运动#
介绍#
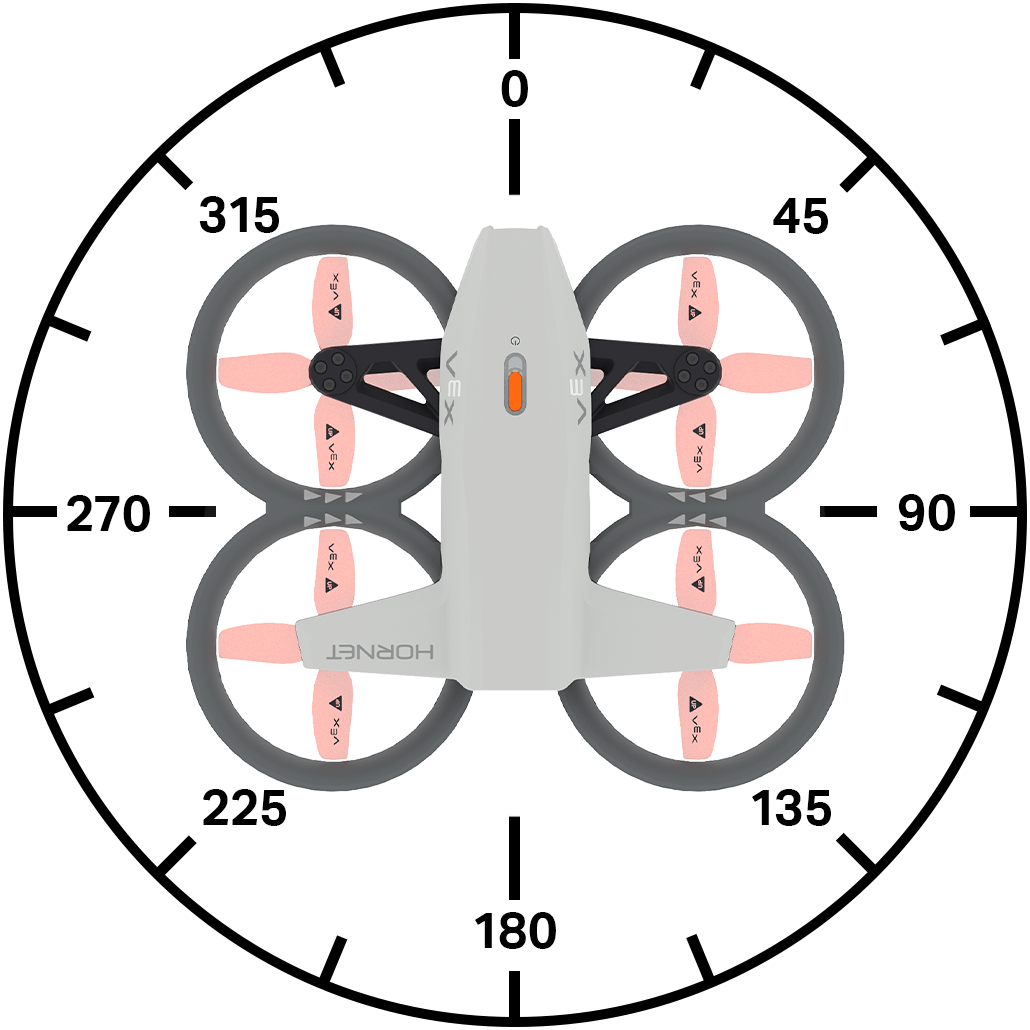
VEX AIR 无人机配备四个螺旋桨,使其能够向任意方向移动并独立旋转。运动控制功能提供了移动、转向、速度调节和位置跟踪等方法。
以下是所有可用方法的列表:
行动
take_off– Lifts the drone to a specified height.land– Lands the drone.hover- Keeps the drone at its position.climb– Moves the drone in a specified vertical direction.climb_for– Moves the drone in a specified vertical direction for a specific distance.climb_to– Moves the drone to a specified altitude.move_at– Moves the drone at a specified heading and velocity.move_for– Moves the drone at a specified heading for a specified distance.move_to– Moves the drone to a specified position while maintaining the same heading.turn– Turns the drone left or right.turn_for– Turns the drone a set number of degrees.turn_to– Turns the drone to face a specific heading.move_with_vectors– Moves the drone using vector-based x, y, z, and rotation values.
