Movimiento#
Introducción#
El dron VEX AIR cuenta con cuatro hélices, lo que le permite moverse en cualquier dirección y girar de forma independiente. El sistema Motion ofrece funciones para el movimiento, los giros, los ajustes de velocidad y el seguimiento de la posición.
A continuación se muestra una lista de bloques disponibles:
Acciones: Mover y girar el dron.
despegue — Eleva el dron a una altura especificada.
land — Aterriza el dron.
hover — Mantiene el dron en su posición.
climb — Mueve el dron en una dirección vertical especificada.
subir para — Mueve el dron en una dirección vertical especificada durante una distancia específica.
subir a la posición z — Mueve el dron a una posición específica en el eje z.
mover — Mueve el dron hacia adelante, hacia atrás, hacia la izquierda o hacia la derecha.
mover en ángulo — Mueve el dron en una dirección específica usando un ángulo.
mover por — Mueve el dron en una dirección específica durante una distancia establecida.
mover en ángulo durante — Mueve el dron en un ángulo específico durante una distancia establecida.
mover a — Mueve el dron a una posición específica.
turn — Gira el dron hacia la izquierda o hacia la derecha.
girar para — Gira el dron una cantidad específica de grados.
girar hacia el rumbo — Gira el dron para orientarlo hacia un rumbo específico.
Mover con el controlador — Permite conducir el dron usando el controlador.
Control de vuelo: ajusta la configuración del vuelo.
establecer punto de vista de dirección — Establece el punto de vista para dirigir el dron.
establecer movimiento — Establece el estilo de movimiento del dron.
Ajustes: Ajusta las velocidades de movimiento y giro.
establecer velocidad de ascenso — Establece la velocidad de ascenso predeterminada.
establecer velocidad de movimiento — Establece la velocidad de movimiento predeterminada.
establecer velocidad de giro — Establece la velocidad de giro predeterminada.
Posición: rastrea y modifica la posición del dron.
position — Devuelve la coordenada x, y o z actual del dron.
obtener altura z máxima — Devuelve la altura máxima que puede alcanzar el dron.
establecer altura z máxima - Establece un límite a qué tan alto volará el dron.
establecer posición — Establece manualmente la posición x, y o z del dron.
Valores — Verificar estado de movimiento.
estado de vuelo — Devuelve el estado actual del dron.
modo seguro — Devuelve el estado de bloqueo de la hélice del dron.
escalada activa — Devuelve si el dron está escalando actualmente.
move active — Devuelve si el dron se está moviendo actualmente.
girar activo — Devuelve si el dron está girando actualmente.
flotando — Devuelve si el dron está actualmente flotando.
despegando — Devuelve si el dron está despegando en ese momento.
aterrizaje — Devuelve si el dron está aterrizando en ese momento.
aterrizado — Devuelve si el dron ha aterrizado.
Comportamiento#
despegar#
El bloque de despegue activa las hélices y eleva el dron. Este bloque debe utilizarse antes de poder realizar cualquier otro movimiento.
despegar a [500] [mm v] ▶
Parámetros |
Descripción |
|---|---|
subir a |
La posición z (altura) a la que ascenderá el dron. |
unidades |
La unidad de medida: mm (milímetros) o pulgadas. |
y no esperes |
Seleccione la flecha ( ▶ ) para expandir el bloque y decir y no espere, de modo que el siguiente bloque en la pila se ejecutará inmediatamente. |
Ejemplo
cuando empezó
[Fly for 1 second.]
despegar a [500] [mm v] ▶
esperar [1] segundos
tierra ▶
tierra#
El bloque de aterrizaje terrestre baja el dron al suelo. Las hélices seguirán funcionando hasta que se detenga el proyecto.
tierra ▶
Parámetros |
Descripción |
|---|---|
y no esperes |
Seleccione la flecha ( ▶ ) para expandir el bloque y decir y no espere, de modo que el siguiente bloque en la pila se ejecutará inmediatamente. |
Ejemplo
cuando empezó
[Land after 1 second.]
despegar a (500) [mm v] ▶
esperar [1] segundos
tierra ▶
flotar#
El bloque de pila hover impide que el dron se mueva en cualquier dirección y mantiene su posición actual en el aire.
flotar
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Hold current position for 3 seconds after moving forward.]
despegar a (500) [mm v] ▶
movimiento [adelante v]
esperar [1] segundos
flotar
esperar [3] segundos
tierra ▶
trepar#
El bloque de apilamiento escalada mueve el dron en una dirección vertical específica.
