Wall Maze+#
The Wall Maze+ Playground occupies a square grid measuring 5000 millimeters by 5000 millimeters.
The VR MazeBot’s starting position is at the coordinate (-2100, -2100).
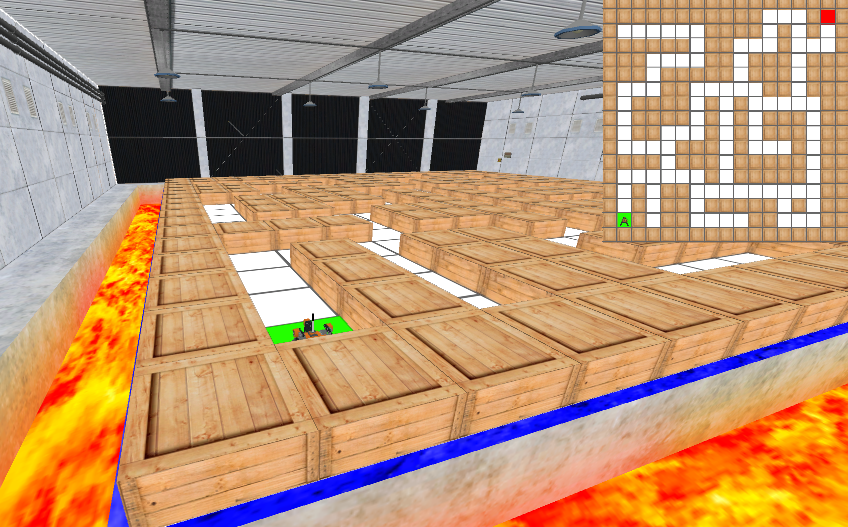
Each square within the Wall Maze+ Playground grid is spaced 300 millimeters apart.
VR Robot Attributes#
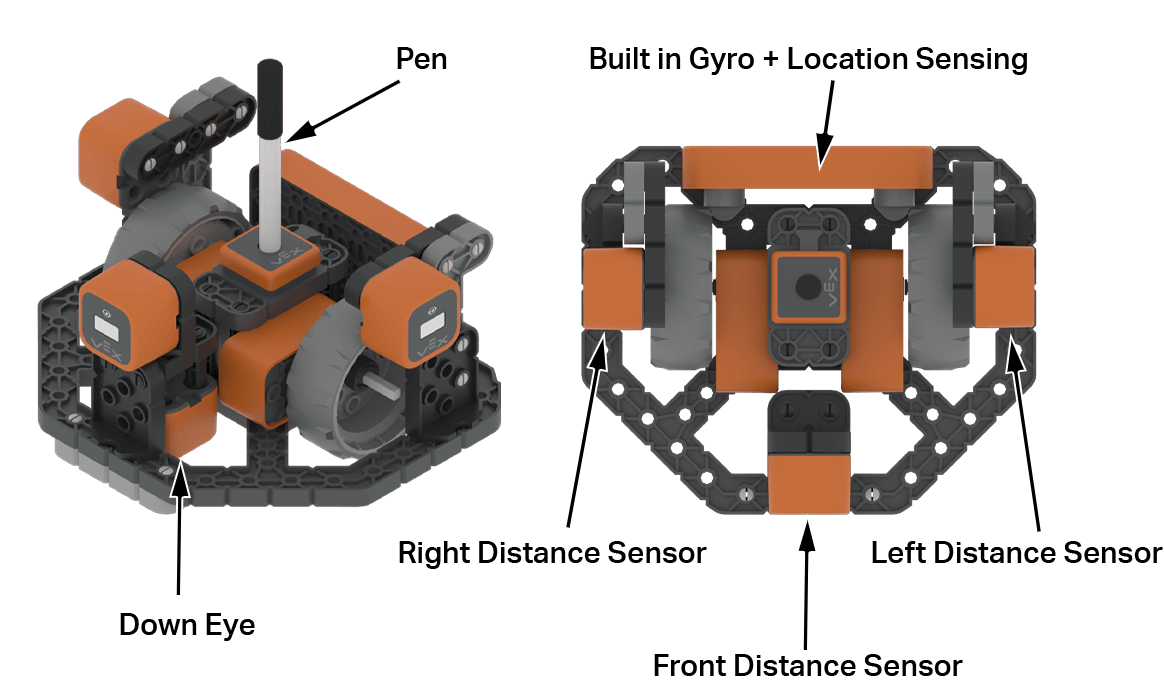
The Wall Maze+ Playground uses the VR MazeBot configuration.
The VR MazeBot measure approximately 95 millimeters long and 117.5 millimeters wide.
Compared to the standard VR Robot, the VR MazeBot’s default velocity is twice as high. This additional speed is there to help the robot navigate mazes faster.
Configuration |
Description |
API Documentation |
Python Command Name |
|---|---|---|---|
Drivetrain |
The Wall Maze+ Robot has access to a standard 2x2 Drivetrain with a built-in Gyro Sensor to track the VR Robot’s heading and angle of rotation. |
|
|
VR Pen |
The Robot has access to the standard VR Pen tool. |
|
|
Eye Sensor |
The Robot only has access to the Down Eye Sensor. |
|
|
Distance Sensor |
The Robot has access the Front, Left, and Right Distance Sensors. |
|
|
Location Sensor |
The Robot has access to a Location Sensor that can report its current position. |
|