传感#
大脑感知#
重置计时器#
重置计时器块用于重置 IQ Brain 的计时器。
重置计时器
Brain 的计时器在每个项目开始时启动。重置计时器积木用于将计时器重置回 0 秒。
在这个例子中,Brain 将在等待 2 秒后打印当前时间,然后再重置其计时器。
当开始
等待 (2) 秒
在 [Brain v] 上打印 (计时器秒数) ◀ 并设定光标为下一行
重置计时器
在 [Brain v] 上打印 (计时器秒数) ◀ 并设定光标为下一行
计时器值#
计时器值块用于报告 IQ Brain 计时器的值(以秒为单位)。
(计时器秒数)
计时器在程序启动时从 0 秒开始,并以十进制值报告计时器的值。
在这个例子中,Brain 将在等待 2 秒后打印当前时间,然后再重置其计时器。
当开始
等待 (2) 秒
在 [Brain v] 上打印 (计时器秒数) ◀ 并设定光标为下一行
重置计时器
在 [Brain v] 上打印 (计时器秒数) ◀ 并设定光标为下一行
光标列#
光标列块用于报告 IQ Brain 屏幕光标位置的列号。
(光标列数)
光标列块将报告 1-80 之间的值,并将在项目开始时从第 1 列开始。
在这个例子中,Brain 将打印光标当前所在列的编号。
当开始
在 [Brain v] 上打印 (光标列数) ◀ 并设定光标为下一行
光标行#
Cursor Row 块用于报告 IQ Brain 屏幕光标位置的行号。
(光标行数)
光标行块将报告 1-9 之间的值,并将在项目开始时从第 1 行开始。
在这个例子中,Brain 将打印光标当前所在行的行号。
当开始
在 [Brain v] 上打印 (光标行数) ◀ 并设定光标为下一行
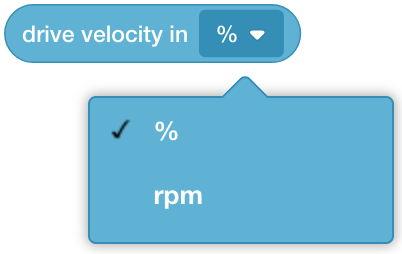
电池容量#
电池容量块用于报告 IQ Brain 电池的充电水平。
(battery capacity in %)
电池容量块报告的范围从 0% 到 100%。
在这个例子中,大脑将在大脑的屏幕上打印其当前电池电量。
当开始
在 [Brain v] 上打印 (battery capacity in %) ◀ 并设定光标为下一行
控制器感应#
控制器按下#
Controller Pressed 块用于报告 IQ 控制器上的按钮是否被按下。
<Controller [E ▲ v] 按下了?>
当按下选定的控制器按钮时,Controller Pressed 块会报告“True”。
当未按下所选控制器按钮时,Controller Pressed 块将报告“False”。
在这个例子中,当控制器上的 R ▲ 按钮第一次被按下时,大脑会在其屏幕上打印一条消息。
当开始
[Don't print the message until the R ▲ button is pressed.]
等到 <Controller [R ▲ v] 按下了?>
在 [Brain v] 上打印 [R ▲ Button pressed.] ◀ 并设定光标为下一行
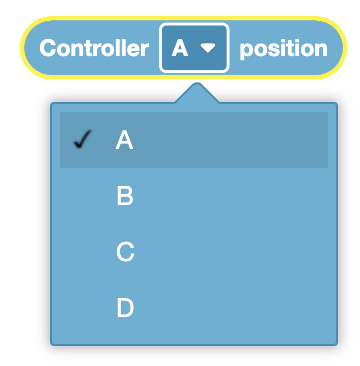
控制员职位#
控制器位置块用于报告 IQ 控制器上操纵杆沿轴的位置。
(Controller [A v] 位移)
控制器的位置块报告的范围从 -100 到 100。
当操纵杆轴位于中心时,控制器的位置块报告 0。
选择操纵杆的轴。
在这个例子中,Brain 将打印 IQ Controller 操纵杆的 C 轴。
当开始
在 [Brain v] 上打印 (Controller [C v] 位移) ◀ 并设定光标为下一行
控制器启用/禁用#
控制器启用/禁用块用于从设备菜单启用或禁用控制器配置的操作。
控制器 [Disable v]
参数 |
描述 |
|---|---|
状态 |
将控制器设置为什么状态:
|
例子
当开始
[Disable controller configured actions until drive is done.]