subir [arriba v]
Parámetros |
Descripción |
|---|---|
dirección |
La dirección en la que volará el dron: hacia arriba o hacia abajo. |
Ejemplo
cuando empezó
[Climb upwards for 2 seconds.]
despegar a (500) [mm v] ▶
esperar [2] segundos
subir [arriba v]
esperar [2] segundos
tierra ▶
escalar para#
El bloque de apilamiento escalar para mueve el dron en una dirección vertical específica durante una distancia específica.
subir [arriba v] por (500) [mm v] ▶
Parámetros |
Descripción |
|---|---|
dirección |
La dirección en la que volará el dron: hacia arriba o hacia abajo. |
distancia |
La distancia que volará el dron. |
unidades |
La unidad de medida: mm (milímetros) o pulgadas. |
y no esperes |
Seleccione la flecha ( ▶ ) para expandir el bloque y decir y no espere, de modo que el siguiente bloque en la pila se ejecutará inmediatamente. |
Ejemplo
cuando empezó
[Lower drone before landing.]
despegar a [700] [mm v] ▶
esperar [1] segundos
subir [abajo v] por [300] [mm v] ▶
esperar [1] segundos
tierra ▶
subir a la posición z#
El bloque de pila ascender a la posición z mueve el dron a una posición específica en el eje z.
subir a la posición z [500] [mm v] ▶
Parámetros |
Descripción |
|---|---|
posición z |
La posición z, como número entero o decimal, a la que ascenderá el dron. |
unidades |
La unidad de medida: mm (milímetros) o pulgadas. |
y no esperes |
Seleccione la flecha ( ▶ ) para expandir el bloque y decir y no espere, de modo que el siguiente bloque en la pila se ejecutará inmediatamente. |
Ejemplo
cuando empezó
[Reach 500 mm after takeoff.]
despegar a [300] [mm v] ▶
esperar [1] segundos
subir a la posición z [500] [mm v] ▶
esperar [1] segundos
tierra ▶
mover#
El bloque de pila move mueve el dron en cuatro direcciones específicas utilizando la [velocidad de movimiento] actual (#set-move-velocity).
movimiento [adelante v]
Parámetros |
Descripción |
|---|---|
dirección |
Mueva el dron en una de las siguientes direcciones:
|
Ejemplo
cuando empezó
[Move forward for 2 seconds.]
despegar a [500] [mm v] ▶
movimiento [adelante v]
esperar [2] segundos
tierra ▶
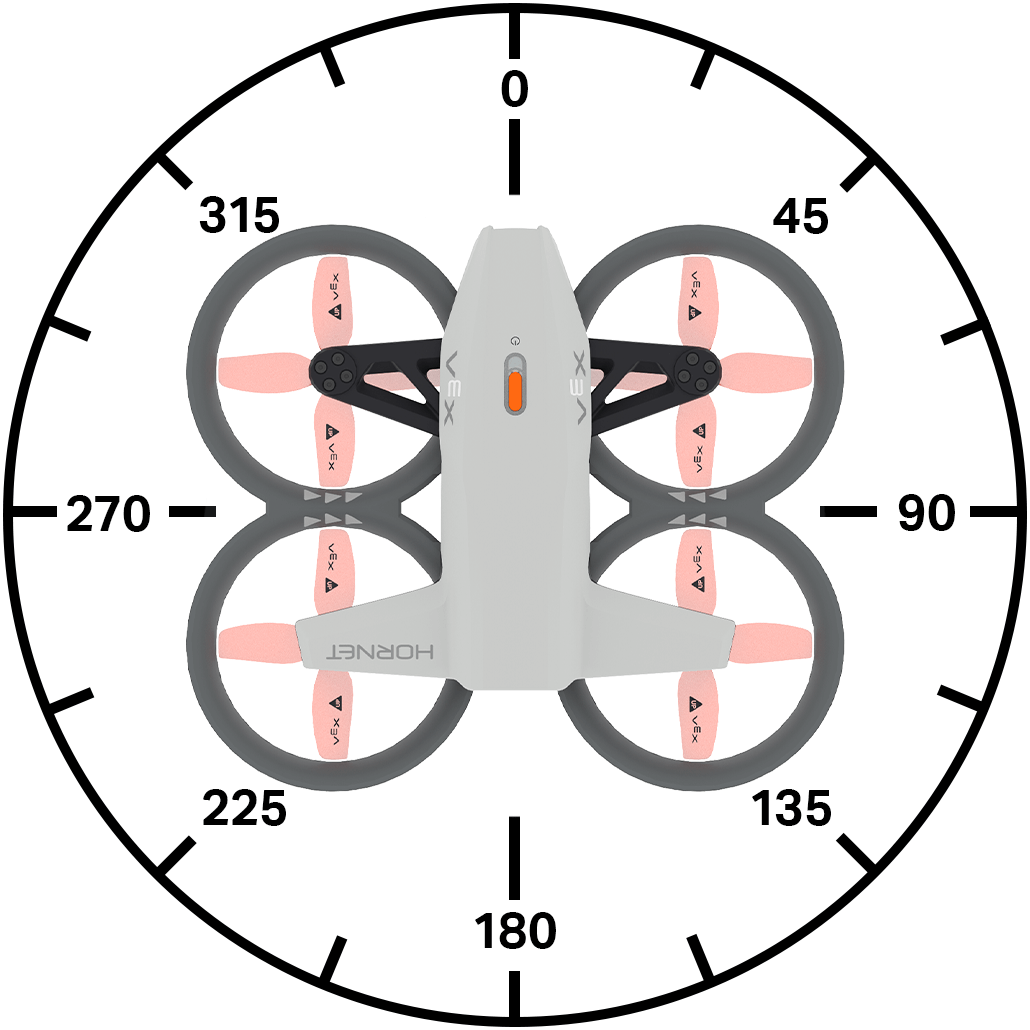
moverse en ángulo#
El bloque de pila mover en ángulo mueve el dron en un ángulo especificado utilizando la [velocidad de movimiento] actual (https://api.vex.com/air/home/blocks/Motion.html#set-move-velocity).
moverse a (90) grados