修改器
set_steering_mode– Sets the POV for steering the drone.set_movement_mode– Sets the movement style of the drone.set_climb_velocity– Sets the default climbing velocity.set_move_velocity– Sets the default movement velocity.set_turn_velocity- Sets the default turning velocity.set_max_z_height- Sets a limit to how high the drone will fly.set_xyz_position– Sets the drone’s current position.
吸气剂
get_max_z_height– Returns the maximum height that the drone can reach.get_flight_state– Returns the current state of the drone.get_x_position– Returns the drone’s x-coordinate.get_y_position– Returns the drone’s y-coordinate.get_z_position– Returns the drone’s z-coordinate.get_safe_mode– Returns the drone’s propellor lock state.is_climb_active– Returns whether the drone is currently climbing.is_move_active– Returns whether the drone is currently moving.is_turn_active– Returns whether the drone is currently turning.is_hovering- Returns whether the drone is currently hovering.is_taking_off– Returns whether the drone is currently taking off.is_landing– Returns whether the drone is currently landing.is_landed- Returns whether the drone is currently landed.
行动#
take_off#
take_off starts the propellers and lifts the drone into the air. This method must be used before other movements can be made.
用法:
drone.take_off(climb_to, units, wait)
参数 |
描述 |
|---|---|
|
无人机将飞到的z轴位置(高度)。 |
|
The unit to use:
|
|
Optional. |
# Fly for 1 second
drone.take_off(climb_to=500)
wait(1, SECONDS)
drone.land()
land#
land lowers the drone to the ground. The propellers will continue to run until the project is stopped.
用法:
drone.land(wait)
参数 |
描述 |
|---|---|
|
Optional. |
# Land after 1 second
drone.take_off(climb_to=500)
wait(1, SECONDS)
drone.land()
hover#
hover stops the drone from moving in any direction and holds its current position in the air.
Usage:
drone.hover()
参数 |
描述 |
|---|---|
该方法没有参数。 |
# Hold current position for 3 seconds after moving forward
drone.take_off(climb_to=500)
drone.move_at(direction=0, velocity=50)
wait(1, SECONDS)
drone.hover()
wait(3, SECONDS)
drone.land()
climb#
climb moves the drone in a specified vertical direction.
Usage:
drone.climb(direction, velocity)
参数 |
描述 |
|---|---|
|
The direction in which the drone will fly: |
|
无人机爬升的速度百分比。 |
# Climb upwards for 2 seconds
drone.take_off(climb_to=500)
wait(2, SECONDS)
drone.climb(direction=UP)
wait(2, SECONDS)
drone.land()
climb_for#
climb_for moves the drone in a specified vertical direction for a specific distance.
用法:
drone.climb_for(direction, distance, units, velocity, wait)
参数 |
描述 |
|---|---|
|
The direction in which the drone will fly: |
|
无人机的飞行距离。 |
|
Optional. The unit that represents the distance:
|
|
可选。无人机爬升的速度(以百分比表示)。如果未指定速度,则默认速度为 50%。 |
|
Optional. |
# Lower drone before landing
drone.take_off(climb_to=700)
wait(2, SECONDS)
drone.climb_for(direction=DOWN, distance=300)
wait(2, SECONDS)
drone.land()
climb_to#
climb_to moves the drone to a specific z position.
用法:
drone.climb_to(z, units, velocity, wait)
参数 |
描述 |
|---|---|
|
无人机将爬升至的 z 位置(整数或小数)。 |
|
Optional. The unit that represents the distance:
|
|
可选。无人机爬升的速度百分比。 |
|
Optional. |
# Reach 500 mm after takeoff
drone.take_off(climb_to=300)
wait(1, SECONDS)
drone.climb_to(z=500)
wait(1, SECONDS)
drone.land()
move_at#
move_at moves the drone at a specified angle and velocity.
