Castle Crasher#
Castle Crasher is a Free Playground where the goal is to knock down all of the castle objects on the field.
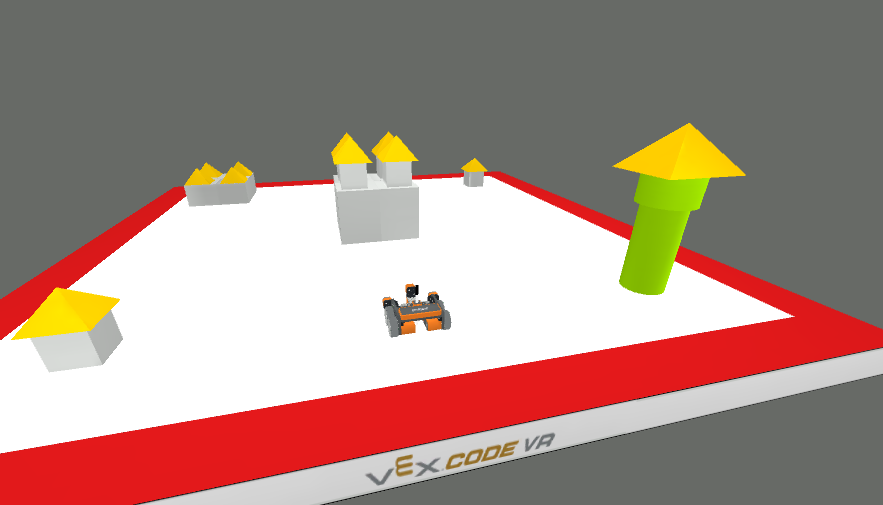
Playground Overview#
Goal: Knock down all of the castle objects on the field.
Starting position:
(0, -800)Map size:
2000 x 2000 mm
Robot Overview#
Castle Crasher uses the Standard VR Robot.