Parámetros |
Descripción |
|---|---|
ángulo |
El ángulo, en número entero o decimal, en el que se mueve el dron, que varía entre 0 y 359 grados. |
Ejemplos
cuando empezó
[Move left for 2 seconds.]
despegar a [500] [mm v] ▶
moverse a [270] grados
esperar [2] segundos
tierra ▶
moverse para#
El bloque de pila move for mueve el dron en cuatro direcciones específicas durante una distancia específica utilizando la [velocidad de movimiento] actual (#set-move-velocity).
mover [adelante v] por (200) [mm v] ▶
Parámetros |
Descripción |
|---|---|
dirección |
Mueva el dron en una de las siguientes direcciones:
|
distancia |
La distancia, en número entero o decimal, que se moverá el dron. |
unidades |
La unidad de medida: mm (milímetros) o pulgadas. |
y no esperes |
Seleccione la flecha ( ▶ ) para expandir el bloque y decir y no espere, de modo que el siguiente bloque en la pila se ejecutará inmediatamente. |
Ejemplo
cuando empezó
[Move forward for 200 mm.]
despegar a [500] [mm v] ▶
mover [adelante v] por [200] [mm v] ▶
tierra ▶
moverse en ángulo para#
El bloque de pila mover en ángulo para mueve el dron en un ángulo específico durante una distancia determinada utilizando la [velocidad de movimiento] actual (#set-move-velocity).
moverse a (45) grados durante (200) [mm v] ▶
Parámetros |
Descripción |
|---|---|
ángulo |
El ángulo, en número entero o decimal, en el que se mueve el dron, que varía entre 0 y 359 grados. |
distancia |
La distancia, en número entero o decimal, que se moverá el dron. |
unidades |
La unidad de medida: mm (milímetros) o pulgadas. |
y no esperes |
Seleccione la flecha ( ▶ ) para expandir el bloque y decir y no espere, de modo que el siguiente bloque en la pila se ejecutará inmediatamente. |
Ejemplos
cuando empezó
[Move diagonally for 500 mm.]
despegar a [300] [mm v] ▶
moverse a [45] grados durante [500] [mm v] ▶
tierra ▶
convidar a#
El bloque mover a mueve el dron a una posición específica en el aire manteniendo la misma dirección.
mover a x: [1000] y: [1000] z: [1000] [mm v] ▶
Parámetros |
Descripción |
|---|---|
incógnita |
La coordenada x a la que se moverá el dron. |
y |
La coordenada y a la que se moverá el dron. |
z |
La coordenada z a la que ascenderá el dron. |
unidades |
La unidad de medida: mm (milímetros) o pulgadas. |
Ejemplos
cuando empezó
[Move diagonally to (300, 300, 500).]
