Relevo rápido IQ (Swish)#
Swish es el robot héroe VEX IQ utilizado en el VIQRC 24-25 Rapid Relay Playground.
Descripción general del robot#
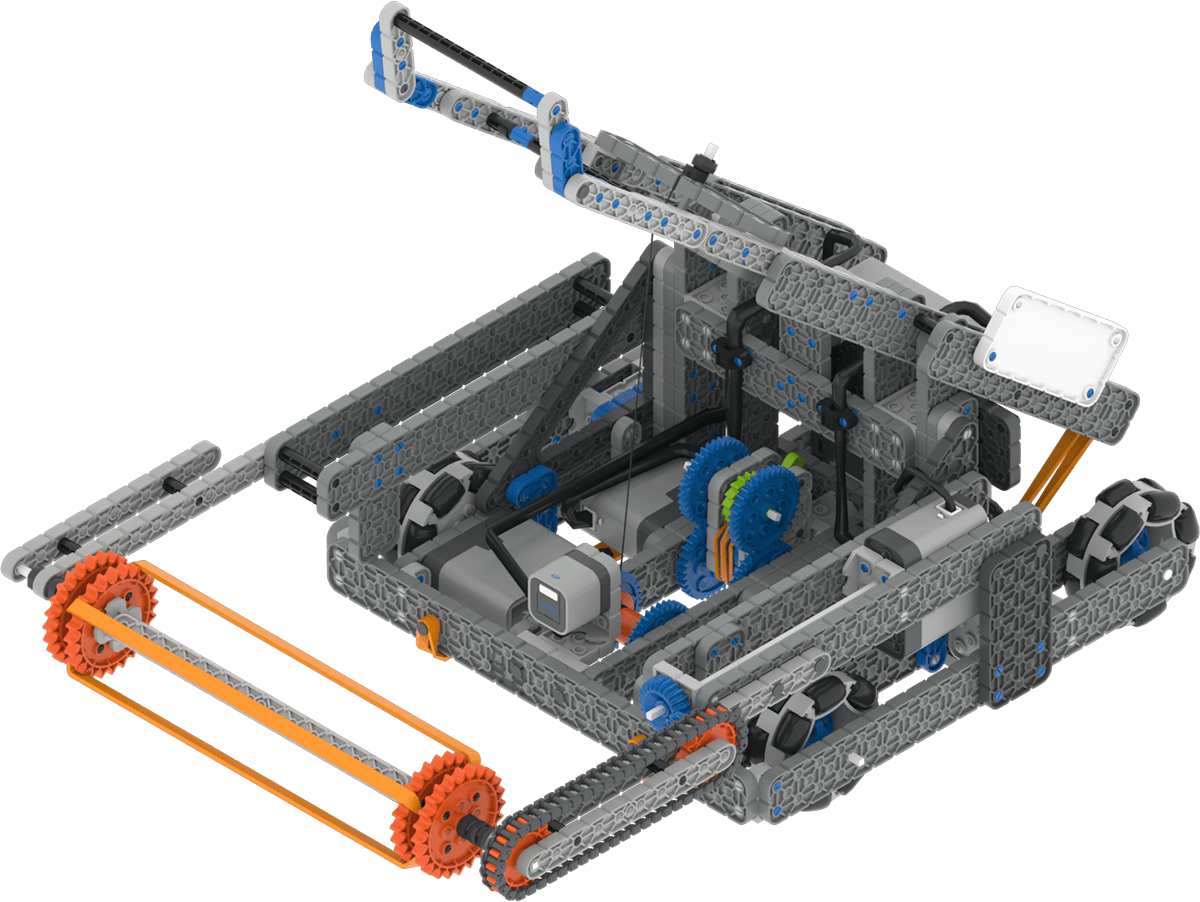
Swish admite controles y sensores de realidad virtual estándar, como el sensor inercial y el temporizador cerebral, con características adicionales específicas de Swish que se tratan en Bloques específicos del robot y Python específico del robot.
