Sensores#
Introducción#
El dron VEX AIR incluye un sensor inercial para medir el movimiento de rotación y detectar cambios de movimiento, así como un sensor de alcance para medir distancias. El dron VEX AIR también puede monitorizar el nivel de batería. Estos sensores permiten al dron rastrear su orientación, rumbo, aceleración y distancia a los objetos.
A continuación se muestra una lista de todos los bloques disponibles:
Inercial: rastrea el movimiento de rotación del dron.
rotación — Devuelve cuánto ha girado el dron desde que comenzó.
heading — Devuelve el ángulo de rumbo del dron (0 a 359,99 grados).
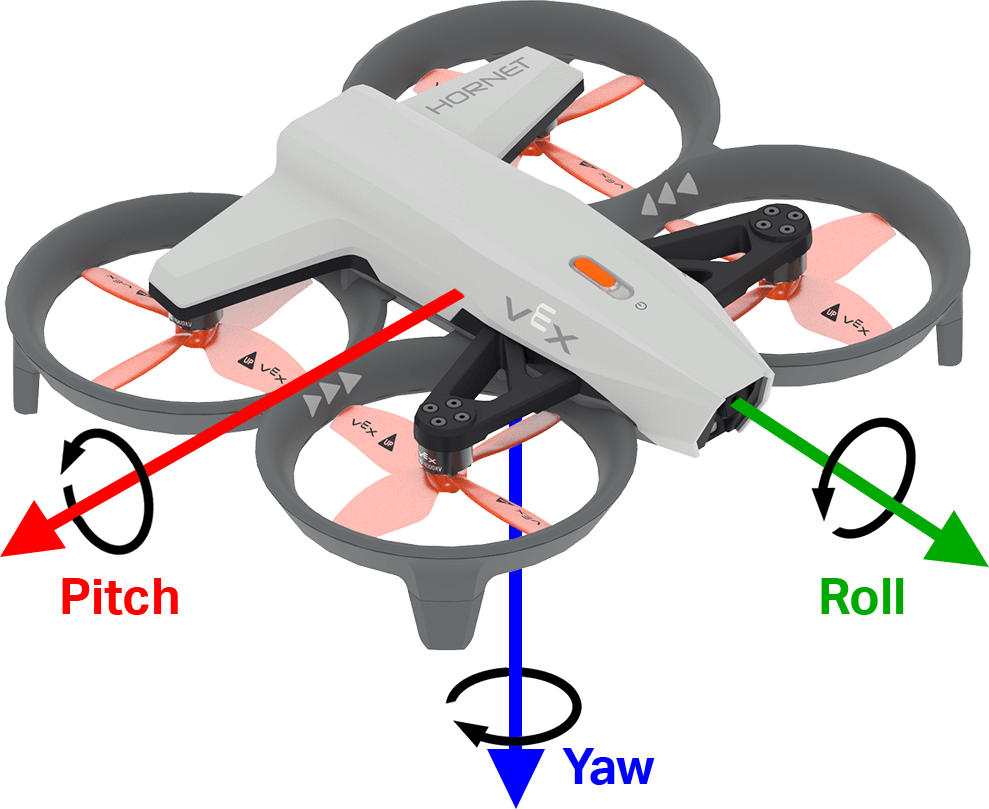
orientación — Devuelve el balanceo, cabeceo o guiñada del dron (–180,00 a 180,00 grados).