控制器 [Disable v]
驱动 [向前 v] (6) [英寸 v] ▶
控制器 [Enable v]
电机传感#
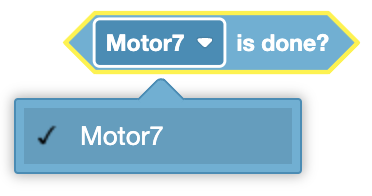
电机完成了吗?#
**电机是否完成?**块用于报告所选的 IQ 智能电机或电机组是否已完成其运动。
<[Motor 7 v] 已结束?>
当选定的电机或电机组完成其运动时,**电机完成了吗?**块会报告“True”。
当选定的电机或电机组仍在运动时,**电机是否完成?**块会报告“False”。
选择要使用的电机或电机组。
电机在旋转吗?#
**电机正在旋转?**块用于报告所选的 IQ 智能电机或电机组当前是否正在移动。
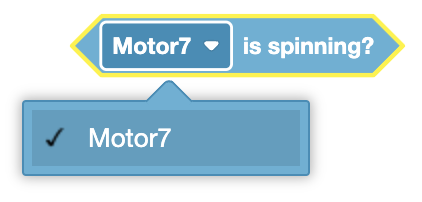
当选定的电机或电机组正在移动时,**电机正在旋转?**块会报告“True”。
当选定的电机或电机组没有移动时,**电机是否旋转?**块会报告“False”。
选择要使用的电机或电机组。
<[Motor 7 v] 正在转?>
电机位置#
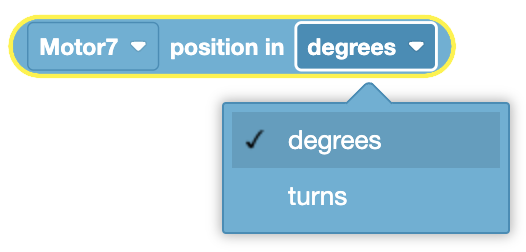
电机位置块用于报告 IQ 智能电机或电机组的第一个电机行驶的距离。
([Motor 7 v] 转位 [度 v] :: custom-sensing)
选择要使用的电机或电机组。
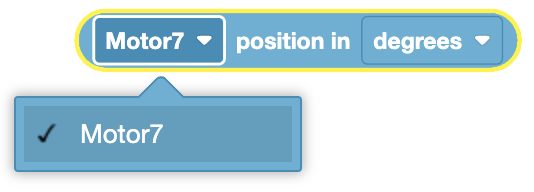
选择报告的单位,度或转。
在这个例子中,电机将向前旋转 1 秒,然后其当前位置才会打印在大脑的屏幕上。
当开始
[Spin Motor7 forward for 1 second.]
[Motor 7 v] [向前 v] 转
等待 (1) 秒
[Print Motor7's current position in degrees.]
在 [Brain v] ▶上打印 ([Motor 7 v] 转位 [度 v] :: custom-sensing)
电机转速#
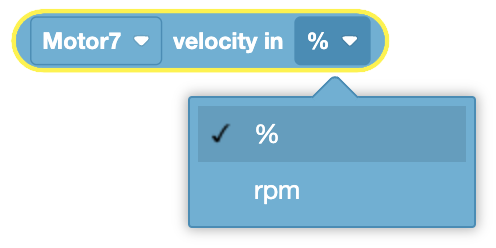
电机速度块用于报告 IQ 智能电机或电机组第一个电机的当前速度。
([Motor 7 v] 速度 [% v] 值)
电机速度块报告的范围从 -100% 到 100% 或 -600rpm 到 600rpm。
选择要使用的电机或电机组。
选择报告的单位,百分比(%)或rpm。
在这个例子中,电机将向前旋转 1 秒,然后其当前速度才会打印在大脑的屏幕上。
当开始
[Spin Motor 7 forward for 1 second.]
[Motor 7 v] [向前 v] 转
等待 (1) 秒
[Print Motor7's current velocity in rpm.]
在 [Brain v] ▶上打印 ([Motor 7 v] 速度 [rpm v] 值)
电机电流#
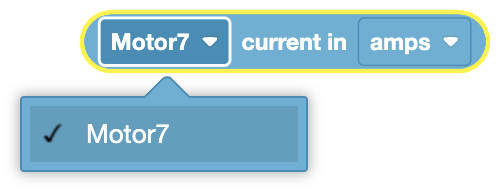
电机电流块用于报告 IQ 智能电机或电机组所吸收的电流量(以安培 (amps) 为单位)。
([Motor 7 v] 电流 [amps v])
选择要使用的电机或电机组。
在这个例子中,电机将向前旋转 1 秒,然后其电流才会打印在大脑的屏幕上。
当开始
[Spin Motor7 forward for 1 second.]
[Motor 7 v] [向前 v] 转
等待 (1) 秒
[Print Motor7's current velocity in amps.]
在 [Brain v] ▶上打印 ([Motor 7 v] 电流 [amps v])
动力传动系统传感#
驾驶完成了吗?#
**驱动完成?**块用于报告传动系统是否已完成其运动。
<驱动已结束?>
当传动系统的电机完成运动时,**驱动完成?**块会报告“True”。
当传动系统的电机仍在运转时,**驱动完成?**块会报告“False”。
驱动器正在移动?#
**驱动器正在移动?**块用于报告传动系统当前是否正在移动。
<驱动进行中?>
当传动系统的电机正在移动时,**驱动器正在移动?**块报告“True”。
当传动系统的电机没有移动时,**驱动器正在移动?**块会报告“False”。
驾驶航向#
Drive Heading 模块用于通过使用惯性传感器的当前角度位置来报告传动系统所面向的方向。
(底盘归位角度值)
Drive Heading 块报告的范围是从 0.0 到 359.99 度。
在这个例子中,传动系统将向右转 1 秒钟,然后其当前航向才会打印在 Brain 的屏幕上。
当开始
[Turn towards the right for 1 second.]
[右 v] 转
等待 (1) 秒
[Print Drivetrain's current heading after 1 second.]
在 [Brain v] 上打印 (底盘归位角度值) ◀ 并设定光标为下一行
驱动旋转#
驱动旋转块用于报告传动系统的旋转角度。
(底盘转向角度值)
顺时针方向报告为正值,逆时针方向报告为负值。
在这个例子中,传动系统将向左转 1 秒,然后其当前旋转才会打印在 Brain 的屏幕上。
当开始
[Turn towards the right for 1 second.]
[右 v] 转
等待 (1) 秒
[Print Drivetrain's current rotation after 1 second.]
在 [Brain v] 上打印 (底盘转向角度值) ◀ 并设定光标为下一行
驱动速度#
驱动速度块用于报告传动系统的当前速度。
(驱动速度 [% v])
驱动速度块报告的范围从 -100% 到 100% 或 -600rpm 到 600rpm。
选择报告的单位,百分比(%)或rpm。
在这个例子中,传动系统将向前行驶 1 秒,然后其当前速度才会打印在 Brain 的屏幕上。
当开始
[Drive forward for 1 second.]
