智商提升(投掷)#
Fling 是 VEX IQ Hero Bot,用于 VIQRC 21-22 Pitching In Playground。
机器人概览#
Fling 支持标准的 VR 控制和传感器,例如 Brain Timer,其他 Fling 特有的功能在 机器人专用模块 和 机器人专用 Python 中进行了介绍。
电机#
配置和 |
描述 |
|---|---|
|
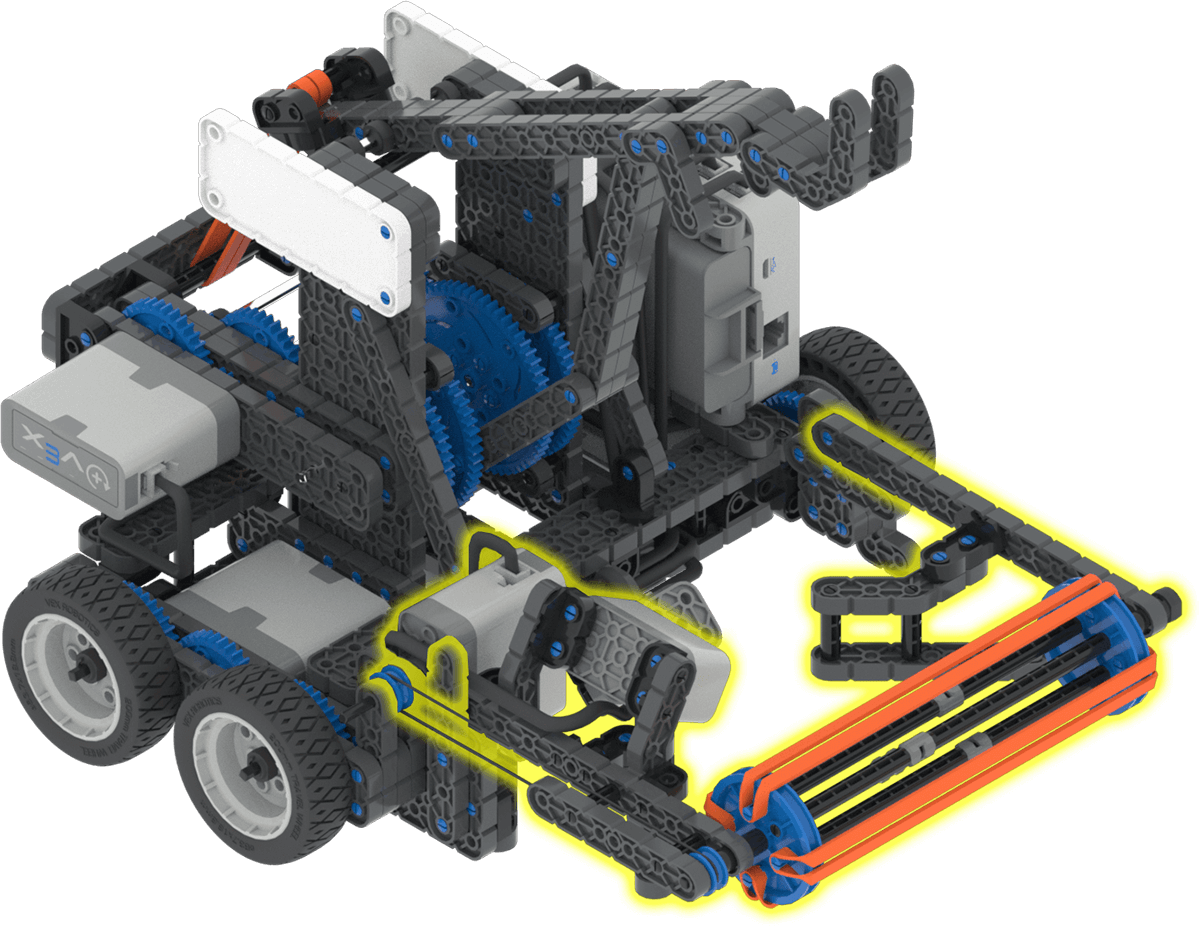
进料装置使机器人能够吸入球体,然后由弹射臂发射出去;或者反转进料装置,将球体旋转着抛出。进料电机从0度开始旋转,向前旋转180度即可吸入球体,向后旋转180度即可抛出球体。 |
|
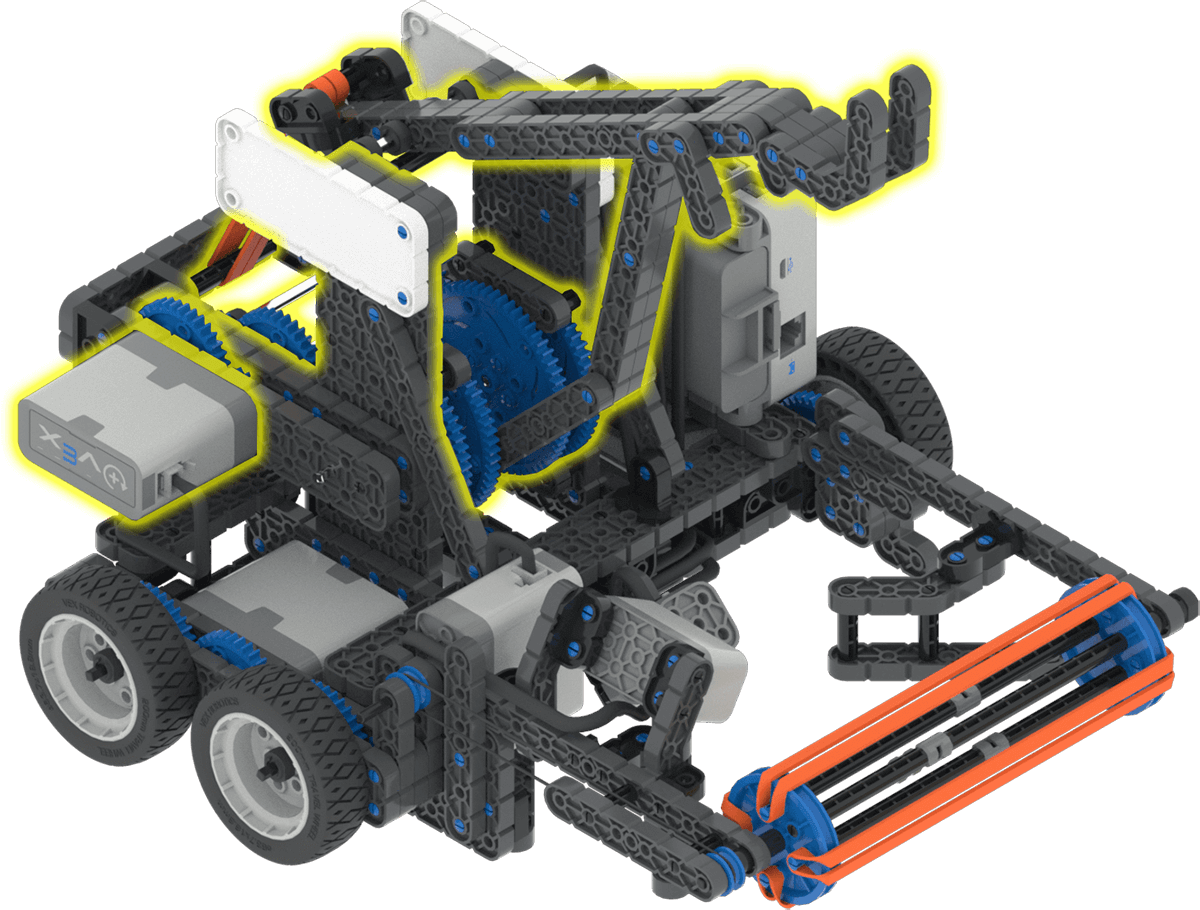
弹射电机使机器人能够将球发射到球门中,并从悬挂杆上完成低空投篮得分。弹射电机初始位置为0度(升起位置)。弹射臂在2600度时保持水平,在5000度时完全放下。 |
|
弹射臂张力电机使机器人能够将球发射到场地内不同距离的位置。默认张力设置为 90 度。 |
组件和功能#
组件或功能 |
使用 |
API 文档 |
|---|---|---|
传动系统 |
移动和转向机器人。 |
|
弹射进气马达 |
发射机器人拾取的球。 |
|
弹射马达 |
升降机械臂。这使得机器人能够从部分发球器中释放球,并越过障碍物触碰比赛结束时的接触区。 |
|
弹射臂张紧电机 |
使机器人能够将球发射到场地内不同距离的位置。 |
|
保险杠开关 |
检测进料口何时装入钢球。 |
|
颜色传感器 |
检测球的颜色。 |
|
距离传感器 |
检测球与机器人前端的距离。 |
|
脑力计时器 |
记录项目启动以来经过的时间。 |
游乐场#
操场 |
描述 |
|---|---|
在 VIQRC 21-22 虚拟技能赛场上收集并发射球。 |