用法:
drone.move_at(angle, velocity)
参数 |
描述 |
|---|---|
|
无人机移动的角度,以整数或小数表示,范围从 0 到 359 度。 |
|
无人机移动的速度(以百分比表示)。 |
# Move left for 2 seconds
drone.take_off(climb_to=500)
drone.move_at(angle=270)
wait(2, SECONDS)
drone.land()
move_for#
move_for moves the drone in a specific direction for a specific distance using the current set_move_velocity.
用法:
drone.move_for(angle, distance, units, velocity, wait)
参数 |
描述 |
|---|---|
|
无人机移动的角度,以整数或十进制数表示 (float),范围从 0 到 359 度。 |
|
无人机移动的距离,以整数或小数表示。 |
|
Optional. The unit that represents the distance:
|
|
可选。无人机移动的速度(百分比)。 |
|
Optional. |
# Move forward for 200 mm
drone.take_off(climb_to=500)
wait(1, SECONDS)
drone.move_for(direction=0, distance=200, velocity=50, units=MM)
wait(1, SECONDS)
drone.land()
move_to#
move_to moves the drone to a specified position in the air while maintaining the same heading.
用法:
drone.move_to(x, y, z, units, move_velocity, climb_velocity, wait)
参数 |
描述 |
|---|---|
|
无人机将移动到的 x 坐标。 |
|
无人机将移动到的 y 坐标。 |
|
无人机将移动到的 z 坐标。 |
|
Optional. The unit that represents the distance:
|
|
可选。无人机移动的速度(百分比)。 |
|
可选。无人机爬升的速度百分比。 |
|
Optional. |
# Move diagonally to (300, 300, 800)
drone.take_off(climb_to=300)
wait(2, SECONDS)
drone.move_to(x=300, y=300, z=800)
wait(2, SECONDS)
drone.land()
turn#
turn turns the drone in a specific direction using the current set_turn_velocity.
用法:
drone.turn(direction, velocity)
参数 |
描述 |
|---|---|
|
The direction the drone will turn: |
|
可选。无人机转弯的速度(百分比)。 |
# Turn to the right for 2 seconds
drone.take_off(climb_to=500)
wait(1, SECONDS)
drone.turn(RIGHT, 50)
wait(2, SECONDS)
drone.land()
turn_for#
turn_for turns the drone in a specified direction for a set distance relative to its current facing direction using the current set_turn_velocity.
用法:
drone.turn_for(direction, angle, velocity, wait)
参数 |
描述 |
|---|---|
|
The direction the drone will turn: |
|
无人机转弯的角度,以整数或十进制数表示 (float),范围从 0 到 359 度。 |
|
可选。无人机转弯的速度(百分比)。 |
|
Optional. |
# Turn around, then land
drone.take_off(climb_to=500)
wait(1, SECONDS)
drone.turn_for(RIGHT, 180)
wait(1, SECONDS)
drone.land()
turn_to#
turn_to turns the drone to face a specific heading using the current set_turn_velocity.
用法:
drone.turn_to(heading, velocity, wait)
参数 |
描述 |
|---|---|
|
无人机将转向的方向,范围为 0 到 360 度。 |
|
可选。无人机转弯的速度(百分比)。 |
|
Optional. |
# Turn to face each of the cardinal headings
drone.take_off(climb_to=500)
drone.turn_to(heading=90, velocity=50)
wait(3, SECONDS)
drone.turn_to(heading=180, velocity=50)
wait(3, SECONDS)
drone.turn_to(heading=270, velocity=50)
wait(3, SECONDS)
drone.turn_to(heading=0, velocity=50)
wait(3, SECONDS)
drone.land()
move_with_vectors#
move_with_vectors moves the drone using vector-based motion, combining movement along the x-axis (horizontal) and y-axis (vertical) while also rotating the drone.
