controlador no está conectado.
<¿El controlador está conectado al dron?>
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Print controller connection status on screen.]
para siempre
si <¿El controlador está conectado al dron?> entonces
pantalla clara
Coloque el cursor en la fila (1) columna (1) en la pantalla
imprimir [Controller connected] en la pantalla ▶
esperar (0.5) segundos
fin
fin
nivel de batería del controlador#
El bloque de informe nivel de batería del controlador informa el nivel de batería del controlador, como un porcentaje del 0% al 100%.
(nivel de batería del controlador en %)
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Show controller's battery level.]
si <(nivel de batería del controlador en %) [math_greater_than v] [50]> entonces
imprimir [Battery level ok] en la pantalla ▶
demás
imprimir [Battery level low] en la pantalla ▶
cuando el botón del controlador#
El bloque de sombrero cuando se presiona o se suelta el botón del controlador ejecuta la pila de bloques adjunta cuando se presiona o se suelta el botón.
cuando el botón del controlador [5 v] [presionado v]
Parámetros |
Descripción |
|---|---|
botón |
Determina qué botón activará el evento, con un rango de 5 a 12. |
acción |
Determina cuándo se ejecutará la pila de bloques adjunta: pressed se ejecutará cuando se presione un botón, y released se ejecutará cuando se suelte un botón. |
Ejemplo
cuando empezó
despegar a [500] [mm v] ▶
para siempre
moverse con el controlador
fin
cuando el botón del controlador [5 v] [presionado v]
[Take a picture when button 5 is pressed.]
capturar imagen en cámara [adelante v]
cuando se cambia el eje del controlador#
El bloque de código cuando se cambia el eje del controlador ejecuta la pila adjunta cuando la posición de un joystick cambia a lo largo del eje seleccionado.
cuando se cambia el eje [1 v] del controlador
Parámetros |
Descripción |
|---|---|
eje |
Eje a monitorizar para detectar cambios:
|
Ejemplo
cuando empezó
[Move forward when the left joystick moves.]
despegar a [500] [mm v] ▶
cuando se cambia el eje [1 v] del controlador
mover [adelante v] por (200) [mm v] ▶