Grupos de motores#
Configuración y nombre del comando Python |
Descripción |
|---|---|
|
El motor de entrada puede girar hacia adelante y hacia atrás para recoger las bolas y colocarlas en la catapulta. El motor de entrada debe estar girando antes de entrar en contacto con una bola para poder recogerla. |
|
El grupo motor del brazo de la catapulta se utiliza para lanzar las pelotas que el robot ha recogido. Para recoger una pelota, el brazo de la catapulta debe descender al menos 1350 grados. Cuando el brazo de la catapulta se eleva o se suelta, alcanza automáticamente su altura máxima para lanzar las pelotas. |
Componentes y características#
Componente o característica |
Usar |
Documentación de la API |
|---|---|---|
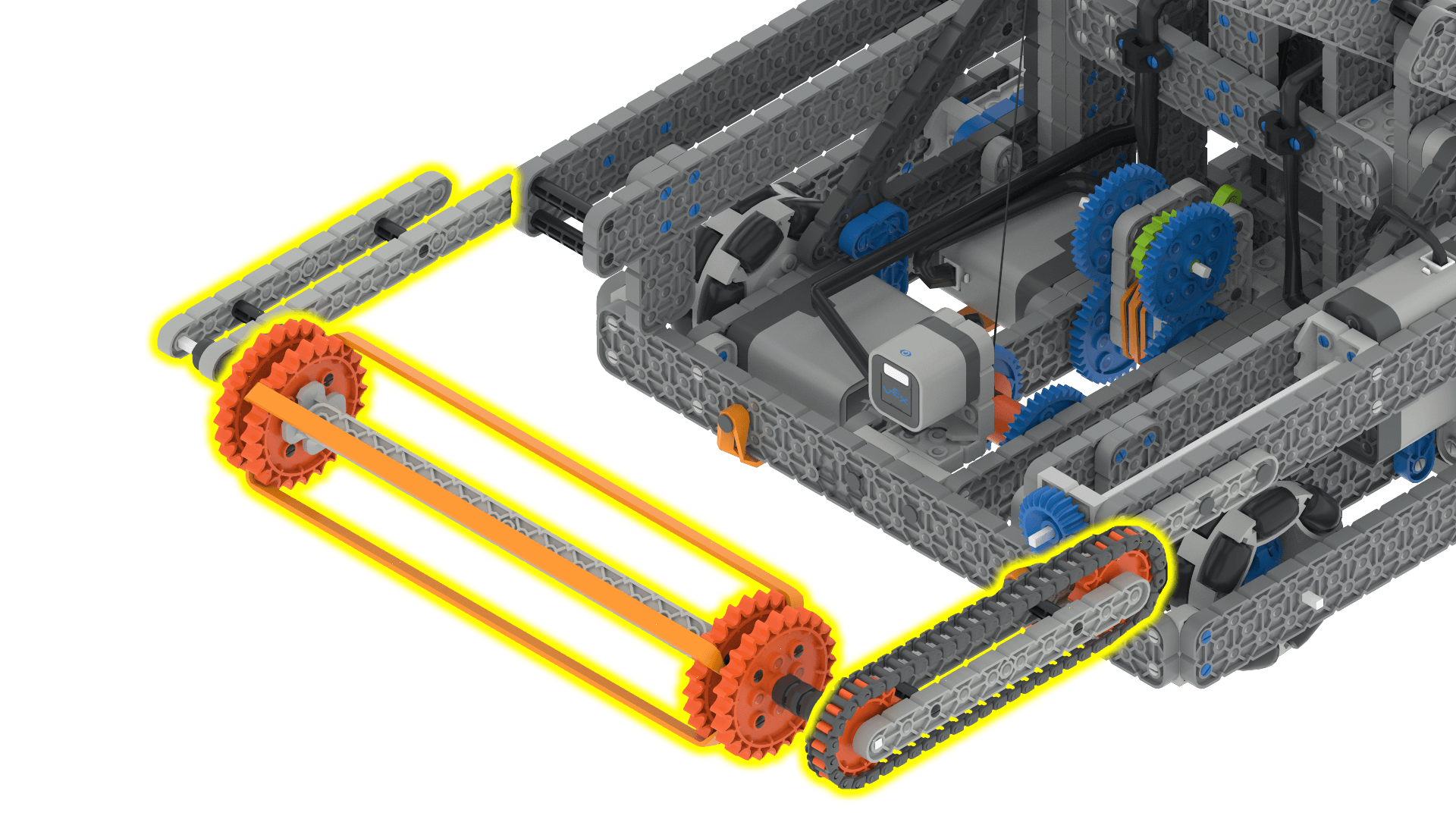
Tren de transmisión |
Mueve y gira el robot. |
|
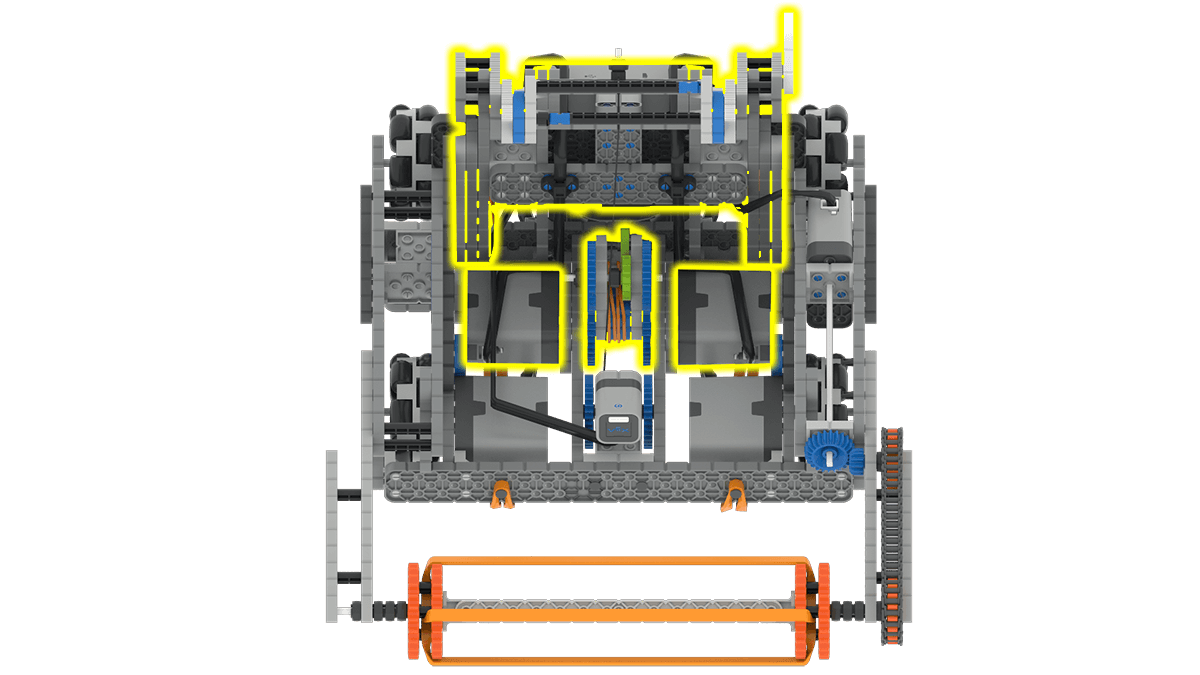
Motor de admisión |
Hace girar las dos ruedas delanteras del robot. Esto permite recoger las pelotas del suelo. |
|
Grupo Motor Catapulta |
Lanza las pelotas que el robot ha recogido. |
|
Sensor de distancia trasero |
Detecta la distancia a la que se encuentra la parte trasera del robot del muro de meta. |
|
Sensor óptico de admisión |
Detecta si hay una bola en la entrada. |
|
Temporizador cerebral |
Registra el tiempo transcurrido desde que comenzó el proyecto. |
parques infantiles#
Patio de juegos |
Descripción |
|---|---|
Recoge y lanza pelotas en el campo de habilidades virtuales VIQRC 24-25. |