活动#
何时开始#
启动时块用于在项目启动时运行附加的块堆栈。
当开始
当从 VEXcode 中的“开始”按钮启动项目时,将运行“启动时”事件。
所有新项目将自动包含“启动时”块。
本例中使用 启动时 模块来启动项目。当选择启动按钮时,机器人将向前行驶、右转,然后再次向前行驶。
当开始
驱动 [向前 v] (200) [毫米 v] ▶
[右 v] 转 (90) 度 ▶
驱动 [向前 v] (200) [毫米 v] ▶
当自主#
比赛期间,场地控制系统会使用自主模式。有关 V5 Blocks 比赛模板的更多信息,请点击此处。
当从竞赛场或竞赛开关接收到“自主”模式信号时,自主时块用于运行附加的块堆栈。
当自控
在这个例子中,当接收到“自主”模式信号时,触发自主时块,使机器人向右旋转九十度。
当自控
[右 v] 转 (90) 度 ▶
当驾驶员控制#
比赛期间,驾驶控制模式与场地控制系统配合使用。有关 V5 Blocks 比赛模板的更多信息,请点击此处。
当从竞赛场或竞赛开关接收到“驾驶员控制”模式信号时,当驾驶员控制块用于运行附加的块堆栈。
当遥控
在这个例子中,当接收到“驾驶员控制”模式信号时,当驾驶员控制块被触发,从而启用控制器。
当遥控
控制器 [Enable v]
当保险杠#
保险杠开关是一款三线传感器,可与 V5 大脑配合使用。有关保险杠开关的更多信息,请阅读使用 V5 3 线保险杠开关 v2 和限位开关。
当按下或释放选定的保险杠开关传感器时,当保险杠块用于运行附加的块堆栈。
当 [BumperB v] [pressed v]
选择要使用的保险杠。
选择哪个动作将触发事件 - 按下或释放。
在这个例子中,当按下保险杠开关传感器时,大脑上会打印一条消息。
当 [BumperB v] [pressed v]
在 [Bumper has been pressed.] 上打印 [Brain v] ◀ 并设定光标为下一行
当限制#
限位开关是一个三线传感器,可与 V5 大脑配合使用。有关限位开关的更多信息,请阅读使用 V5 3 线保险杠开关 v2 和限位开关。
当按下或释放选定的限位开关传感器时,当限位块用于运行附加的块堆栈。
当 [LimitSwitchA v] [pressed v]
选择要使用的限位开关。
选择哪个动作将触发事件 - 按下或释放。
在这个例子中,当限位开关传感器被按下时,一条消息将被打印在大脑上。
当 [LimitSwitchA v] [pressed v]
在 [Limit Switch has been pressed.] 上打印 [Brain v] ◀ 并设定光标为下一行
当控制器轴#
为了使控制器块出现在 VEXcode 中,必须首先将 V5 控制器连接到 VEXcode V5。
请参阅以下文章以了解更多信息:
当选定的 V5 控制器操纵杆轴移动时,当控制器轴块用于运行附加的块堆栈。
当Controller [1 v] 轴改变
选择要使用的 V5 控制器操纵杆轴。
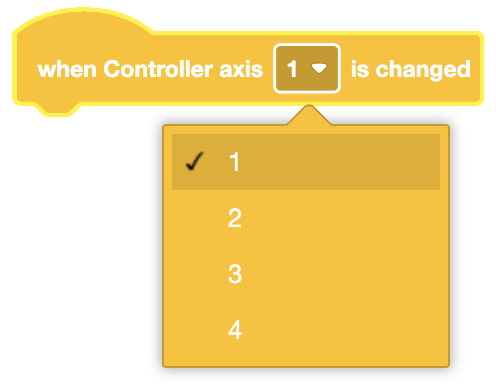
在此示例中,移动 V5 控制器上的 4th 操纵杆轴将打印一条消息。
当Controller [4 v] 轴改变
在 [Controller axis 4 moved.] 上打印 [Brain v] ◀ 并设定光标为下一行
当大脑筛查#
当按下或释放 V5 Brain 的触摸屏时,当大脑屏幕块用于运行附加的块堆栈。
当Brain屏幕 [pressed v]
选择哪个动作将触发事件块:按下或释放。
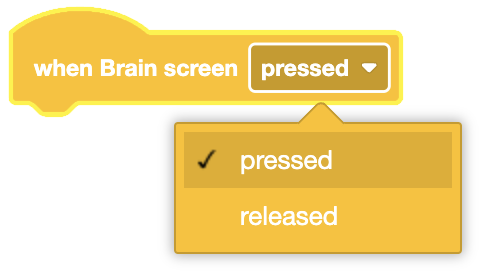
在这个例子中,按下 V5 Brain 的触摸屏将会在屏幕上出现一条消息。
当Brain屏幕 [pressed v]
在 [You pressed the touchscreen!] 上打印 [Brain v] ◀ 并设定光标为下一行
当计时器#
当大脑的计时器等于给定值时,当计时器块用于运行附加的块堆栈。
当计时器> [1] 秒
大脑的计时器在每个项目开始时或每次重置大脑的计时器时启动。
选择时间量。当 Brain 的计时器达到输入的时间量时,计时器事件就会运行。
当计时器> [3.25] 秒
