运动#
旋转#
旋转块用于无限旋转电机或电机组。
这是一个非等待块,允许任何后续块无延迟地执行。
[Motor 1 v] [向前 v] 转
选择要使用的电机或电机组。
选择电机或电机组的移动方向。
在此示例中,电机将正向旋转 1 秒然后停止。
当开始
[Motor 1 v] [向前 v] 转
等待 (1) 秒
[Motor 1 v] 停止
旋转#
Spin for 块用于使电机或电机组旋转给定的距离。
这可以是非等待或等待块,取决于是否使用并且不等待选项。
[Motor 1 v] [向前 v] 转 (90) [度 v] ▶
选择要使用的电机或电机组。
选择电机或电机组的移动方向。

通过输入一个值并选择测量单位(度或圈)来设置电机或电机组的旋转距离。
默认情况下,旋转块会阻止任何后续块的执行,直到其完成为止。通过展开旋转块以显示不等待,块将在电机或电机组移动时继续执行。
[Motor 1 v] [向前 v] 转 (1) [转 v] ◀ 并且不等待
在这个例子中,电机将正向旋转 1 圈。
当开始
[Motor 1 v] [向前 v] 转 (1) [转 v] ▶
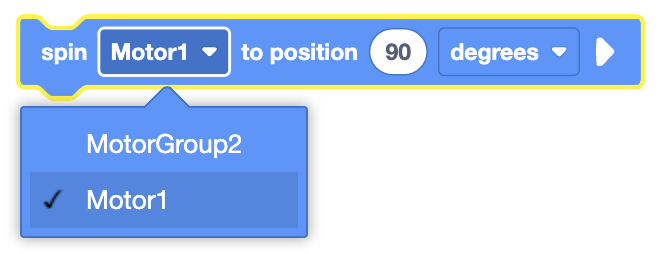
旋转至指定位置#
旋转到位置块用于将电机或电机组旋转到设定位置。
这可以是非等待或等待块,取决于是否使用并且不等待选项。
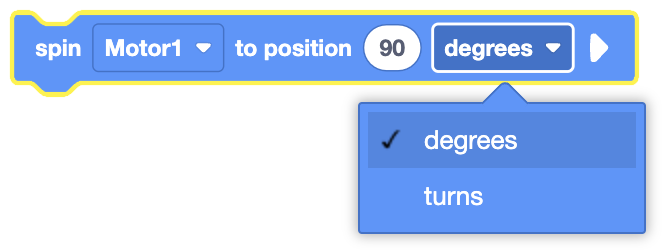
[Motor 1 v] 转至 (90) [度 v] ▶
选择要使用的电机或电机组。
通过输入一个值并选择测量单位(度或圈)来设置电机或电机组的旋转距离。
默认情况下,旋转到指定位置积木会阻止所有后续积木的执行,直到其完成。通过展开旋转到指定位置积木以显示不等待,积木将在电机移动时继续执行。
[Motor 1 v] 转至 (90) [度 v] ◀ 并且不等待
在这个例子中,电机将旋转到 270 度的位置。
当开始
[Motor 1 v] 转至 (270) [度 v] ▶
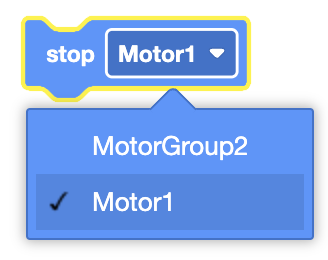
停止电机#
停止电机块用于停止电机或电机组移动。
这是一个非等待块,允许任何后续块无延迟地执行。
[Motor 1 v] 停止
选择要使用的电机或电机组。
在此示例中,进气电机将沿进气方向旋转 1 秒钟,然后停止。
当开始
[Motor 1 v] [向前 v] 转
等待 (1) 秒
[Motor 1 v] 停止
设置电机位置#
设置电机位置块用于将电机或电机组的编码器位置设置为输入的值。
这是一个非等待块,允许任何后续块无延迟地执行。
设定 [Motor 1 v] 转位至 (0) [度 v]
选择要使用的电机或电机组。
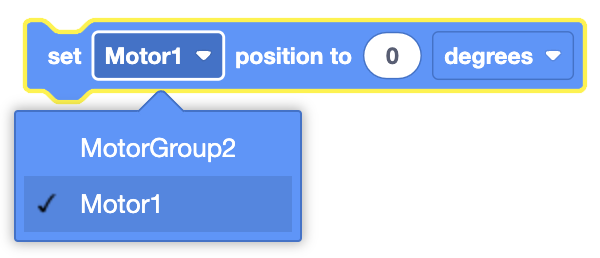
设置要使用的测量单位,度或圈。
在此示例中,电机的编码器位置在电机旋转到 0 度位置之前设置为 90 度。
当开始
设定 [Motor 1 v] 转位至 (90) [度 v]