驱动 [向前 v]
等待 (1) 秒
[Print Drivetrain's current velocity after 1 second.]
在 [Brain v] 上打印 (驱动速度 [% v]) ◀ 并设定光标为下一行
驱动电流#
驱动电流块用于报告传动系统当前使用的电流量(功率)。
(驱动电流 [amps v])
在这个例子中,传动系统将向前行驶 1 秒,然后其电流才会打印在大脑的屏幕上。
当开始
[Drive forward for 1 second.]
驱动 [向前 v]
等待 (1) 秒
[Print Drivetrain's current after 1 second.]
在 [Brain v] 上打印 (驱动电流 [amps v]) ◀ 并设定光标为下一行
保险杠传感#
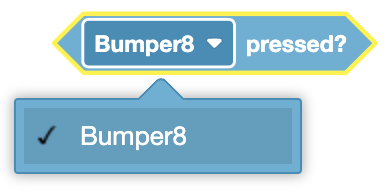
保险杠压合#
Bumper Pressed 块用于报告保险杠开关是否被按下。
<[Bumper 8 v] 按下了?>
当按下选定的保险杠开关时,保险杠按下块会报告“True”。
当未按下选定的保险杠开关时,保险杠按下块将报告“False”。
选择要使用的保险杠开关。
在这个例子中,第一次按下保险杠开关时,大脑将在其屏幕上打印一条消息。
当开始
[Don't print the message until the bumper is pressed.]
等到 <[Bumper 8 v] 按下了?>
在 [Brain v] ▶上打印 [Bumper was pressed.]
触摸LED感应#
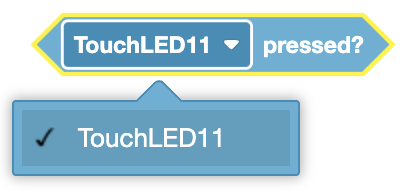
触摸 LED 按下#
触摸 LED 按下 块用于报告限位开关是否被按下。
<[TouchLED 11 v] 按下了?>
当按下选定的触摸 LED 时,触摸 LED 按下块会报告“True”。
当未按下选定的触摸 LED 时,触摸 LED 按下块将报告“False”。
选择要使用的限位开关。
在这个例子中,第一次按下触摸 LED 时,Brain 会在其屏幕上打印一条消息。
当开始
[Don't print the message until the Touch LED Sensor is pressed.]
等到 <[TouchLED 11 v] 按下了?>
在 [Brain v] 上打印 [Touch LED was pressed.] ◀ 并设定光标为下一行
陀螺仪感应#
校准陀螺仪#
校准陀螺仪模块用于校准 VEX IQ 陀螺仪传感器,以减少陀螺仪传感器产生的漂移量。
陀螺仪传感器在校准过程中必须保持静止。
[Gyro 5 v] 校准 [2 v] 秒
选择要使用的陀螺仪传感器。
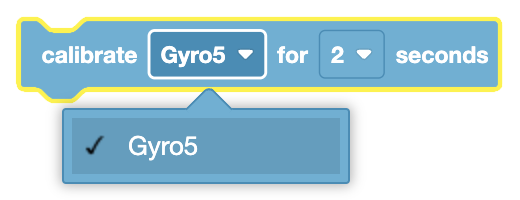
选择校准陀螺仪传感器的时间长度:
2秒
4秒
8秒
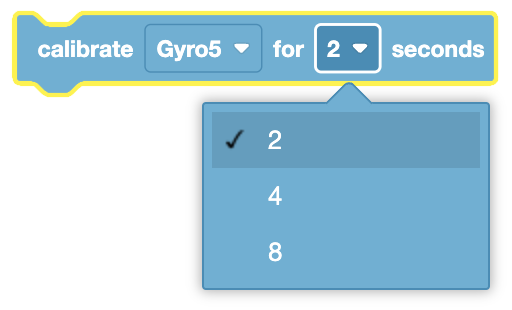
在这个例子中,Brain 的陀螺仪传感器将校准 2 秒,然后打印陀螺仪传感器的当前航向。
当开始
[Gyro 5 v] 校准 [2 v] 秒
在 [Brain v] 上打印 ([Gyro 5 v] 归位角度值) ◀ 并设定光标为下一行
设置标题#
设置航向块用于将陀螺仪传感器当前航向位置设置为指定值。
设定 [Gyro 5 v] 归位为 (0) 度
设置航向块接受 0.0 到 359.99 度的范围。
选择要使用的陀螺仪传感器。
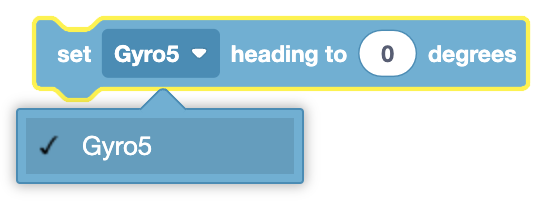
在这个例子中,Brain 的陀螺仪传感器将打印其起始航向,将其航向设置为 90 度,然后打印新的航向。
当开始
在 [Brain v] 上打印 ([Gyro 5 v] 归位角度值) ◀ 并设定光标为下一行
设定 [Gyro 5 v] 归位为 (90) 度
在 [Brain v] 上打印 ([Gyro 5 v] 归位角度值) ◀ 并设定光标为下一行
设置旋转#
设置旋转块用于将陀螺仪传感器当前旋转位置设置为指定值。
设定 [Gyro 5 v] 转向为 (0) 度
设置旋转块接受任何正数或负数小数或整数。
选择要使用的陀螺仪传感器。
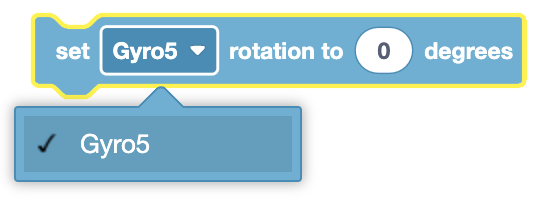