despegar a [300] [mm v] ▶
esperar [2] segundos
mover a x: [300] y: [300] z: [500] [mm v] ▶
esperar [2] segundos
tierra ▶
doblar#
El bloque de pila turn hace girar el dron en una dirección específica utilizando la [velocidad de giro] actual (#set-turn-velocity).
turno [derecha v]
Parámetros |
Descripción |
|---|---|
dirección |
La dirección en la que gira el dron: derecha o izquierda. |
Ejemplo
cuando empezó
[Turn to the right for 2 seconds.]
despegar a [500] [mm v] ▶
turno [derecha v]
esperar [2] segundos
tierra ▶
girar para#
El bloque de pila turn for gira el dron en una dirección específica durante una distancia determinada con respecto a su dirección actual de orientación utilizando la [velocidad de giro] (#set-turn-velocity).
girar [derecha v] por (90) grado ▶
Parámetros |
Descripción |
|---|---|
dirección |
La dirección en la que gira el dron: derecha o izquierda. |
ángulo |
El ángulo, en número entero o decimal, en el que se mueve el dron, que varía entre 0 y 359 grados. |
y no esperes |
Seleccione la flecha ( ▶ ) para expandir el bloque y decir y no espere, de modo que el siguiente bloque en la pila se ejecutará inmediatamente. |
Ejemplos
cuando empezó
[Turn around, then land.]
despegar a [500] [mm v] ▶
girar [derecha v] por [180] grado ▶
tierra ▶
girar al rumbo#
El bloque de pila girar hacia un rumbo hace girar el dron para que mire hacia un rumbo específico utilizando la [velocidad de giro] actual (#set-turn-velocity).
girar hacia el rumbo (270) grados ▶
Parámetros |
Descripción |
|---|---|
título |
La dirección hacia la que girará el dron oscilará entre 0 y 359 grados. |
y no esperes |
Seleccione la flecha ( ▶ ) para expandir el bloque y decir y no espere, de modo que el siguiente bloque en la pila se ejecutará inmediatamente. |
Ejemplos
cuando empezó
[Turn to face each of the cardinal headings.]
despegar a [500] [mm v] ▶
girar hacia el rumbo (90) grados ▶
esperar [1] segundos
girar hacia el rumbo (180) grados ▶
esperar [1] segundos
girar hacia el rumbo (270) grados ▶
esperar [1] segundos
girar hacia el rumbo (0) grados ▶
esperar [1] segundos
tierra ▶
moverse con el controlador#
El bloque Mover con controlador permite controlar el dron mediante el controlador VEX AIR. Este bloque debe usarse dentro de un bucle para controlar el dron de forma continua. Si el bucle se detiene y no hay otros bloques que le indiquen al dron que se mueva, este seguirá moviéndose en la última dirección en la que se encontraba.
moverse con el controlador
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Move with controller until button 7 is pressed.]
despegar a [500] [mm v] ▶
repetir hasta <¿Botón del controlador [7 v] presionado?>
moverse con el controlador
fin
tierra ▶
Control de vuelo#
establecer el punto de vista de la dirección#
El bloque de pila establecer punto de vista de dirección establece el punto de vista que se utiliza al dirigir el dron.
establecer el punto de vista de dirección a [estándar v]
Parámetros |
Descripción |
|---|---|
estilo |
Establece el punto de vista que se utiliza para dirigir el dron. Estándar significa que los movimientos se basan en la dirección en la que apunta el dron. Sin cabeza significa que los movimientos se basan en la orientación del dron al inicio del proyecto. |
Ejemplo
cuando empezó
[Steer based on the drone's starting orienation until button 7 is pressed.]
despegar a [500] [mm v] ▶
establecer el punto de vista de dirección a [sin cabeza v]
repetir hasta <¿Botón del controlador [7 v] presionado?>
moverse con el controlador
fin
tierra ▶
movimiento establecido#
El bloque de pila establecer movimiento establece el estilo de movimiento del dron.