Note: This method sets movement and turn velocity values directly, so it does not use set_move_velocity or set_turn_velocity.
用法:
drone.move_with_vectors(forward, rightward, upward, rotation)
参数 |
描述 |
|---|---|
|
无人机沿 Y 轴的速度(前后移动)。接受 -100 到 100 之间的百分比值,负值表示向后移动,正值表示向前移动。 |
|
无人机沿 X 轴(左右移动)的速度。接受 -100 到 100 之间的百分比值,负值向左移动,正值向右移动。 |
|
无人机沿 Z 轴(上下运动)的速度。接受 -100 到 100 之间的百分比值,负值表示向下移动,正值表示向上移动。 |
|
无人机的旋转速度。接受 -100 到 100 之间的百分比值,其中负值表示逆时针旋转,正值表示顺时针旋转。 |
# Move with controller
drone.take_off(climb_to=500)
while True:
drone.move_with_vectors(
forward=controller.axis4.position(),
rightward=controller.axis3.position(),
upward=controller.axis1.position(),
rotation=controller.axis2.position()
)
wait(5, MSEC)
修改器#
set_steering_mode#
set_steering_mode sets the viewpoint that is used when steering the drone.
用法:
drone.set_steering_mode(style)
参数 |
描述 |
|---|---|
|
Sets the POV that is used to steer the drone. |
# Steer based on the drone's starting orientation
# until button 7 is pressed
drone.take_off(climb_to=500)
drone.set_steering_mode(HEADLESS)
while not controller.button7.pressing():
drone.move_with_vectors(
forward=controller.axis4.position(),
rightward=controller.axis3.position(),
upward=controller.axis1.position(),
rotation=controller.axis2.position()
)
wait(5, MSEC)
drone.land()
set_movement_mode#
set_movement_mode sets the drone’s movement style.
这种运动方式用于使用控制器驾驶无人机时。
用法:
drone.set_movement_mode(style)
参数 |
描述 |
|---|---|
|
Sets the speed that is used to steer the drone.
|
# Control the drone with the balanced movement style
drone.take_off(climb_to=500)
drone.set_movement_mode(BALANCED)
while not controller.button5.pressing():
drone.move_with_vectors(
forward=controller.axis4.position(),
rightward=controller.axis3.position(),
upward=controller.axis1.position(),
rotation=controller.axis2.position()
)
wait(5, MSEC)
drone.land()
set_climb_velocity#
set_climb_velocity sets the default climbing velocity as a percentage. This will affect any following methods related to climbing. The default climb velocity is 50%.
用法:
drone.set_climb_velocity(velocity)
参数 |
描述 |
|---|---|
|
无人机爬升的速度百分比。 |
# Raise the drone quickly before landing
drone.take_off(climb_to=300)
wait(1, SECONDS)
drone.set_climb_velocity(100)
drone.climb_for(direction=UP, distance=500)
wait(1, SECONDS)
drone.land()
set_move_velocity#
set_move_velocity sets the default movement velocity as a percentage. This will affect any following methods related to moving. The default move velocity is 50%.
用法:
drone.set_move_velocity(velocity)
参数 |
描述 |
|---|---|
|
无人机移动的速度(以百分比表示)。 |
# Move forward quickly, then reverse slowly
drone.take_off(climb_to=500)
drone.set_move_velocity(100)
drone.move_for(direction=0, distance=500)
wait(3, SECONDS)
drone.set_move_velocity(20)
drone.move_for(direction=180, distance=500)
wait(5, SECONDS)
drone.land()
set_turn_velocity#
set_turn_velocity sets the default turning velocity as a percentage. This will affect any following methods related to turning. The default turn velocity is 50%.
用法:
drone.set_turn_velocity(velocity)
参数 |
描述 |
|---|---|
|
无人机转弯的速度(以百分比表示)。 |
# Turn clockwise quickly, then counterclockwise slowly
drone.take_off(climb_to=500)
drone.set_turn_velocity(100)
drone.turn_for(RIGHT, 360)
wait(3, SECONDS)
drone.set_turn_velocity(20)
drone.turn_for(LEFT, 360)
wait(5, SECONDS)
drone.land()
set_max_z_height#
set_max_z_height sets a limit to how high the drone will fly.
