Detección#
Detección cerebral#
Reiniciar temporizador#
El bloque Restablecer temporizador se utiliza para restablecer el temporizador del robot.
reiniciar el temporizador
El temporizador del cerebro comienza al inicio de cada proyecto. El bloque de reinicio del temporizador se utiliza para reiniciarlo a 0 segundos.
En este ejemplo, el cerebro imprimirá la hora actual después de esperar 2 segundos antes de reiniciar su temporizador.
cuando empezó
imprimir (temporizador en segundos) ◀ y coloque el cursor en la siguiente fila
esperar (2) segundos
reiniciar el temporizador
imprimir (temporizador en segundos) ◀ y coloque el cursor en la siguiente fila
Valor del temporizador#
El bloque Valor del temporizador se utiliza para informar el valor del temporizador del robot en segundos.
(temporizador en segundos)
El temporizador comienza en 0 segundos cuando se inicia el programa e informa el valor del temporizador como un valor decimal.
En este ejemplo, el cerebro imprimirá la hora actual después de esperar 2 segundos antes de reiniciar su temporizador.
cuando empezó
imprimir (temporizador en segundos) ◀ y coloque el cursor en la siguiente fila
esperar (2) segundos
reiniciar el temporizador
imprimir (temporizador en segundos) ◀ y coloque el cursor en la siguiente fila
Detección del tren motriz#
¿La unidad está lista?#
El bloque ¿La unidad está lista? se utiliza para informar si el robot 123 no se está moviendo.
<¿La unidad está lista?>
El bloque ¿La unidad está lista? informa Verdadero cuando el robot 123 no se está moviendo.
El bloque ¿La unidad está lista? informa Falso cuando el robot 123 se está moviendo.
En este ejemplo, el bloque Forever se utiliza para verificar continuamente si se ha presionado el botón Sonido mientras el Robot 123 avanza.
cuando empezó
unidad [adelante v]
para siempre
[Check if the sound button is pressed.]
si <[soundIcon v] presionado?> entonces
[If the button is pressed, stop driving and stop checking.]
deja de conducir
romper
fin
fin
Dirección de la unidad#
El bloque Drive Heading se utiliza para informar el rumbo hacia el que se dirige el robot 123.
(rumbo de la unidad en grados)
En este ejemplo, el robot 123 imprimirá su encabezado actual en la consola de impresión.
cuando empezó
imprimir (rumbo de la unidad en grados) ◀ y coloque el cursor en la siguiente fila
Detección de botones#
¿Botón presionado?#
El bloque ¿Botón presionado? se utiliza para informar si se presionó el botón especificado.
<[ifbuttonleft v] presionado?>
El bloque ¿Botón presionado? informa Verdadero cuando se presiona el botón especificado.
El bloque ¿Botón presionado? informa Falso cuando no se presiona el botón especificado.
Elige qué botón utilizar:
Giro a la izquierda
Giro a la derecha
Adelante
Sonido

En este ejemplo, el robot 123 solo comenzará a moverse cuando se presione el botón Sonido.
cuando empezó
esperar hasta <[soundIcon v] presionado?>
unidad [adelante v]
Detección giroscópica#
¿Se detectó un accidente?#
El bloque ¿Accidente detectado? se utiliza para informar si el robot 123 ha entrado en contacto con una pared u otro objeto.
<¿Se detectó un accidente?>
El bloque ¿Accidente detectado? informa Verdadero cuando el robot 123 está en contacto con una pared u otro objeto.
El bloque ¿Accidente detectado? informa Falso cuando el Robot 123 no está en contacto con una pared u otro objeto.
En este ejemplo, el robot 123 avanza y espera hasta detectar un choque para detenerse.
cuando empezó
unidad [adelante v]
esperar hasta <¿Se detectó un accidente?>
deja de conducir
Aceleración de#
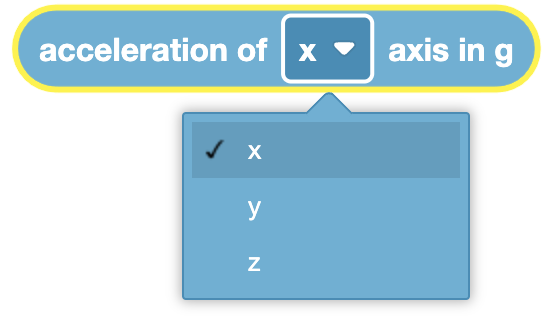
El bloque Aceleración de se utiliza para informar el valor de aceleración de uno de los ejes (x, y o z) del sensor giroscópico del robot 123.
(aceleración del eje [incógnita v] en g)
El bloque Aceleración de informa un rango de -4,0 a 4,0 Gs.
Elija qué eje utilizar:
x - El eje X informa la aceleración cuando el sensor giroscópico se mueve hacia adelante y hacia atrás.
y - El eje Y informa la aceleración cuando el sensor giroscópico se mueve de lado a lado.
z - El eje Z informa la aceleración cuando el sensor giroscópico se mueve hacia arriba y hacia abajo.
En este ejemplo, el robot 123 se moverá hacia adelante durante un segundo antes de imprimir su aceleración actual del eje X mientras se mueve.
cuando empezó
unidad [adelante v]
esperar (1) segundos
imprimir (aceleración del eje [incógnita v] en g) ◀ y coloque el cursor en la siguiente fila
Detección ocular#
Establecer la luz de los ojos#
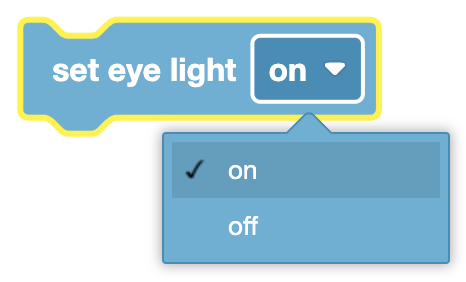
El bloque Establecer luz ocular se utiliza para configurar la luz del sensor ocular en encendido o apagado.
establecer luz de ojo [encendido v]
La potencia predeterminada del bloque Establecer luz de ojo es 100 % cuando está encendido y 0 % cuando está apagado.