Este estilo de movimiento se utiliza cuando se vuela el dron con un controlador.
establecer el movimiento a [precisión v]
Parámetros |
Descripción |
|---|---|
estilo |
Establece el estilo que se utiliza para dirigir el dron:
|
Ejemplo
cuando empezó
[Control the drone with the balanced movement style.]
despegar a [500] [mm v] ▶
establecer el movimiento a [equilibrado v]
repetir hasta <¿Botón del controlador [7 v] presionado?>
moverse con el controlador
fin
tierra ▶
Ajustes#
establecer velocidad de ascenso#
El bloque establecer velocidad de ascenso establece la velocidad de ascenso predeterminada como un porcentaje. Esto afectará a cualquier bloque posterior relacionado con el ascenso. La velocidad de ascenso predeterminada es del 50 %.
set climb velocity to [100] %
Parámetros |
Descripción |
|---|---|
velocidad |
La velocidad a la que ascenderá el dron, expresada como porcentaje. |
Ejemplo
cuando empezó
[Raise the drone quickly before landing.]
despegar a [300] [mm v] ▶
esperar [1] segundos
set climb velocity to [100] %
subir [arriba v] por (500) [mm v] ▶
tierra ▶
establecer velocidad de movimiento#
El bloque establecer velocidad de movimiento establece la velocidad de movimiento predeterminada como un porcentaje. Esto afectará a cualquier bloque posterior relacionado con el movimiento. La velocidad de movimiento predeterminada es del 50 %.
set move velocity to [100] %
Parámetros |
Descripción |
|---|---|
velocidad |
La velocidad a la que se moverá el dron como porcentaje. |
Ejemplo
cuando empezó
[Move forward quickly, then reverse slowly.]
despegar a [500] [mm v] ▶
set move velocity to [100] %
mover [adelante v] por [500] [mm v] ▶
esperar (1) segundos
set move velocity to [20] %
mover [atrás v] por [500] [mm v] ▶
tierra ▶
establecer la velocidad de giro#
El bloque establecer velocidad de giro establece la velocidad de giro predeterminada como un porcentaje. Esto afectará a cualquier bloque posterior relacionado con el giro. La velocidad de giro predeterminada es del 50 %.
set turn velocity to [100] %
Parámetros |
Descripción |
|---|---|
velocidad |
La velocidad a la que girará el dron expresada en porcentaje. |
Ejemplo
cuando empezó
[Turn clockwise quickly, then counterclockwise slowly.]
despegar a [500] [mm v] ▶
set turn velocity to [100] %
girar [derecha v] por [360] grado ▶
esperar (1) segundos
set turn velocity to [20] %
girar [izquierda v] por [360] grado ▶
tierra ▶
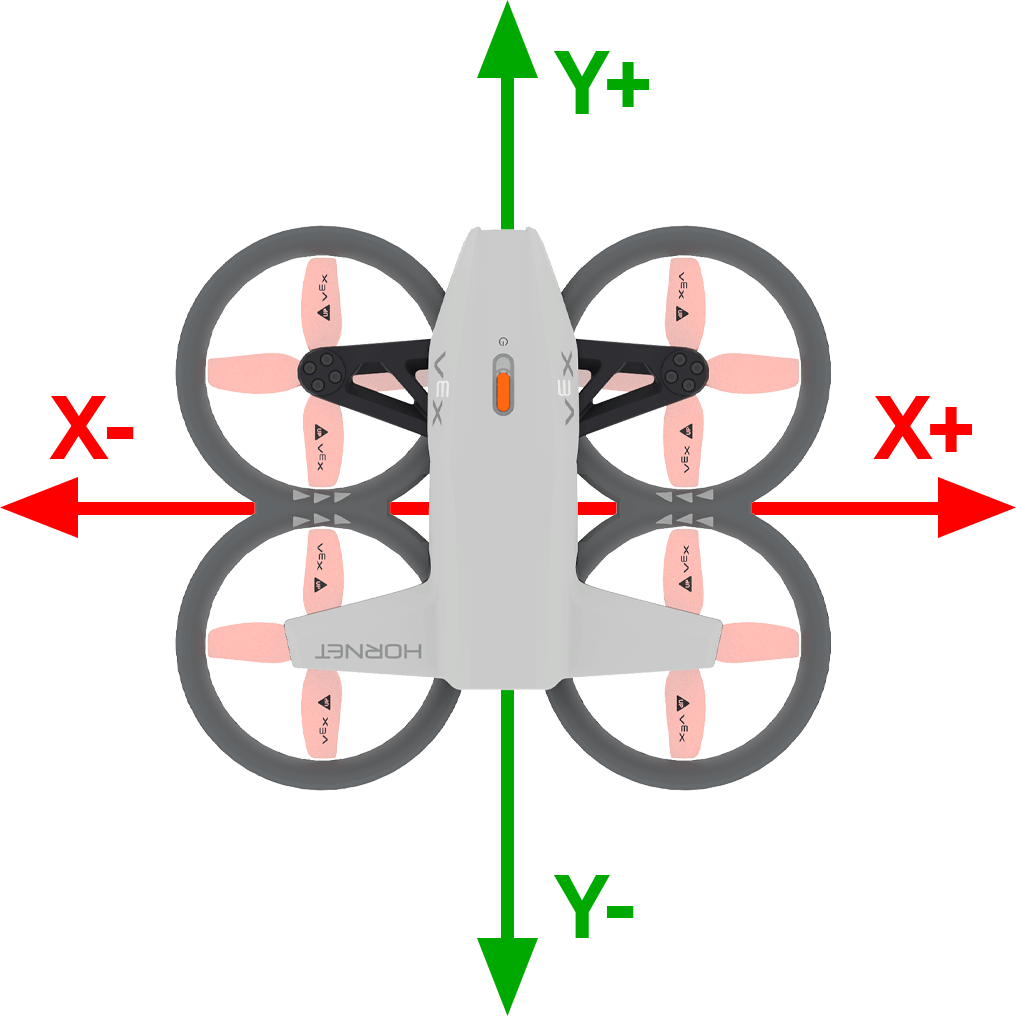
Posición#
posición#
El bloque de informe de posición informa la coordenada x, y o z actual del dron como un número entero. Al inicio de un proyecto, la posición actual del dron se establece automáticamente en (0, 0, 0).