用法:
drone.set_max_z_height(z_height, units)
参数 |
描述 |
|---|---|
|
无人机不会飞过的最大 z 轴值(整数或小数),范围为 1000 至 5000 毫米或 40 至 196 英寸。 |
|
Optional. The distance units are:
|
# Fly with controller under 1000 mm
drone.set_max_z_height(1000, MM)
drone.take_off(climb_to=500)
while not controller.button7.pressing():
drone.move_with_vectors(
forward=controller.axis4.position(),
rightward=controller.axis3.position(),
upward=controller.axis1.position(),
rotation=controller.axis2.position()
)
drone.land()
set_xyz_position#
set_xyz_position sets the drone’s current x, y, or z coordinate to a specified value.
用法:
drone.set_xyz_position(x, y, z, units)
Note: All parameters are optional, but at least one (x, y, or z) must be specified.
参数 |
描述 |
|---|---|
|
Optional. The x coordinate to set for the drone in |
|
Optional. The y coordinate to set for the drone in |
|
Optional. The z coordinate to set for the drone in |
|
Optional. The unit that represents the distance:
|
# Set a new z position, then fly to z position -300
drone.take_off(climb_to=800)
drone.set_xyz_position(z=0)
wait(1, SECONDS)
drone.climb(DOWN, 50)
while not drone.get_z_position() < -300:
wait(5, MSEC)
drone.hover()
wait(1, SECONDS)
drone.land()
吸气剂#
get_max_z_height#
get_max_z_height returns the maximum height that the drone can reach as an integer.
用法:
drone.get_max_z_height(units)
参数 |
描述 |
|---|---|
|
Optional. The unit of measurement:
|
# Display the new z height limit
controller.screen.print(drone.get_max_z_height(MM))
controller.screen.next_row()
drone.take_off(climb_to=500)
drone.set_max_z_height(1000)
controller.screen.print(drone.get_max_z_height(MM))
wait(1, SECONDS)
drone.land()
get_flight_state#
get_flight_state returns the drone’s current flying state as a DroneFlightStateType:
MOTOR_OFF- No other flight state is true.CALIBRATION- The drone is calibrating its sensors.MOTOR_START- The drone is starting its motors.FLIGHT_READY- The drone is ready to fly.FLIGHT- The drone is in flight.
Usage:
drone.get_flight_state()
参数 |
描述 |
|---|---|
该方法没有参数。 |
# Report the flight status as the drone takes off
controller.screen.print("Preparing for flight!")
controller.screen.next_row()
drone.take_off(climb_to=800, wait=False)
while not drone.get_flight_state() == MOTOR_START:
wait(5, MSEC)
controller.screen.print("Motors starting...")
controller.screen.next_row()
while not drone.get_flight_state() == FLIGHT:
wait(5, MSEC)
controller.screen.print("Take off!")
get_x_position#
get_x_position returns the drone’s x coordinate as a decimal (float).
Usage:
drone.get_x_position(units)
参数 |
描述 |
|---|---|
|
Optional. The unit that represents the position:
|
# Move to (200, 0, 500)
drone.take_off(climb_to=500)
wait(1, SECONDS)
drone.move_at(direction=90, velocity=50)
while not drone.get_x_position() > 200:
wait(5, MSEC)
drone.hover()
wait(1, SECONDS)
drone.land()
get_y_position#
get_y_position returns the drone’s y coordinate as a decimal (float).
用法:
drone.get_y_position(units)
参数 |
描述 |
|---|---|
|
Optional. The unit that represents the position:
|
# Move to (0, 200, 500)
drone.take_off(climb_to=500)
wait(1, SECONDS)
drone.move_at(direction=0, velocity=50)
while not drone.get_y_position() > 200:
wait(5, MSEC)
drone.hover()
wait(1, SECONDS)
drone.land()
get_z_position#
get_y_position returns the drone’s z coordinate as a decimal (float).