[MotorGroup2 v] 转至 (0) [度 v] ▶
设置电机速度#
设置电机速度块用于设置电机或电机组的速度。
这是一个非等待块,允许任何后续块无延迟地执行。
设定 [Motor 1 v] 转速为 (50) [% v]
选择要使用的电机或电机组。
设置电机速度块将接受-100%到100%的范围。
在此示例中,电机将正向旋转 1 圈,然后将电机的速度设置为 75%,然后反向旋转 1 圈。
当开始
[Motor 1 v] [向前 v] 转 (1) [转 v] ▶
设定 [Motor 1 v] 转速为 (75) [% v]
[Motor 1 v] [反 v] 转 (1) [转 v] ▶
设置电机停止#
设置电机停止块用于设置电机或电机组停止运动时的行为。
设定 [Motor 1 v] 停止模式为 [刹车 v]
选择要使用的电机或电机组。
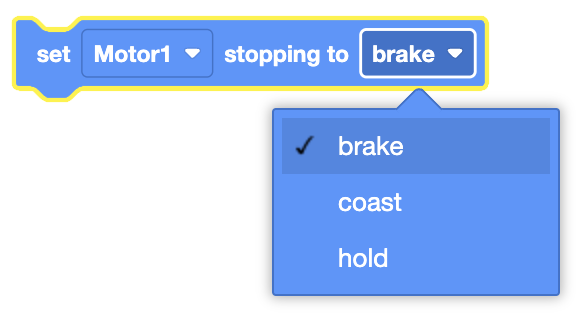
选择要使用的停止行为。
三种驱动器停止行为如下:
制动 - 电机或电机组将立即停止。
滑行——电机或电机组将逐渐旋转直至停止。
保持 - 电机或电机组将立即停止。如果电机或电机组受到外力旋转,内置编码器会将电机或电机组移回其初始停止位置。
在此示例中,电机运转 2 秒后才滑行停止。
当开始
[Set the motor's stopping mode to coast.]
设定 [Motor 1 v] 停止模式为 [滑行 v]
[Spin the motor forward for 2 seconds before stopping.]
[Motor 1 v] [向前 v] 转
等待 (2) 秒
[Motor 1 v] 停止
设置电机最大扭矩#
设置电机最大扭矩 模块用于设置智能电机或电机组的扭矩强度。该模块的设置范围为 0% 到 100%。
set [Motor1 v] max torque to (50)%
选择要使用的电机或电机组。
在此示例中,电机的扭矩在旋转到 350 度位置之前设置为 80%。
当开始
set [Motor1 v] max torque to (80)%
[Motor 1 v] 转至 (350) [度 v] ▶
设置电机超时#
设置电机超时块用于设置智能电机或电机组运动块的时间限制。
电机或电机组的时间限制用于防止未到达其位置的运动块阻止堆栈中的其他块运行。电机或电机组未到达其位置的一个例子是,手臂或爪子达到其机械极限而无法完成其运动。
设定 [Motor 1 v] 超时为 (1) 秒
选择要使用的电机或电机组。
在此示例中,电机设置为正转 5 圈,超时时间为 1 秒。由于电机无法在 1 秒内到达目标位置,因此 旋转 模块将自动停止,电机将返回 0 度位置。
当开始
[Set the motor's timeout to 1 second.]
设定 [Motor 1 v] 超时为 (1) 秒
[Motor 1 v] [向前 v] 转 (5) [转 v] ▶
[Motor 1 v] 转至 (0) [度 v] ▶