在这个例子中,5秒后,机器人将把消息打印到打印控制台。
当计时器> [5] 秒
打印 [5 seconds have passed.] ▶
当我收到#
当我收到块用于在从广播消息中接收到选定的消息时运行附加的块堆栈。
当我收到 [message1 v]
选择要监听的消息。也可以创建新消息。
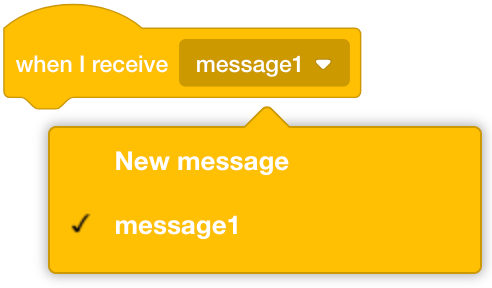
在此示例中,代码将持续检查左传感器保险杠是否被按下。一旦按下,当我收到积木,就会在收到 bumper_press 消息后触发。
当开始
永久循环
如果 <[LeftBumper v] 按下了?> 那么
广播 [bumper_press v]
结束
结束
当我收到 [bumper_press v]
打印 [Bumper has been pressed.] ▶
播送#
广播块用于广播消息,以激活任何以当我收到块开头的堆栈,监听广播的消息。
广播 [message1 v]
发送广播的堆栈将与接收广播消息的其他堆栈同时继续运行块。
选择要广播的消息。也可以创建新消息。

在此示例中,代码将持续检查左传感器保险杠是否被按下。一旦按下,广播 积木将触发当我收到 积木,并发送消息“bumper_press”。
当开始
永久循环
如果 <[LeftBumper v] 按下了?> 那么
广播 [bumper_press v]
结束
结束
当我收到 [bumper_press v]
打印 [Bumper has been pressed.] ▶
广播并等待#
广播和等待块用于广播消息以激活任何以当我收到块开头的堆栈,监听广播的消息,同时暂停堆栈的其余部分。
该块广播一条消息以激活以“当我收到块时”开头的任何堆栈,该块监听广播的消息,同时暂停堆栈的其余部分。
广播 [message1 v] 并等待
发送广播并等待的堆栈将暂停,直到接收广播消息的其他堆栈完成。
选择要广播的消息。也可以创建新消息。
在此示例中,代码将持续检查左侧传感器保险杠是否被按下。按下后,广播并等待块将触发当我收到块,并发送消息“bumper_press”。启动时块下的任何代码都不会执行,直到“bumper_press”当我收到块下的所有代码都完成为止。
当开始
永久循环
如果 <[LeftBumper v] 按下了?> 那么
广播 [bumper_press v] 并等待
结束
结束
当我收到 [bumper_press v]
[右 v] 转 [90] 度 ▶
当光学传感器#
光学传感器必须连接到 V5 大脑并在 VEXcode V5 中配置后才能在项目中使用。有关光学传感器的更多信息,请阅读将光学传感器与 VEX V5 配合使用。
当选定的光学传感器检测到或丢失物体时,当光学传感器块用于运行附加的块堆栈。
当 [Optical 7 v] [detects v] 一个对象
选择光学传感器。
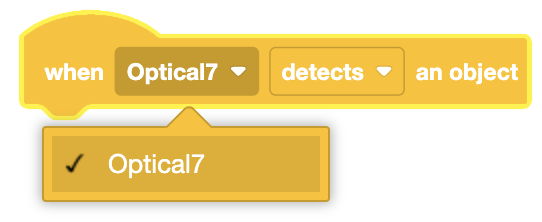
选择当传感器检测到物体或丢失物体时是否触发“光学检测到/丢失”事件。
在这个例子中,一旦光学传感器检测到一个物体,就会向大脑打印一条消息。
当 [Optical 7 v] [detects v] 一个对象
在 [Optical Sensor has detected an object.] 上打印 [Brain v] ◀ 并设定光标为下一行
当 GPS 航向改变时#
首先需要配置 GPS(游戏定位系统)传感器才能在 VEXcode V5 中使用。有关如何配置 GPS 传感器的指南,请阅读在 VEXcode V5 中配置 GPS 传感器。有关 GPS 传感器工作原理的更多信息,请阅读在 VEX V5 中使用 GPS 传感器。
The When GPS Heading Changed block is used to run the attached stack of blocks when a GPS Sensor detects a heading change.
当 [GPS 15 v] 方向改变
选择 GPS 传感器。
在这个例子中,一旦 GPS 传感器检测到航向变化,它就会重新调整方向,面向 0 度航向。
当 [GPS 15 v] 方向改变
归位至 (0) 度 ▶