在这个例子中,Brain 的陀螺仪传感器将打印其起始旋转,将其旋转设置为 -100 度,然后打印新的旋转。
当开始
在 [Brain v] 上打印 ([Gyro 5 v] 转向角度值) ◀ 并设定光标为下一行
设定 [Gyro 5 v] 转向为 (-100) 度
在 [Brain v] 上打印 ([Gyro 5 v] 转向角度值) ◀ 并设定光标为下一行
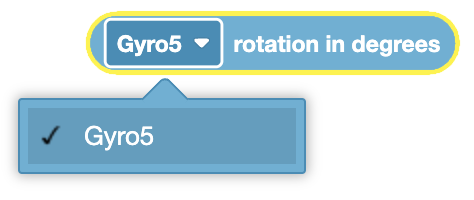
航向角#
航向角块用于报告 VEX IQ 陀螺仪传感器的当前航向(以度为单位)。
([Gyro 5 v] 归位角度值)
航向角块报告的范围是 0.0 到 359.99 度。
选择要使用的陀螺仪传感器。
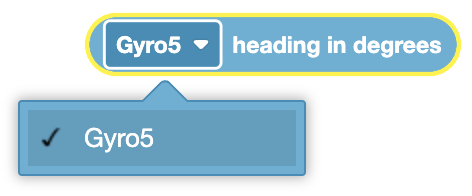
在这个例子中,Brain 的陀螺仪传感器将打印其起始航向,将其航向设置为 90 度,然后打印新的航向。
当开始
在 [Brain v] 上打印 ([Gyro 5 v] 归位角度值) ◀ 并设定光标为下一行
设定 [Gyro 5 v] 归位为 (90) 度
在 [Brain v] 上打印 ([Gyro 5 v] 归位角度值) ◀ 并设定光标为下一行
旋转角度#
旋转角度块用于报告 VEX IQ 陀螺仪传感器的当前旋转角度(以度为单位)。
([Gyro 5 v] 转向角度值)
顺时针方向报告为正值,逆时针方向报告为负值。
选择要使用的陀螺仪传感器。
在这个例子中,Brain 的惯性传感器将打印其起始旋转,将其旋转设置为 -100 度,然后打印新的航向。
当开始
在 [Brain v] 上打印 ([Gyro 5 v] 转向角度值) ◀ 并设定光标为下一行
设定 [Gyro 5 v] 转向为 (-100) 度
在 [Brain v] 上打印 ([Gyro 5 v] 转向角度值) ◀ 并设定光标为下一行
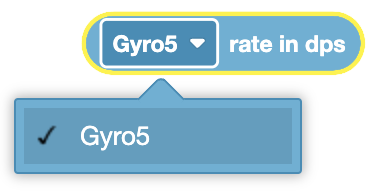
陀螺仪速率#
陀螺仪速率块用于报告 VEX IQ 陀螺仪传感器的角速度速率。
([Gyro 5 v] 角速度\(dps\))
陀螺仪速率块报告的范围在 0 到 249.99 dps 之间。
选择要使用的陀螺仪传感器。
在这个例子中,当前陀螺仪传感器的速率将被打印到大脑的屏幕上。
当开始
在 [Brain v] 上打印 ([Gyro 5 v] 角速度\(dps\)) ◀ 并设定光标为下一行
颜色感应#
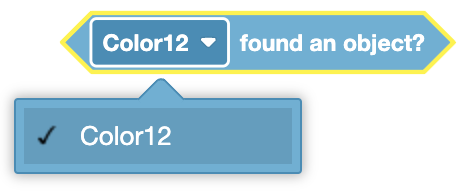
颜色传感器发现物体#
颜色传感器发现物体块用于报告 VEX IQ 颜色传感器是否检测到物体。
<[Color 12 v] 发现对象?>
当颜色传感器检测到靠近传感器前部的物体或表面时,颜色传感器发现物体块会报告“True”。
当颜色传感器未检测到靠近传感器前部的物体或表面时,颜色传感器发现物体块会报告“False”。
选择要使用的颜色传感器。
在这个例子中,当颜色传感器检测到一个物体时,它会向大脑打印一条消息。
当开始
[Don't print the message until the Color Sensor detects an object.]
等到 <[Color 12 v] 发现对象?>
在 [Brain v] 上打印 [Color Sensor detected an object.] ◀ 并设定光标为下一行
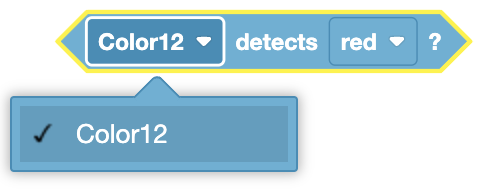
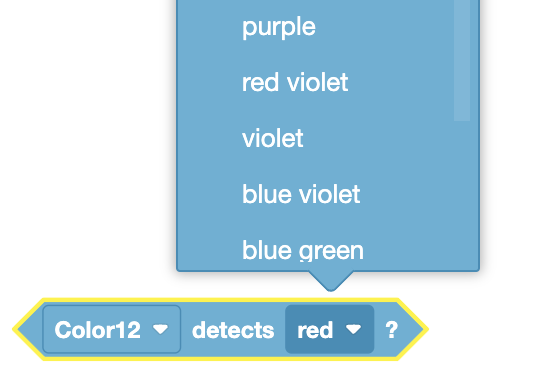
颜色传感器检测颜色#
颜色传感器检测颜色块用于报告 VEX IQ 颜色传感器是否检测到特定颜色。
<[Color 12 v] 测得 [红色 v]?>
当颜色传感器检测到所选颜色时,颜色传感器检测颜色块报告“真”。
当颜色传感器检测到与所选颜色不同的颜色时,颜色传感器检测颜色块会报告“False”。
选择要使用的颜色传感器。
选择要检测的颜色。
在这个例子中,当颜色传感器检测到绿色时,它会将检测到的颜色打印到大脑中。
当开始
[Don't print the message until the Color Sensor detects an the color green.]
