Disk Transport#
Disk Transport is a Free Playground where the goal is to navigate around a castle, pick up Disks with the Electromagnet, and sort them into their matching color zones.
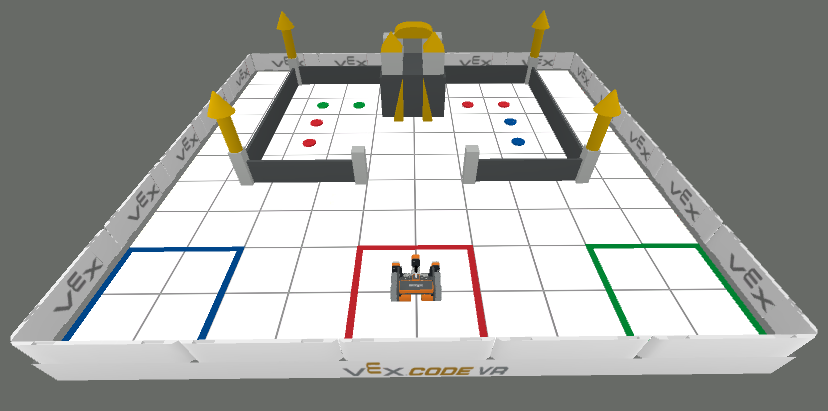
Playground Overview#
Goal: Navigate around a castle, pick up Disks with the Electromagnet, and sort them into their matching color zones.
Starting position:
(0, -800)Map size:
2000 x 2000 mm
Robot Overview#
Disk Transport uses the Standard VR Robot.