IQ Pitching In (Fling)#
Fling is the VEX IQ Hero Bot used in the VIQRC 21-22 Pitching In Playground.
Robot Overview#
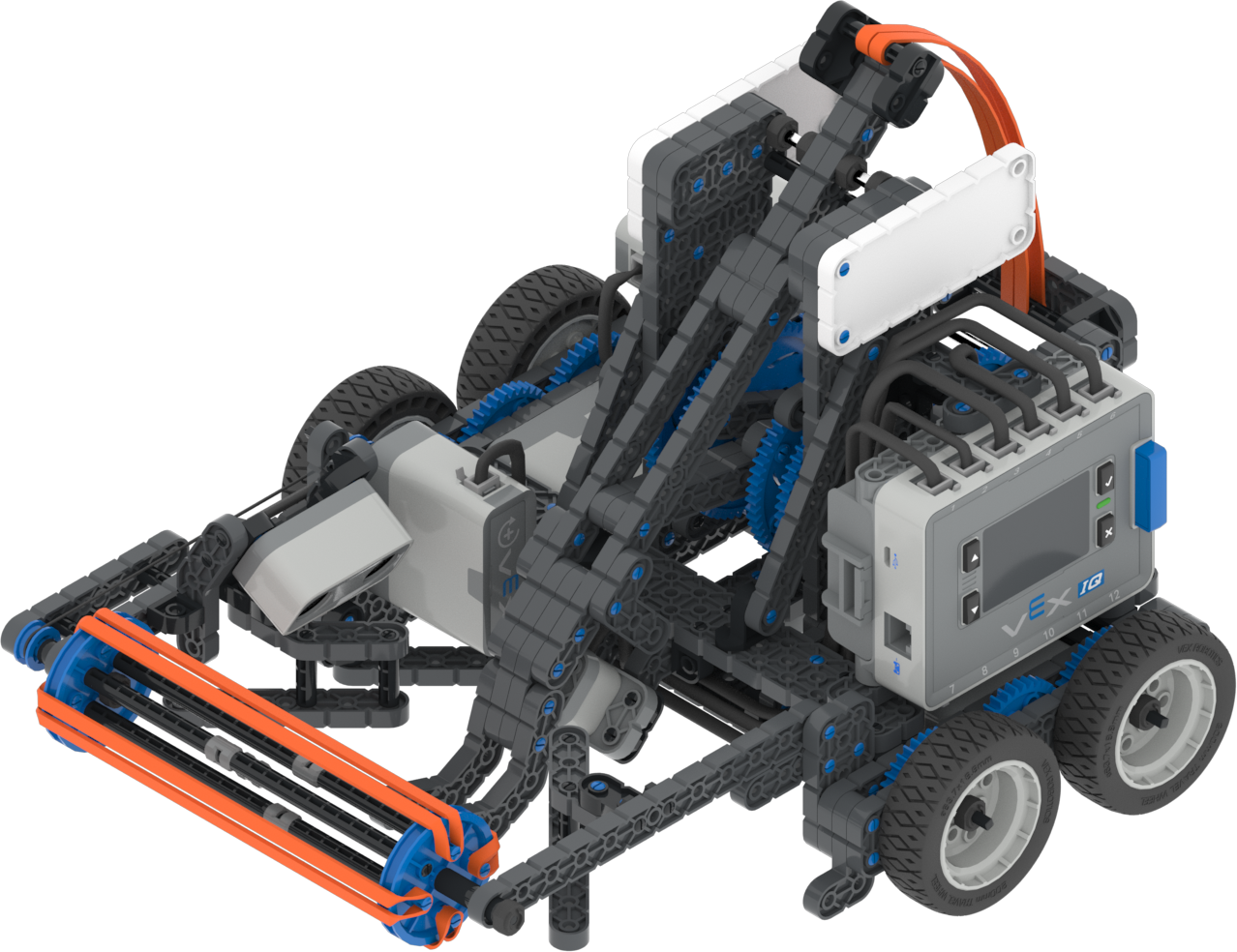
Fling supports standard VR controls and sensors such as the Brain Timer, with additional Fling-specific features covered in Robot-Specific Blocks and Robot-Specific Python.
