传感#
大脑感知#
重置计时器#
重置计时器块用于重置机器人的计时器。
重置计时器
Brain 的计时器在每个项目开始时启动。重置计时器积木用于将计时器重置回 0 秒。
在这个例子中,Brain 将在等待 2 秒后打印当前时间,然后再重置其计时器。
当开始
打印 (计时器秒数) ◀ 并设定光标为下一行
等待 (2) 秒
重置计时器
打印 (计时器秒数) ◀ 并设定光标为下一行
计时器值#
计时器值块用于报告机器人计时器的值(以秒为单位)。
(计时器秒数)
计时器在程序启动时从 0 秒开始,并以十进制值报告计时器的值。
在这个例子中,Brain 将在等待 2 秒后打印当前时间,然后再重置其计时器。
当开始
打印 (计时器秒数) ◀ 并设定光标为下一行
等待 (2) 秒
重置计时器
打印 (计时器秒数) ◀ 并设定光标为下一行
动力传动系统传感#
驾驶完成了吗?#
**驱动完成?**块用于报告 123 机器人是否没有移动。
<驱动已结束?>
当 123 机器人没有移动时,**驱动完成?**块报告“True”。
当 123 机器人移动时,驱动完成? 块报告“False”。
在这个例子中,永远块用于在 123 机器人向前行驶时不断检查声音按钮是否被按下。
当开始
驱动 [向前 v]
永久循环
[Check if the sound button is pressed.]
如果 <[soundIcon v] 按下了?> 那么
[If the button is pressed, stop driving and stop checking.]
驱动停止
退出循环
结束
结束
行驶方向#
Drive Heading 块用于报告 123 机器人所面向的航向。
(底盘归位角度值)
在此示例中,123 机器人将把其当前标题打印到打印控制台。
当开始
打印 (底盘归位角度值) ◀ 并设定光标为下一行
按钮感应#
按下按钮了吗?#
按钮按下了吗? 块用于报告是否按下了指定的按钮。
<[ifbuttonleft v] 按下了?>
当按下指定按钮时,**按钮按下了吗?**块会报告“True”。
当未按下指定按钮时,**按钮是否按下?**块将报告“False”。
选择要使用的按钮:
左转
右转
向前
声音

在这个例子中,只有按下声音按钮时,123 机器人才会开始移动。
当开始
等到 <[soundIcon v] 按下了?>
驱动 [向前 v]
陀螺仪感应#
检测到碰撞?#
**检测到碰撞?**块用于报告 123 机器人是否与墙壁或其他物体接触。
<检测到碰撞?>
当 123 机器人与墙壁或其他物体接触时,**检测到碰撞?**块会报告“True”。
当 123 机器人未与墙壁或其他物体接触时,**检测到碰撞?**块会报告“False”。
在这个例子中,123 机器人向前行驶并等待,直到检测到碰撞才停止移动。
当开始
驱动 [向前 v]
等到 <检测到碰撞?>
驱动停止
加速#
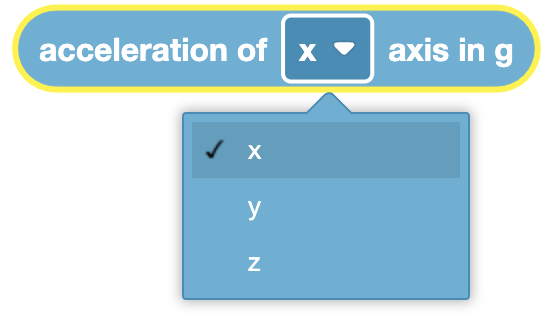
加速度块用于报告 123 机器人陀螺仪传感器的某个轴(x、y 或 z)的加速度值。
([X v] 轴加速度值\(g\))
加速度块报告的范围是从 -4.0 到 4.0 Gs。
选择要使用的轴:
x - 当陀螺仪传感器从向前移动到向后时,X 轴报告加速度。
y - 当陀螺仪传感器左右移动时,Y 轴报告加速度。
z - 当陀螺仪传感器从上向下移动时,Z 轴报告加速度。
在这个例子中,123机器人将向前移动一秒钟,然后打印其当前移动时的X轴加速度。
当开始
驱动 [向前 v]
等待 (1) 秒
打印 ([X v] 轴加速度值\(g\)) ◀ 并设定光标为下一行