等到 <[Color 12 v] 测得 [绿色 v]?>
在 [Brain v] 上打印 ([Color 12 v] 颜色) ◀ 并设定光标为下一行
颜色传感器颜色名称#
颜色传感器颜色名称块用于报告 VEX IQ 颜色传感器检测到的颜色的名称。
([Color 12 v] 颜色)
选择要使用的颜色传感器。

在这个例子中,当颜色传感器检测到绿色时,它会将检测到的颜色打印到大脑中。
当开始
[Don't print the message until the Color Sensor detects an the color green.]
等到 <[Color 12 v] 测得 [绿色 v]?>
在 [Brain v] 上打印 ([Color 12 v] 颜色) ◀ 并设定光标为下一行
颜色传感器亮度#
颜色传感器亮度块用于报告 VEX IQ 颜色传感器检测到的光量。
([Color 12 v] 亮度百分比)
选择要使用的颜色传感器。

在这个例子中,颜色传感器将把当前亮度打印到大脑。
当开始
在 [Brain v] 上打印 ([Color 12 v] 亮度百分比) ◀ 并设定光标为下一行
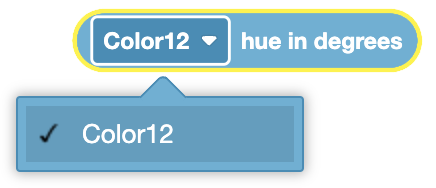
颜色传感器色调#
颜色传感器色调块用于报告 VEX IQ 颜色传感器检测到的颜色的色调。
颜色传感器色调块报告的范围从 0 到 360。
([Color 12 v] 色调度数)
选择要使用的颜色传感器。
在这个例子中,颜色传感器将把当前亮度打印到大脑。
当开始
在 [Brain v] 上打印 ([Color 12 v] 色调度数) ◀ 并设定光标为下一行
距离感应#
智商(第一代)#
要使用 IQ(第 1 代)距离感应块,您必须使用 IQ(第 1 代)距离传感器。
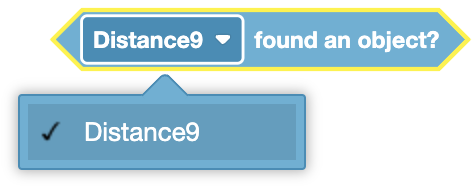
距离传感器发现物体#
距离传感器发现物体块用于报告距离传感器是否在其视野范围内看到物体。
<[Distance 9 v] 发现对象?>
当距离传感器在其视野范围内看到物体或表面时,距离传感器发现物体块会报告“True”。
当距离传感器未检测到物体或表面时,距离传感器发现物体块会报告“False”。
选择要使用的距离传感器。
在这个例子中,当距离传感器检测到一个物体时,它会打印它与检测到的物体之间的距离。
当开始
[Don't print the message until the Distance Sensor detects an object.]
等到 <[Distance 9 v] 发现对象?>
在 [Brain v] 上打印 ([Distance 9 v] 距离 [毫米 v]) ◀ 并设定光标为下一行
物距#
物体距离块用于报告距离传感器最近物体的距离。
([Distance 9 v] 距离 [毫米 v])
物体距离块报告的范围从 24 毫米到 1000 毫米或 1 英寸到 40 英寸。
选择要使用的距离传感器。
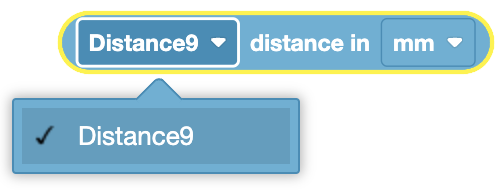
选择报告的单位:毫米 (mm) 或 英寸。
在这个例子中,当距离传感器检测到一个物体时,它会打印它与检测到的物体之间的距离。
当开始
[Don't print the message until the Distance Sensor detects an object.]
等到 <[Distance 9 v] 发现对象?>
在 [Brain v] 上打印 ([Distance 9 v] 距离 [毫米 v]) ◀ 并设定光标为下一行
智商(第二代)#
要使用 IQ(第二代)距离感应模块,您必须使用 IQ(第二代)距离传感器。
物距#
物体距离块用于报告距离传感器最近物体的距离。
([Distance 10 v] 对象距离 [毫米 v])
物体距离块报告的范围从 20 毫米到 2000 毫米。
选择要使用的距离传感器。
选择报告的单位:毫米 (mm) 或 英寸。
在这个例子中,当距离传感器检测到一个物体时,它会打印它与检测到的物体之间的距离。
当开始
[Don't print the message until the Distance Sensor detects an object.]