Motors#
Configuration & |
Description |
|---|---|
|
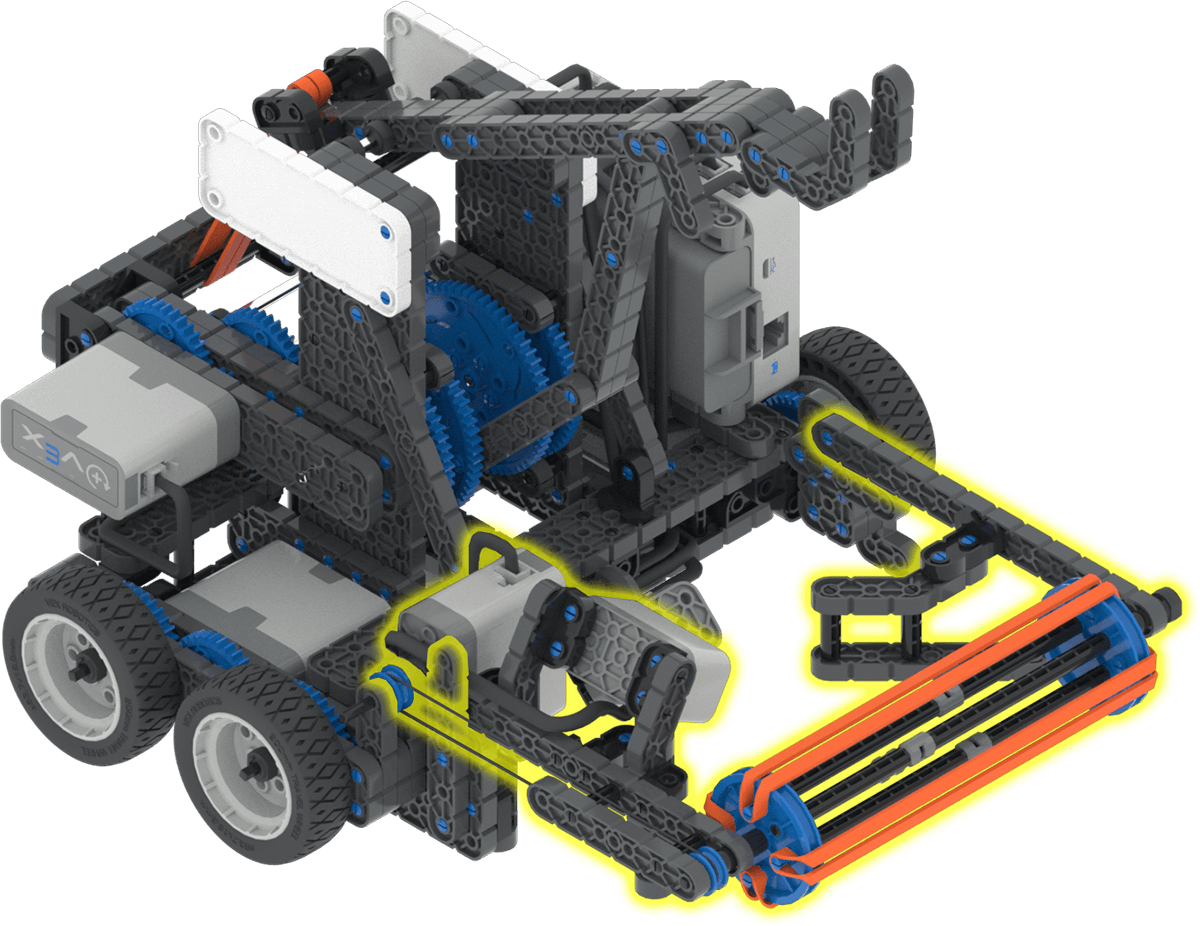
The intake allows the robot to take in Balls to be launched by the catapult arm, or reverse the intake to spin Balls out and away from the intake. The intake motor starts at 0 degrees and will collect a Ball when spun forward for 180 degrees, and eject a Ball when spun in reverse for 180 degrees. |
|
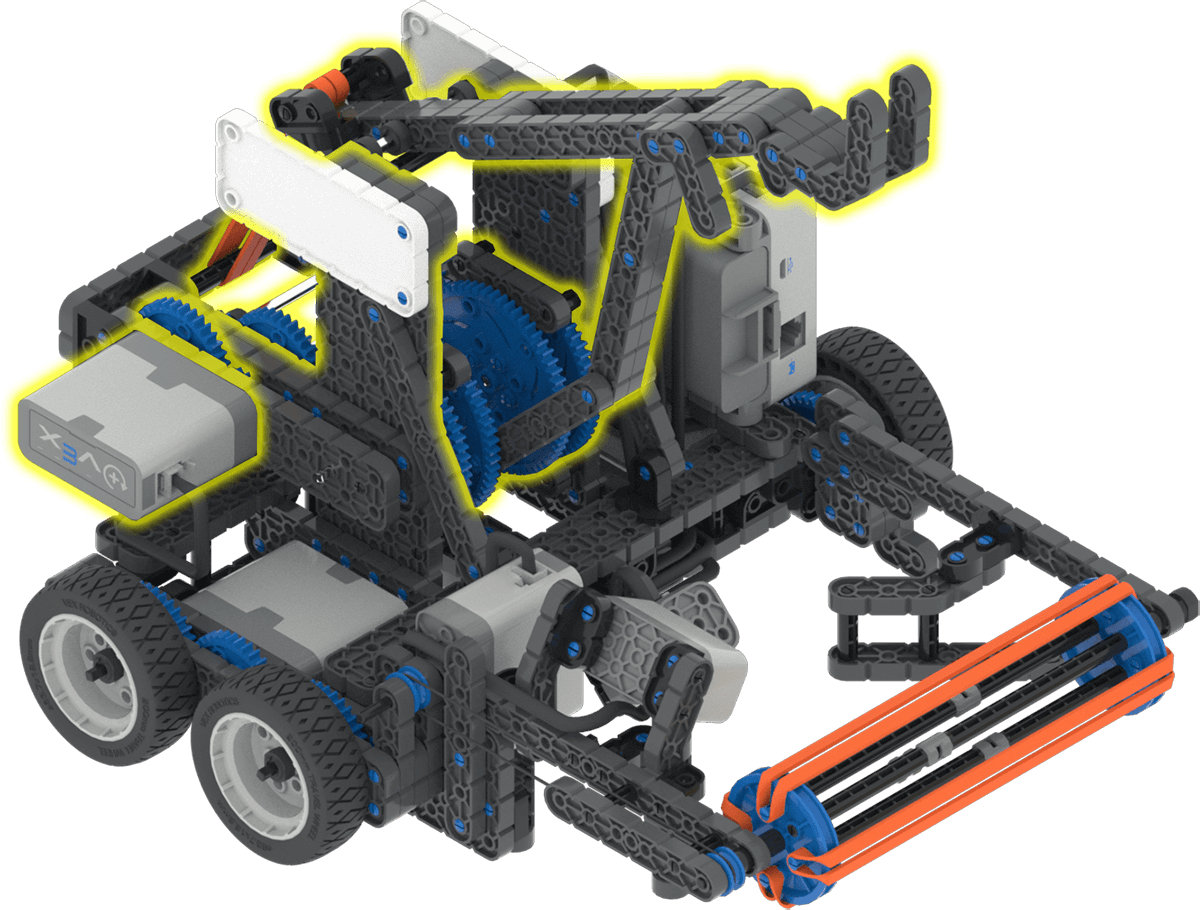
The catapult motor allows the robot to launch Balls into goals and score a low hang from the Hanging Bar. The catapult motor starts at 0 degrees in the raised position. The catapult arm is level at 2600 degrees and all the way down at 5000 degrees. |
|
The catapult arm tension motor allows the robot to launch Balls different distances across the field. The default tension is set to 90 degrees. |
Components and Features#
Component or Feature |
Use |
API Documentation |
|---|---|---|
Drivetrain |
Moves and turns the robot. |
|
Catapult Intake Motor |
Launches Balls that the robot has picked up. |
|
Catapult Motor |
Raises and lowers the arm. This allows the robot to release Balls from some of the dispensers and reach over the barrier to touch the contact zone at the end of a match. |
|
Catapult Arm Tension Motor |
Allows the robot to launch Balls different distances across the field. |
|
Bumper Switch |
Detects when a Ball is loaded in the Intake. |
|
Color Sensor |
Detects the color of Balls. |
|
Distance Sensor |
Detects how far a Ball is from the front of the robot. |
|
Brain Timer |
Tracks elapsed time since the project started. |
Playgrounds#
Playground |
Description |
|---|---|
Collect and launch Balls in the VIQRC 21-22 Virtual Skills field. |