眼部感应#
设置眼睛光#
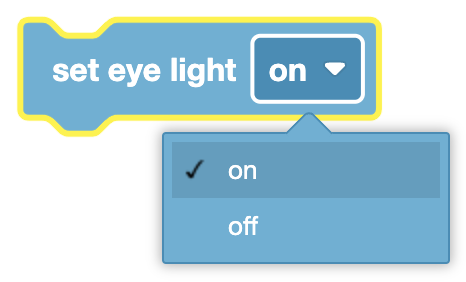
设置眼光块用于将眼传感器上的灯光设置为开或关。
设定辨色仪灯 [on v]
设置眼光块的默认功率在打开时为 100%,在关闭时为 0%。
选择是否将眼部传感器的灯设置为开或关。
在这个例子中,眼睛传感器的灯将会打开,然后在 2 秒后关闭。
当开始
设定辨色仪灯 [on v]
等待 (2) 秒
设定辨色仪灯 [灭 v]
设置眼部灯光强度#
设置眼部光功率 模块用于设置光学传感器的光功率
设定辨色仪灯功率为 (50)%
设置眼部照明灯功率 模块接受 0% 到 100% 之间的数值。这将改变眼部传感器上的照明灯亮度。如果照明灯关闭,该模块将打开照明灯。
在此示例中,眼睛传感器的光线设置为 75%,然后等待检测到物体以打印消息。
当开始
设定辨色仪灯功率为 (75)%
等到 <辨色仪发现一个对象?>
打印 [Object has been detected.] ◀ 并设定光标为下一行
眼睛传感器发现物体#
眼睛传感器发现物体块用于报告眼睛传感器是否检测到靠近它的物体。
<辨色仪发现一个对象?>
当眼睛传感器检测到靠近它的物体时,眼睛传感器发现物体块会报告“True”。
当物体不在眼睛传感器的范围内时,眼睛传感器发现物体块会报告“False”。
在此示例中,眼睛传感器的电源灯设置为 75%,然后等待检测到物体以打印消息。
当开始
设定辨色仪灯功率为 (75)%
等到 <辨色仪发现一个对象?>
打印 [Object has been detected.] ◀ 并设定光标为下一行
眼睛传感器检测颜色#
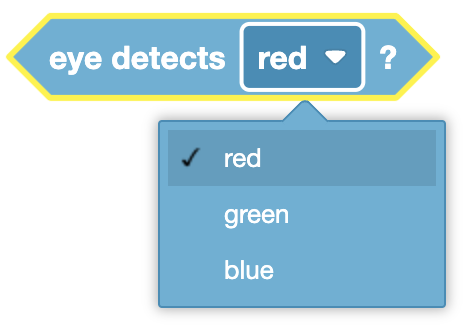
眼睛传感器检测颜色块用于报告眼睛传感器是否检测到指定的颜色。
<辨色仪测得 [红色 v]?>
当光学传感器检测到指定颜色时,眼睛传感器检测颜色块报告“真”。
当光学传感器未检测到指定颜色时,眼睛传感器检测颜色块会报告“False”。
选择眼睛传感器将检查的颜色:
红色的
绿色的
蓝色的
在这个例子中,眼睛传感器将等到检测到红色后才打印消息。
当开始
等到 <辨色仪测得 [红色 v]?>
打印 [Red has been detected.] ◀ 并设定光标为下一行
眼睛色调#
眼睛色调块用于报告物体颜色的色调。
(辨色仪色度值)
眼睛色调 模块报告一个数值,该数值表示物体颜色的色调。它返回一个介于 0 到 359 之间的数字。
该值可以被认为是颜色在色轮上的位置(以度为单位)。
在这个例子中,眼睛传感器会将当前看到的色调打印到大脑的屏幕上。
当开始
打印 (辨色仪色度值) ◀ 并设定光标为下一行
眼睛检测到明亮的物体吗?#
**眼睛检测到明亮物体?**块用于报告眼睛传感器是否检测到靠近它的物体。
<看到明亮对象?>
当眼睛传感器检测到亮度值大于 70% 时,眼睛检测到明亮物体? 块会报告“真”。
当眼睛传感器检测到的亮度值小于或等于 70% 时,眼睛检测到明亮物体? 块会报告“False”。
在此示例中,眼睛传感器等待直到检测到明亮的物体才打印消息。
当开始
等到 <看到明亮对象?>
打印 [Bring object detected.] ◀ 并设定光标为下一行
眼睛亮度#
眼睛亮度块用于报告眼睛传感器检测到的光量。
(辨色仪亮度百分比)
眼睛亮度块报告从 0% 到 100% 的数值。
检测到的大量光将报告高亮度值。
检测到少量光时将报告较低的亮度值。
在这个例子中,眼睛传感器将把当前亮度值打印到大脑的屏幕上。
当开始
打印 (辨色仪亮度百分比) ◀ 并设定光标为下一行