等到 <[Distance 10 v] 发现对象?>
在 [Brain v] 上打印 ([Distance 10 v] 对象距离 [毫米 v]) ◀ 并设定光标为下一行
物体速度#
物体速度块用于报告物体的当前速度,以米/秒(m/s)为单位。
([Distance 10 v] 对象速度m/s)
选择要使用的距离传感器。
在此示例中,距离传感器将报告其前方移动物体的当前速度。
当开始
在 [Brain v] 上打印 ([Distance 10 v] 对象速度m/s) ◀ 并设定光标为下一行
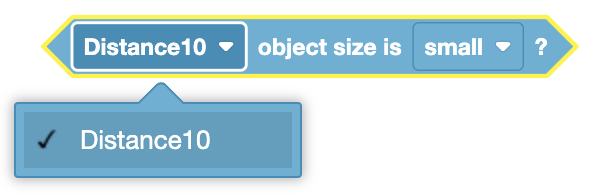
对象大小是#
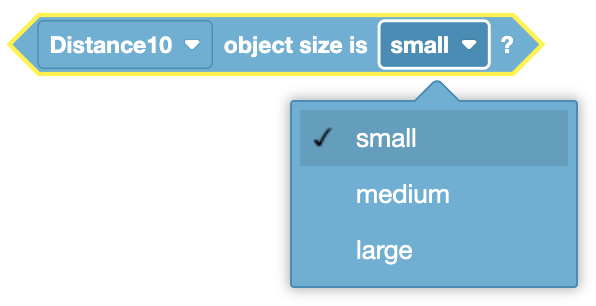
物体尺寸块用于报告距离传感器是否检测到指定的物体尺寸。
<[Distance 10 v] 对象尺寸 [小 v]?>
距离传感器根据反射并返回到传感器的光量来确定检测到的物体的大小(无、小、中、大)。
当距离传感器检测到指定尺寸时,物体尺寸是块报告“True”。
当距离传感器未检测到指定尺寸时,物体尺寸块会报告“False”。
选择要使用的距离传感器。
选择您希望物体传感器检查的物体的尺寸。
小的
中等的
大的
在这个例子中,如果距离传感器检测到一个小物体,它就会向前行驶,直到物体变大。
当开始
[Check if the Distance Sensor sees a small object.]
如果 <[Distance 10 v] 对象尺寸 [小 v]?> 那么
[If a small object is detected, drive forward.]
驱动 [向前 v]
[Wait until the small detected object is large.]
等到 <[Distance 10 v] 对象尺寸 [大 v]?>
[When the object size is large, stop driving.]
驱动停止
结束
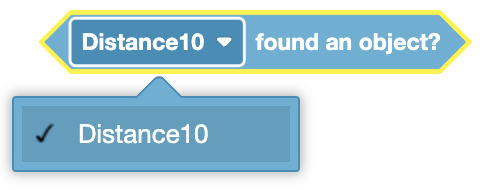
距离传感器发现物体#
距离传感器发现物体块用于报告距离传感器是否在其视野范围内看到物体。
<[Distance 10 v] 发现对象?>
当距离传感器在其视野范围内看到物体或表面时,距离传感器发现物体块会报告“True”。
当距离传感器未检测到物体或表面时,距离传感器发现物体块会报告“False”。
选择要使用的距离传感器。
在这个例子中,当距离传感器检测到一个物体时,它会打印它与检测到的物体之间的距离。
当开始
[Don't print the message until the Distance Sensor detects an object.]
等到 <[Distance 10 v] 发现对象?>
在 [Brain v] 上打印 ([Distance 10 v] 对象距离 [毫米 v]) ◀ 并设定光标为下一行
光学传感#
设置光学灯#
设置光学光源 模块用于设置光学传感器上的光源为开启或关闭状态。当光学传感器在黑暗环境中观察物体时,光源可以让传感器看到物体。
设定 [Optical 7 v] 灯 [on v]
选择要使用的光学传感器。
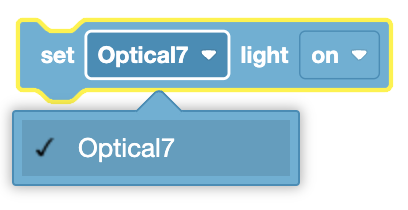
选择打开或关闭灯。
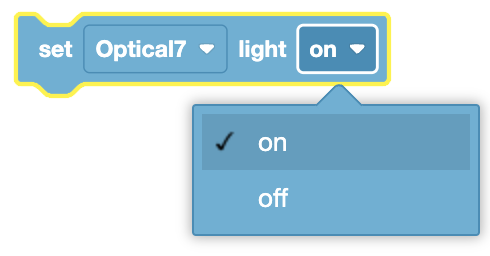
在此示例中,光学传感器将打开灯两秒钟,然后再关闭。
当开始
设定 [Optical 7 v] 灯 [on v]
等待 (2) 秒
设定 [Optical 7 v] 灯 [灭 v]
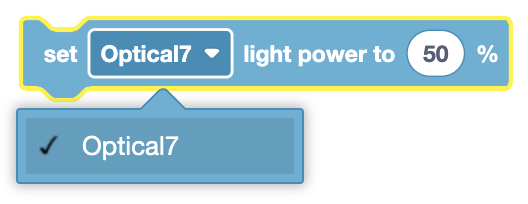
设置光功率#
设置光功率模块用于设置光学传感器的光功率
set [Optical7 v] light power to (50)%
设置光功率 模块接受 0% 到 100% 的设置值。这将改变光学传感器上的灯光亮度。如果灯光关闭,该模块将打开灯光。
选择要使用的光学传感器。
在此示例中,光学传感器的电源灯设置为 75%,然后等待检测到物体以打印消息。
当开始
设定辨色仪灯功率为 (75)%
[Wait until the Eye Sensor detects an object.]