Elija si desea activar o desactivar la luz del sensor ocular.
En este ejemplo, la luz del sensor ocular se encenderá y luego se apagará después de 2 segundos.
cuando empezó
establecer luz de ojo [encendido v]
esperar (2) segundos
establecer luz de ojo [apagado v]
Establecer la potencia de la luz de los ojos#
El bloque Establecer potencia de luz del ojo se utiliza para configurar la potencia de luz del sensor óptico
Establezca la potencia de la luz ocular al (50)%
El bloque Ajustar potencia de la luz ocular admite un rango de 0 % a 100 %. Esto cambiará el brillo de la luz en el sensor ocular. Si la luz está apagada, este bloque la encenderá.
En este ejemplo, la luz del sensor ocular se establece al 75 % antes de esperar a detectar un objeto para imprimir un mensaje.
cuando empezó
Establezca la potencia de la luz ocular al (75)%
esperar hasta <¿El ojo encontró un objeto?>
imprimir [Object has been detected.] ◀ y coloque el cursor en la siguiente fila
Sensor ocular de objetos encontrados#
El bloque Objeto encontrado por el sensor ocular se utiliza para informar si el sensor ocular detecta un objeto cerca de él.
<¿El ojo encontró un objeto?>
El bloque Objeto encontrado por el sensor ocular informa “Verdadero” cuando el sensor ocular detecta un objeto cerca de él.
El bloque Objeto encontrado por el sensor ocular informa “Falso” cuando un objeto no se encuentra dentro del alcance del sensor ocular.
En este ejemplo, la luz de encendido del sensor ocular se establece al 75 % antes de esperar a detectar un objeto para imprimir un mensaje.
cuando empezó
Establezca la potencia de la luz ocular al (75)%
esperar hasta <¿El ojo encontró un objeto?>
imprimir [Object has been detected.] ◀ y coloque el cursor en la siguiente fila
El sensor ocular detecta el color#
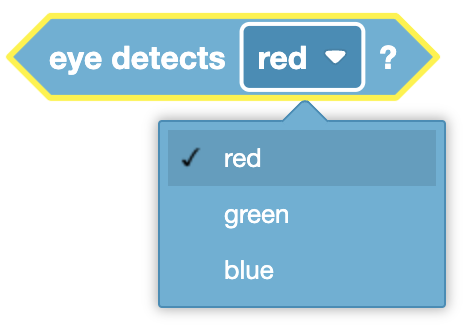
El bloque El sensor ocular detecta color se utiliza para informar si el sensor ocular detecta el color especificado.
<¿El ojo detecta [rojo v]?>
El bloque El sensor ocular detecta el color informa “Verdadero” cuando el sensor óptico detecta el color especificado.
El bloque El sensor ocular detecta color informa “Falso” cuando el sensor óptico no detecta el color especificado.
Elija el color que buscará el sensor ocular:
rojo
verde
azul
En este ejemplo, el sensor ocular esperará hasta detectar un color rojo antes de imprimir un mensaje.
cuando empezó
esperar hasta <¿El ojo detecta [rojo v]?>
imprimir [Red has been detected.] ◀ y coloque el cursor en la siguiente fila
Tono de ojos#
El bloque Tono de ojo se utiliza para informar el tono del color de un objeto.
(tono de ojos en grados)
El bloque Tono del ojo reporta un valor numérico que representa el tono de color de un objeto. Devuelve un número entre 0 y 359.
El valor puede considerarse como la ubicación del color en una rueda de colores en grados.
En este ejemplo, el sensor ocular imprimirá el tono visto actualmente en la pantalla del cerebro.
cuando empezó
imprimir (tono de ojos en grados) ◀ y coloque el cursor en la siguiente fila
¿El ojo detecta un objeto brillante?#
El bloque ¿El ojo detecta un objeto brillante? se utiliza para informar si el sensor ocular detecta un objeto cerca de él.
<¿ojo objeto brillante?>
El bloque ¿El ojo detecta un objeto brillante? informa Verdadero cuando el sensor ocular detecta un valor de brillo mayor al 70%.
El bloque ¿El ojo detecta un objeto brillante? informa Falso cuando el sensor ocular detecta un valor de brillo menor o igual al 70%.
En este ejemplo, el sensor ocular espera hasta detectar un objeto brillante para imprimir un mensaje.
cuando empezó
esperar hasta <¿ojo objeto brillante?>
imprimir [Bring object detected.] ◀ y coloque el cursor en la siguiente fila
Brillo de los ojos#
El bloque Brillo ocular se utiliza para informar la cantidad de luz detectada por el sensor ocular.
(brillo ocular en %)
El bloque Brillo del ojo informa un valor numérico del 0% al 100%.
Si se detecta una gran cantidad de luz, se informará un valor de brillo alto.
Una pequeña cantidad de luz detectada informará un valor de brillo bajo.
En este ejemplo, el sensor ocular imprimirá el valor de brillo actual en la pantalla del cerebro.
cuando empezó
imprimir (brillo ocular en %) ◀ y coloque el cursor en la siguiente fila