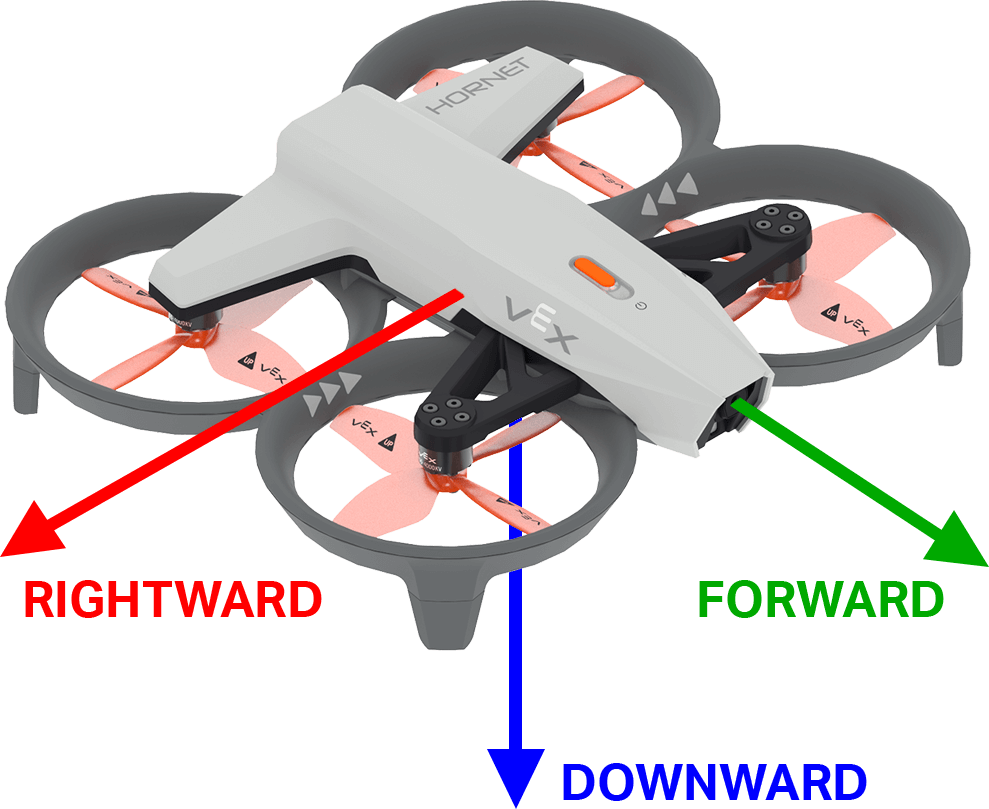
aceleración — Devuelve la aceleración a lo largo del eje hacia adelante, hacia la derecha o hacia abajo.
obtener velocidad de giro — Devuelve la velocidad de rotación actual del dron en grados por segundo \(dps\).
reset rotation — Restablece el valor de rotación a cero.
reset heading — Restablece el valor del rumbo a cero.
Alcance: Detecta distancias mediante los sensores de alcance del dron.
distancia — Informa la distancia entre el sensor de rango seleccionado y el objeto detectado más cercano.
Batería - Devuelve el nivel de batería del dron.
nivel de batería — Devuelve el nivel de batería del dron en porcentaje.
Inercial#
rotación#
El bloque rotación devuelve cuántos grados ha girado el dron desde que empezó. Suma todos los giros y devuelve el total en grados: positivo para sentido horario, negativo para sentido antihorario.
(rotación en grados)
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Display the rotation after turning.]
despegar a [500] [mm v] ▶
girar [izquierda v] por (450) grado ▶
imprimir (rotación en grados) en la consola ▶
tierra ▶
título#
El bloque rumbo devuelve el ángulo de rumbo del dron. Este devuelve un número decimal entre 0 y 359,99 grados.
(rumbo en grados)
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Display the rotation after turning left.]
despegar a [500] [mm v] ▶
girar [izquierda v] por (90) grado ▶
imprimir (rumbo en grados) en la pantalla ▶
orientación#
El bloque orientación devuelve el balanceo, cabeceo o guiñada del dron en el rango de –180,00 a 180,00 grados como un número decimal.