等到 <辨色仪发现一个对象?>
打印 [Object detected.] ◀ 并设定光标为下一行
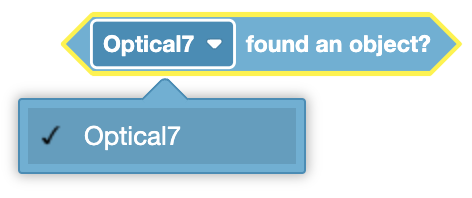
光学传感器发现物体#
光学传感器发现物体块用于报告光学传感器是否检测到靠近它的物体。
<辨色仪发现一个对象?>
当光学传感器检测到靠近它的物体时,光学传感器发现物体块会报告“True”。
当物体不在光学传感器的范围内时,光学传感器发现物体块会报告“False”。
选择要使用的光学传感器。
在此示例中,光学传感器的电源灯设置为 75%,然后等待检测到物体以打印消息。
当开始
设定辨色仪灯功率为 (75)%
[Wait until the Eye Sensor detects an object.]
等到 <辨色仪发现一个对象?>
打印 [Object detected.] ◀ 并设定光标为下一行
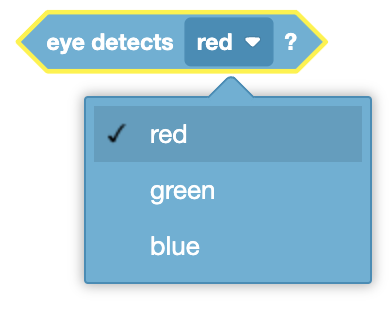
光学传感器检测颜色#
光学传感器检测颜色块用于报告光学传感器是否检测到指定的颜色。
<辨色仪测得 [红色 v]?>
当光学传感器检测到指定颜色时,光学传感器检测颜色块报告“真”。
当光学传感器未检测到指定颜色时,光学传感器检测颜色块会报告“False”。
选择要使用的光学传感器。
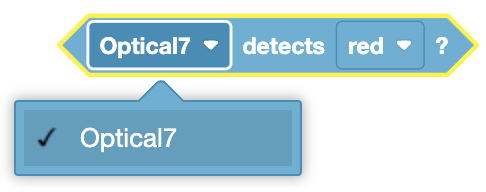
选择光学传感器将检查的颜色。
在这个例子中,光学传感器将等到检测到红色后才将该颜色打印在大脑的屏幕上。
当开始
[Wait until the Eye Sensor detects the color red.]
等到 <辨色仪测得 [红色 v]?>
打印 [Color red detected.] ◀ 并设定光标为下一行
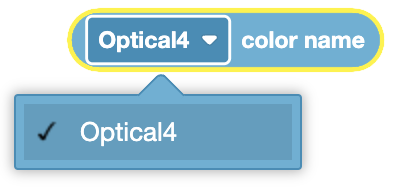
光学传感器颜色名称#
光学传感器颜色名称块用于报告 VEX IQ 光学传感器检测到的颜色的名称。
([Optical 4 v] 颜色)
颜色名称块报告以下颜色之一:
红色的
绿色的
蓝色的
黄色的
橙子
紫色的
青色
选择要使用的光学传感器。
在这个例子中,光学传感器将等到检测到红色后才将该颜色打印在大脑的屏幕上。
当开始
[Wait until the Eye Sensor detects the color red.]
等到 <辨色仪测得 [红色 v]?>
打印 [Color red detected.] ◀ 并设定光标为下一行
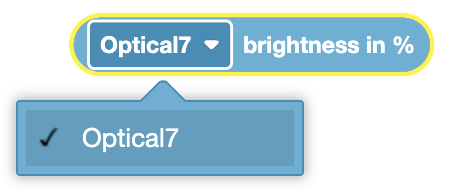
光学亮度#
光学亮度块用于报告光学传感器检测到的光量。
(辨色仪亮度百分比)
光学亮度块报告从 0% 到 100% 的数值。
检测到的大量光将报告高亮度值。
检测到少量光时将报告较低的亮度值。
选择要使用的光学传感器。
在这个例子中,光学传感器将把当前亮度值打印到大脑的屏幕上。
当开始
打印 (辨色仪亮度百分比) ◀ 并设定光标为下一行
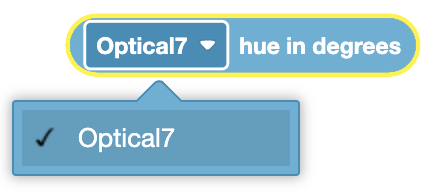
光学色调#
光学色调块用于报告物体颜色的色调。
(辨色仪色度值)
光学色调 模块返回一个数值,该数值表示物体颜色的色调。它返回一个介于 0 到 359 之间的数字。
该值可以被认为是颜色在色轮上的位置(以度为单位)。
选择要使用的光学传感器。
在这个例子中,光学传感器将把当前看到的色调打印到大脑的屏幕上。
当开始
打印 (辨色仪色度值) ◀ 并设定光标为下一行
视觉传感#
拍摄视觉传感器快照#
拍摄视觉传感器快照 模块会过滤来自视觉传感器帧的数据。视觉传感器可以检测包含已配置颜色和颜色代码的签名。
必须先在 Vision Utility 中配置颜色和颜色代码,然后才能将其与该块一起使用。
该数据集按宽度从大到小排序存储对象,从项目 1 开始。可以使用 Vision object property 块访问每个对象的属性。如果未检测到匹配的对象,则返回空数据集。
[Vision 1 v] 拍照 [SELECT_A_SIG v]
范围 |
描述 |
|---|---|
想象 |
要使用的视觉传感器,在设备窗口中配置。 |
签名 |
快照中要分析的颜色特征或颜色代码。 |
例子
当开始
[Move forward if a red box is detected.]
永久循环
[Vision 1 v] 拍照 [RED_BOX v]
如果 <[Vision 1 v] 对象存在?> 那么
驱动 [向前 v] [10] [毫米 v] ▶
设置视觉传感器对象项#
设置视觉传感器对象项块设置要使用数据集中的哪个项。
设定 [Vision 1 v] 对象标号为 (1)
范围 |
描述 |
|---|---|
想象 |
要使用的视觉传感器,在设备窗口中配置。 |
物品 |
数据集中要使用的项目数量。 |
例子
当开始
[Display the largest detected red object.]
