IQ Rapid Relay (Swish)#
Swish is the VEX IQ Hero Bot used in the VIQRC 24-25 Rapid Relay Playground.
Robot Overview#
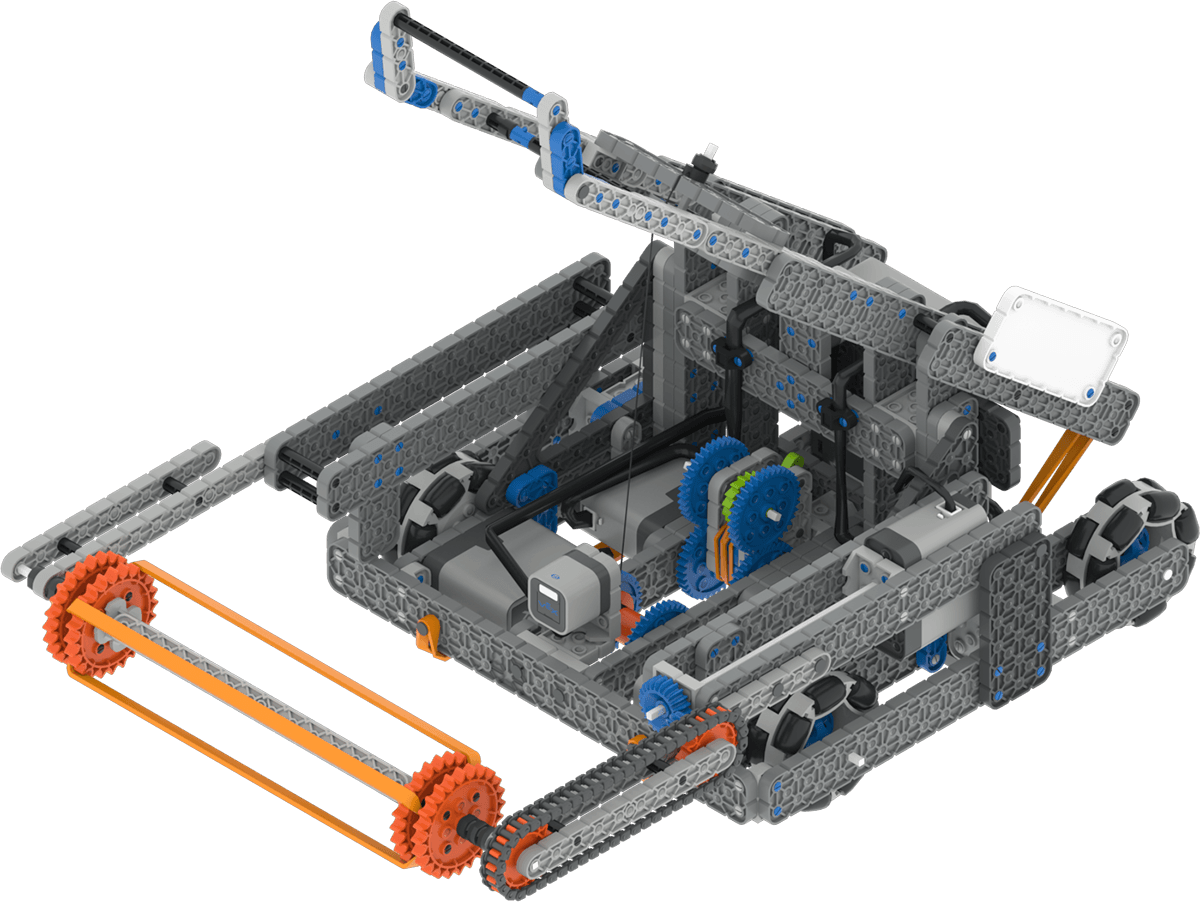
Swish supports standard VR controls and sensors such as the Inertial Sensor and Brain Timer, with additional Swish-specific features covered in Robot-Specific Blocks and Robot-Specific Python.
Motor Groups#
Configuration & |
Description |
|---|---|
|
The intake motor can be spun forward and in reverse to collect Balls and place them onto the catapult. The intake motor must be spinning before coming into contact with a Ball to pick it up. |
|
The catapult arm motor group is used to launch Balls that the robot has picked up. To pick up a Ball, the catapult arm must be lowered by at least 1350 degrees. When the catapult arm is raised or released by any distance, it automatically moves to its maximum height for launching Balls. |


Components and Features#
Component or Feature |
Use |
API Documentation |
|---|---|---|
Drivetrain |
Moves and turns the robot. |
|
Intake Motor |
Rotates the two wheels at the front of the robot. This allows Balls to be picked up off the ground. |
|
Catapult Motor Group |
Launches Balls that the robot has picked up. |
|
Rear Distance Sensor |
Detects how far the robot’s rear is from the Goal Wall. |
|
Intake Optical Sensor |
Detects whether a Ball is in the intake. |
|
Brain Timer |
Tracks elapsed time since the project started. |
Playgrounds#
Playground |
Description |
|---|---|
Collect and launch Balls in the VIQRC 24-25 Virtual Skills field. |