[incógnita v] posición en [mm v]
Parámetros |
Descripción |
|---|---|
eje |
¿De qué eje se deben reportar las coordenadas?:
|
unidades |
La unidad de medida: mm (milímetros) o pulgadas. |
Ejemplo
cuando empezó
[Fly to position (0, 300, 500).]
despegar a [500] [mm v] ▶
esperar [1] segundos
movimiento [adelante v]
esperar hasta <([y v] posición en [mm v]) [math_greater_than v] [300]>
flotar
esperar [1] segundos
tierra ▶
obtener la altura z máxima#
El bloque de informe obtener altura Z máxima informa la altura máxima que puede alcanzar el dron.
(get max z height in [mm v])
Parámetros |
Descripción |
|---|---|
unidades |
La unidad de medida: mm (milímetros) o pulgadas. |
Ejemplo
cuando empezó :: hat events
[Display the new z height limit.]
imprimir (get max z height in [mm v]) en la pantalla ▶
Colocar el cursor en la siguiente fila de la pantalla
despegar a [500] [mm v] ▶
Establezca la altura z máxima en [1000] en [mm v]
imprimir (get max z height in [mm v]) en la pantalla ▶
esperar [1] segundos
tierra ▶
establecer la altura z máxima#
El bloque de pila establecer altura Z máxima establece un límite a la altura máxima que volará el dron.
Establezca la altura z máxima en [2500] en [mm v]
Parámetros |
Descripción |
|---|---|
altura z máxima |
El valor máximo del eje z, expresado como un número entero o decimal, por encima del cual el dron no volará, en un rango de 1000 a 5000 mm o de 40 a 196 pulgadas. |
unidades |
La unidad de medida: mm (milímetros) o pulgadas. |
Ejemplo
cuando empezó
[Fly with controller under 1000 mm.]
Establezca la altura z máxima en [1000] en [mm v]
despegar a (500) [mm v] ▶
repetir hasta <¿Botón del controlador [7 v] presionado?>
moverse con el controlador
fin
tierra ▶
posición establecida#
El bloque de pila establecer posición establece la coordenada x, y o z actual del dron a un valor específico.
Establezca la posición [incógnita v] en [0] [mm v]
Parámetros |
Descripción |
|---|---|
eje |
Eje de coordenadas para establecer la posición:
|
coordinar |
El nuevo valor de posición a establecer. |
unidades |
La unidad de medida: mm (milímetros) o pulgadas. |
Ejemplo
cuando empezó
[Set a new z position, then fly to z position -300.]
despegar a [800] [mm v] ▶
Establezca la posición [z v] en [0] [mm v]
esperar [1] segundos
subir [abajo v]
esperar hasta <([z v] posición en [mm v]) [math_less_than v] [-300]>
flotar
esperar [1] segundos
tierra ▶
Valores#
estado de vuelo#
El bloque booleano estado de vuelo indica si el dron se encuentra o no en el estado de vuelo especificado.
