IQ aportando (Fling)#
Fling es el VEX IQ Hero Bot utilizado en el VIQRC 21-22 Pitching In Playground.
Descripción general del robot#
Fling admite controles y sensores de RV estándar como el Brain Timer, con características adicionales específicas de Fling que se tratan en Bloques específicos del robot y Python específico del robot.
Motores#
Configuración y nombre del comando Python |
Descripción |
|---|---|
|
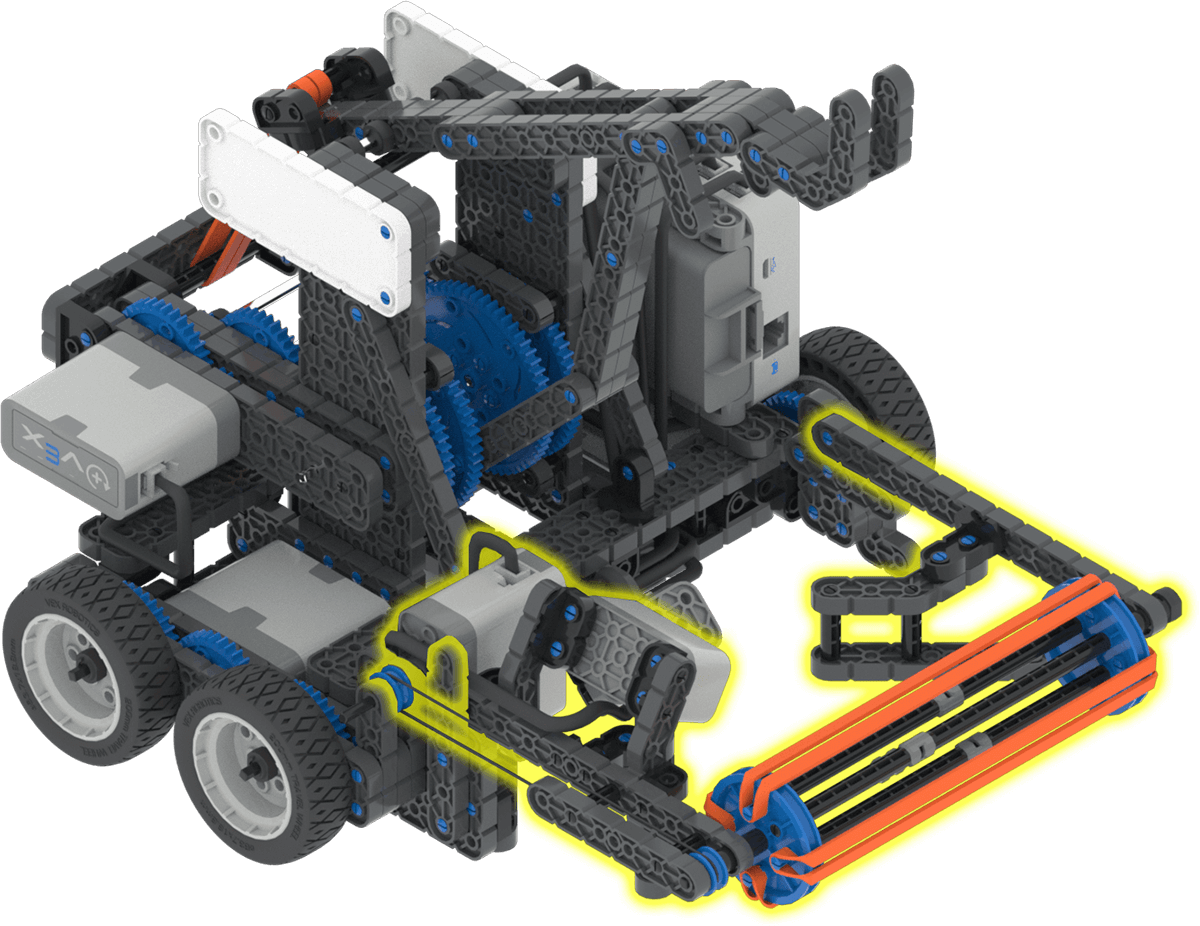
El sistema de entrada permite al robot recoger bolas para lanzarlas con el brazo de la catapulta, o bien invertir la entrada para expulsarlas. El motor de entrada arranca a 0 grados y recoge una bola al girar 180 grados hacia adelante, y la expulsa al girar 180 grados hacia atrás. |
|
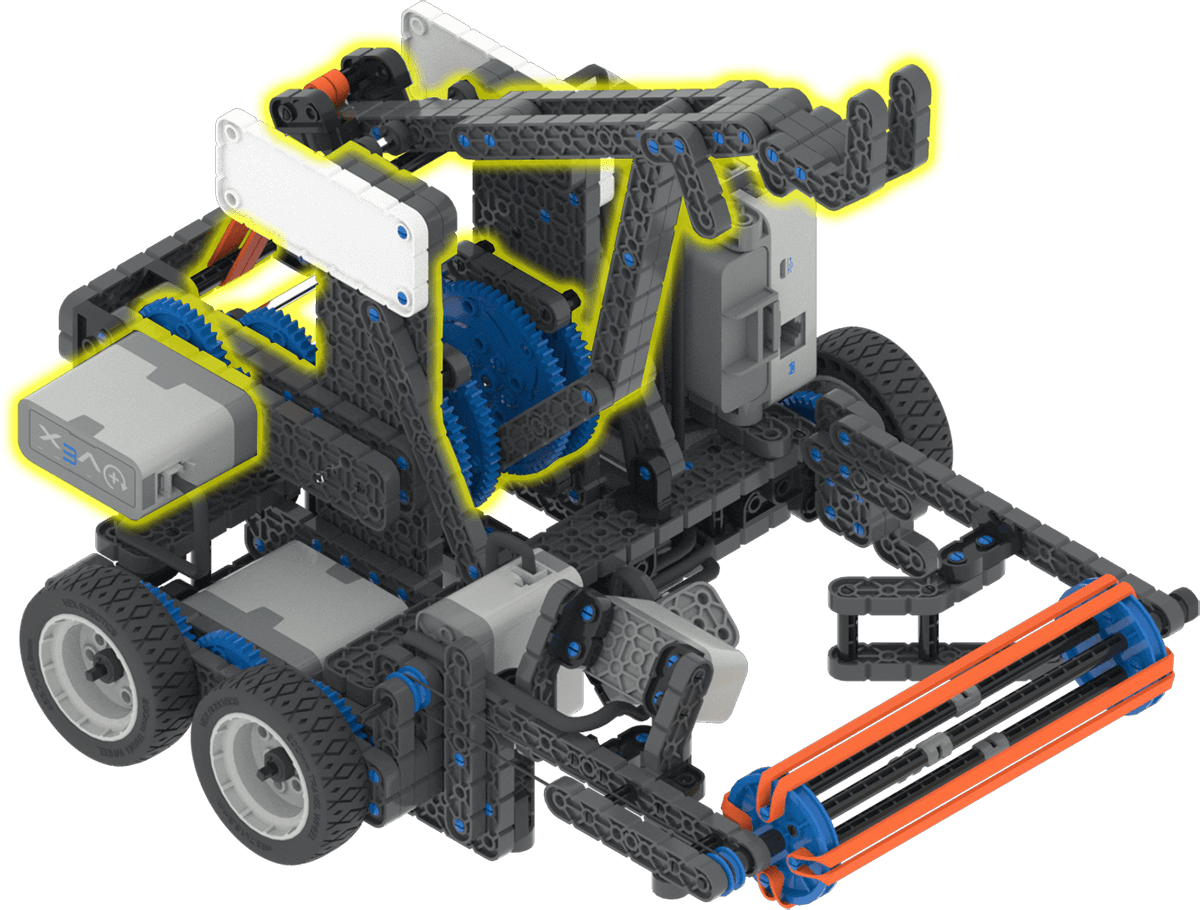
El motor de la catapulta permite al robot lanzar pelotas a las porterías y marcar puntos desde la barra de suspensión. El motor de la catapulta se activa a 0 grados en la posición elevada. El brazo de la catapulta se encuentra horizontal a 2600 grados y completamente extendido a 5000 grados. |
|
El motor de tensión del brazo de la catapulta permite que el robot lance pelotas a diferentes distancias por el campo. La tensión predeterminada está configurada a 90 grados. |
Componentes y características#
Componente o característica |
Usar |
Documentación de la API |
|---|---|---|
Tren de transmisión |
Mueve y gira el robot. |
|
Motor de admisión de catapulta |
Lanza las pelotas que el robot ha recogido. |
|
Motor de catapulta |
Eleva y baja el brazo. Esto permite al robot lanzar pelotas desde algunos de los dispensadores y alcanzar la zona de contacto al final de un partido, por encima de la barrera. |
|
Motor de tensión del brazo de la catapulta |
Permite que el robot lance pelotas a diferentes distancias a lo largo del campo. |
|
Interruptor de parachoques |
Detecta cuándo se carga una bola en la entrada. |
|
Sensor de color |
Detecta el color de las bolas. |
|
Sensor de distancia |
Detecta la distancia a la que se encuentra una pelota de la parte frontal del robot. |
|
Temporizador cerebral |
Registra el tiempo transcurrido desde que comenzó el proyecto. |
parques infantiles#
Patio de juegos |
Descripción |
|---|---|
Recoge y lanza pelotas en el campo de habilidades virtuales VIQRC 21-22. |