La imagen a continuación utiliza flechas para mostrar la dirección de rotación positiva para balanceo, cabeceo y guiñada.
orientación de [rollo v] en grados
Parámetros |
Descripción |
|---|---|
eje |
El eje de orientación:
|
Ejemplo
cuando empezó
[Display the drone orientation as it is rotated by hand.]
para siempre
pantalla clara
Coloque el cursor en la fila (7) columna (1) en la pantalla
imprimir [Roll:] en la pantalla ▶
imprimir (orientación de [rollo v] en grados) en la pantalla ▶
fin
aceleración#
El bloque aceleración devuelve la aceleración del dron en una dirección específica. El valor devuelto representa la tasa de cambio de velocidad, medida en unidades de g (donde 1 g ≈ 9,81 m/s²), como un número entre -4,00 y 4,00.
La imagen a continuación utiliza flechas para mostrar la dirección de la aceleración positiva hacia adelante y hacia la derecha, y la aceleración negativa hacia abajo.
(aceleración del eje [adelante v] en g :: custom-controller-inertial-timer)
Parámetros |
Descripción |
|---|---|
eje |
El eje para devolver la aceleración de:
|
Ejemplo
cuando empezó
[Display the acceleration as the drone takes off.]
despegar a [500] %2 ◀ y no esperes
para siempre
pantalla clara
Coloque el cursor en la fila [1] columna [1] en la pantalla
imprimir (aceleración del eje [hacia abajo v] en g) en la pantalla ▶
esperar [0.5] segundos
fin
obtener velocidad de giro#
El bloque obtener velocidad de giro devuelve la velocidad a la que el dron gira sobre el eje especificado. Esto devuelve un valor entero en grados por segundo \(dps\).
La imagen a continuación utiliza flechas para mostrar la dirección de rotación positiva para balanceo, cabeceo y guiñada.
(Obtener la velocidad de giro del eje [rollo v] en dps)
Parámetros |
Descripción |
|---|---|
eje |
El eje para devolver la velocidad de giro de:
|
Ejemplo
cuando empezó
[Display the drone turn rate as it is rotated by hand.]
para siempre
pantalla clara
Coloque el cursor en la fila (7) columna (1) en la pantalla
imprimir [Roll:] en la pantalla ▶
imprimir (Obtener la velocidad de giro del eje [rollo v] en dps) en la pantalla ▶
fin
restablecer rotación#
El bloque reiniciar rotación restablece el valor de rotación del dron a 0 grados.
restablecer rotación
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Display the rotation after resetting.]
despegar a [500] [mm v] ▶
turno [derecha v]
esperar hasta <(rotación en grados) [math_greater_than v] [360]>
flotar
restablecer rotación
esperar [1] segundos
imprimir (rotación en grados) en la consola ▶
restablecer el rumbo#
El bloque reiniciar rumbo restablece el rumbo del dron a cero grados.
restablecer el encabezado
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Turn to the same heading before and after resetting.]
despegar a [500] [mm v] ▶
girar hacia el rumbo [90] grados ▶
esperar [1] segundos
restablecer el encabezado
girar hacia el rumbo [90] grados ▶
esperar [1] segundos
tierra ▶
Rango#
distancia#
El bloque de informe de distancia informa la distancia entre el sensor de rango seleccionado y el objeto detectado más cercano.
(distance [forward v] range in [mm v])
Parámetros |
Descripción |
|---|---|
rango |
Sensor de alcance a utilizar: hacia adelante o hacia abajo. Hacia adelante informa la distancia desde la parte frontal del dron. Hacia abajo informa la distancia desde la parte inferior del dron. |
unidades |
La unidad de distancia: mm o pulgadas. |
Ejemplo
cuando empezó
[Hover at 200 mm.]
despegar a [500] [mm v] ▶
subir [abajo v]
esperar hasta <(distance [downward v] range in [mm v]) [math_less_than v] [200]>
flotar
esperar (3) segundos
tierra ▶
Batería#
nivel de batería#
El bloque nivel de batería devuelve el nivel de carga de la batería del dron en porcentaje. Esto devuelve un número del 0 al 100.
(nivel de batería del dron en %)
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
cuando empezó
[Display the battery level.]
imprimir (nivel de batería del dron en %) en la pantalla ▶