Verdadero — El dron se encuentra en el estado especificado.
Falso — El dron no se encuentra en el estado especificado.
<¿El estado del vuelo es [motors off v]?>
Parámetros |
Descripción |
|---|---|
estado |
Estado de vuelo a comprobar:
|
Ejemplo
cuando empezó
[Report the flight status as the drone takes off.]
imprimir [Preparing for flight!] en la pantalla ◀ y coloque el cursor en la siguiente fila
despegar a [800] %2 ◀ y no esperes
esperar hasta <flight state is [motor start v]>
imprimir [Motors starting...] en la pantalla ◀ y coloque el cursor en la siguiente fila
esperar hasta <flight state is [flight v]>
imprimir [Take off!] en la pantalla ▶
modo seguro#
El bloque booleano modo seguro indica si el bloqueo de hélices está activado en el dron.
Verdadero — El bloqueo de hélice está activado.
Falso — El bloqueo de hélice no está activado.
<¿Modo seguro?>
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Change the sound by enabling the Propeller Lock.]
para siempre
si <¿Modo seguro?> entonces
reproducir sonido [falla v]
demás
reproducir sonido [éxito v]
escalar activo#
El bloque booleano climb active indica si el dron está ascendiendo.
Verdadero — El dron está ascendiendo actualmente.
Falso — El dron no está ascendiendo.
<¿escalada activa?>
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[After the drone starts to climb, play a sound and land.]
despegar a [500] [mm v] ▶
subir [arriba v]
esperar [1] segundos
si <¿escalada activa?> entonces
reproducir sonido [bucle v] ▶
tierra ▶
moverse activo#
El bloque booleano move active indica si el dron está utilizando actualmente un bloque de movimiento.
Verdadero — El dron está usando actualmente un bloque de movimiento.
Falso — El dron no está utilizando actualmente un bloque de movimiento.
<¿mover activamente?>
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[After the drone starts to move, play a sound and land.]
despegar a [500] [mm v] ▶
movimiento [adelante v]
esperar [1] segundos
si <¿mover activamente?> entonces
reproducir sonido [bucle v] ▶
tierra ▶
activarse#
El bloque booleano turn active indica si el dron está girando.
Verdadero — El dron está girando en este momento.
Falso — El dron no está girando.
<¿activarse?>
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[After the drone starts to turn, play a sound and land.]
despegar a (500) [mm v] ▶
turno [derecha v]
esperar [1] segundos
si <¿activarse?> entonces
reproducir sonido [detectado v] ▶
tierra ▶
flotando#
El bloque booleano hovering indica si el dron mantiene su posición (flotando).
Verdadero — El dron está manteniendo su posición (flotando).
Falso — El dron está cambiando de posición en este momento.
<¿flotando?>
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Play a sound after the drone has finished taking off.]
despegar a [700] [mm v] ▶
esperar hasta <¿flotando?>
esperar [2] segundos
reproducir sonido [pausa v] ▶
tierra ▶
despegando#
El bloque booleano despegue indica si el dron está en proceso de despegar.
Verdadero — El dron se encuentra actualmente en proceso de despegue.
Falso — El dron no está en proceso de despegar.
<¿despegando?>
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Play sounds while the drone is taking off.]
despegar a [700] %2 ◀ y no esperes
esperar [1] segundos
mientras <¿despegando?>
reproducir sonido [detección v] ▶
aterrizaje#
El bloque booleano landing indica si el dron está en proceso de aterrizaje.
Verdadero — El dron se encuentra actualmente en proceso de aterrizaje.
Falso — El dron no está en proceso de aterrizaje.
<¿aterrizaje?>
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Play sounds while the drone is landing.]
despegar a (500) [mm v] ▶
esperar [1] segundos
tierra ◀ y no esperes
esperar [1] segundos
mientras <¿aterrizaje?>
reproducir sonido [bucle v] ▶
aterrizado#
El bloque booleano landed indica si el dron ha aterrizado.
Verdadero — El dron ha aterrizado.
Falso — El dron no ha aterrizado.
<¿aterrizado?>
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Celebrate a successful landing.]
despegar a (500) [mm v] ▶
esperar (1) segundos
tierra ▶
si <landed> entonces
reproducir sonido [éxito v] ▶