永久循环
[Vision 1 v] 拍照 [RED_BOX v]
清除 [Brain v] 所有行
在 [Brain v] 设定光标至 [1] 行 [1] 列
如果 <[Vision 1 v] 对象存在?> 那么
设定 [Vision 1 v] 对象标号为 (1)
在 [Brain v] ▶上打印 ([Vision 1 v] 对象 [宽 v])
结束
等待 [0.5] 秒
视觉传感器物体计数#
视觉传感器对象计数块以整数形式返回数据集中检测到的对象的数量。
([Vision 1 v] 对象数目)
范围 |
描述 |
|---|---|
想象 |
要使用的视觉传感器,在设备窗口中配置。 |
例子
当开始
[Display the amount of red objects.]
永久循环
清除 [Brain v] 所有行
在 [Brain v] 设定光标至 [1] 行 [1] 列
[Vision 1 v] 拍照 [RED_BOX v]
如果 <[Vision 1 v] 对象存在?> 那么
在 [Brain v] ▶上打印 ([Vision 1 v] 对象数目)
结束
等待 [0.5] 秒
视觉传感器对象存在吗?#
**视觉传感器对象是否存在?**块返回一个布尔值,指示是否在数据集中检测到任何对象。
真 – 数据集包含检测到的对象。
错误 – 数据集不包含任何检测到的对象。
<[Vision 1 v] 对象存在?>
范围 |
描述 |
|---|---|
想象 |
要使用的视觉传感器,在设备窗口中配置。 |
例子
当开始
[Move forward if a red box is detected.]
永久循环
[Vision 1 v] 拍照 [RED_BOX v]
如果 <[Vision 1 v] 对象存在?> 那么
驱动 [向前 v] [10] [毫米 v] ▶
视觉传感器对象属性#
使用 拍摄视觉传感器快照 块 后存储的每个对象(如下所示)包含五个属性。
([Vision 1 v] 对象 [宽 v])
某些属性值基于使用 拍摄视觉传感器快照 块 时检测到的物体在视觉传感器视图中的位置。视觉传感器的分辨率为 316 x 212 像素。
范围 |
描述 |
|---|---|
想象 |
要使用的视觉传感器,在设备窗口中配置。 |
财产 |
使用检测到的对象的哪个属性: |
宽度#
width 以像素为单位返回检测到的对象的宽度,范围是 0 到 316 之间的整数。
([Vision 1 v] 对象 [宽 v])
例子
当开始
[Move towards a red object until its width is larger than 100 pixels.]
永久循环
[Vision 1 v] 拍照 [RED_BOX v]
如果 <[Vision 1 v] 对象存在?> 那么
如果 <([Vision 1 v] 对象 [宽 v]) [math_less_than v] [100]> 那么
驱动 [向前 v]
结束
否则
驱动停止
高度#
高度以像素为单位返回检测到的物体的高度,范围是 0 到 212 之间的整数。
([Vision 1 v] 对象 [高 v])
例子
当开始
[Move towards a red object until its height is larger than 100 pixels.]
永久循环
[Vision 1 v] 拍照 [RED_BOX v]
如果 <[Vision 1 v] 对象存在?> 那么
如果 <([Vision 1 v] 对象 [高 v]) [math_less_than v] [100]> 那么
驱动 [向前 v]
结束
否则
驱动停止
中心X#
centerX 以像素为单位返回检测到的物体中心的 x 坐标,为 0 到 316 之间的整数。
([Vision 1 v] 对象 [中心X坐标 v])
例子
当开始
[Turn slowly until a red object is centered in front of the Vision Sensor.]
设定转向速度为 [30] [% v]
[右 v] 转
永久循环
[Vision 1 v] 拍照 [RED_BOX v]
如果 <[Vision 1 v] 对象存在?> 那么
如果 <<[140] [math_less_than v] ([Vision 1 v] 对象 [中心X坐标 v])> 与 <([Vision 1 v] 对象 [中心X坐标 v]) [math_less_than v] [180]>> 那么
驱动停止
中心Y#
centerY 以像素为单位返回检测到的物体中心的 y 坐标,为 0 到 212 之间的整数。
([Vision 1 v] 对象 [中心Y坐标 v])
例子
当开始
[Move towards a red object until its center y-coordinate is more than 140 pixels.]
永久循环
[Vision 1 v] 拍照 [RED_BOX v]
如果 <[Vision 1 v] 对象存在?> 那么
如果 <([Vision 1 v] 对象 [中心Y坐标 v]) [math_less_than v] [140]> 那么
驱动 [向前 v]
结束
否则
驱动停止
角度#
角度以 0 至 180 度之间的整数形式返回检测到的颜色代码的方向。
([Vision 1 v] 对象 [夹角 v])
例子
当开始
[Turn left or right depending on how the Color Code is rotated.]
永久循环
[Vision 1 v] 拍照 [BOX_CODE v]
如果 <[Vision 1 v] 对象存在?> 那么
如果 <<[70] [math_less_than v] ([Vision 1 v] 对象 [夹角 v])> 与 <([Vision 1 v] 对象 [夹角 v]) [math_less_than v] [110]>> 那么
[右 v] 转 (45) 度 ▶
否则如果 <<[250] [math_less_than v] ([Vision 1 v] 对象 [夹角 v])> 与 <([Vision 1 v] 对象 [夹角 v]) [math_less_than v] [290]>> 那么
[左 v] 转 (45) 度 ▶
否则
驱动停止
结束