用法:
drone.get_z_position(units)
参数 |
描述 |
|---|---|
|
Optional. The unit that represents the position:
|
# Move to (0, 0, 800)
drone.take_off(climb_to=500)
wait(1, SECONDS)
drone.climb(UP, 50)
while not drone.get_z_position() > 800:
wait(5, MSEC)
drone.hover()
wait(1, SECONDS)
drone.land()
get_safe_mode#
get_safe_mode returns a Boolean indicating whether the Propeller Lock is enabled on the drone.
True– Propeller Lock is enabled.False– Propeller Lock is not enabled.
用法:
drone.get_safe_mode()
参数 |
描述 |
|---|---|
该方法没有参数。 |
# Change the sound by enabling the Propeller Lock
while True:
if drone.get_safe_mode():
controller.sound.play(FAULT)
while controller.sound.is_active():
wait(50, MSEC)
else:
controller.sound.play(SUCCESS)
while controller.sound.is_active():
wait(50, MSEC)
wait(5, MSEC)
is_climb_active#
is_climb_active returns a Boolean indicating whether the drone is climbing.
True– The drone is currently climbing.False– The drone is not climbing.
用法:
drone.is_climb_active()
参数 |
描述 |
|---|---|
该方法没有参数。 |
# After the drone starts to climb, play a sound and land
drone.take_off(climb_to=500)
drone.climb(UP, 50)
wait(3, SECONDS)
if drone.is_climb_active():
controller.sound.play(SUCCESS)
drone.land()
is_move_active#
is_move_active returns a Boolean indicating whether the drone is currently using a move method.
True– The drone is currently using a move method.False– The drone is not currently using a move method.
用法:
drone.is_move_active()
参数 |
描述 |
|---|---|
该方法没有参数。 |
# After the drone starts to move, play a sound and land
drone.take_off(climb_to=500)
drone.move_at(direction=0, velocity=50)
wait(2, SECONDS)
if drone.is_move_active():
controller.sound.play(SUCCESS)
drone.land()
is_turn_active#
is_turn_active returns a Boolean indicating whether the drone is turning.
True– The drone is currently turning.False– The drone is not turning.
用法:
drone.is_turn_active()
参数 |
描述 |
|---|---|
该方法没有参数。 |
# After the drone starts to turn, play a sound and land
drone.take_off(climb_to=500)
drone.turn(RIGHT)
wait(2, SECONDS)
if drone.is_turn_active():
controller.sound.play(LOOPING)
while controller.sound.is_active():
wait(50, MSEC)
drone.land()
is_hovering#
is_hovering returns a Boolean indicating whether the drone is maintaining its position (hovering).
True– The drone is currently maintaining its position (hovering).False– The drone is currently changing its position.
用法:
drone.is_hovering()
参数 |
描述 |
|---|---|
该方法没有参数。 |
# Play a sound after the drone has finished taking off
drone.take_off(climb_to=700)
while not drone.is_hovering():
wait(5, MSEC)
controller.sound.play(PAUSE)
wait(2, SECONDS)
drone.land()
is_taking_off#
is_taking_off returns a Boolean indicating whether the drone is in the process of taking off.
True– The drone is currently in the process of taking off.False– The drone is not in the process of taking off.
用法:
drone.is_taking_off()
参数 |
描述 |
|---|---|
该方法没有参数。 |
# Play sounds while the drone is taking off
drone.take_off(700, wait=False)
wait(1, SECONDS)
while drone.is_taking_off():
controller.sound.play(LOOPING)
wait(5, MSEC)
is_landing#
is_landing returns a Boolean indicating whether the drone is in the process of landing.
True– The drone is currently in the process of landing.False– The drone is not in the process of landing.
用法:
drone.is_landing()
参数 |
描述 |
|---|---|
该方法没有参数。 |
# Play sounds while the drone is landing
drone.take_off(climb_to=500)
wait(1, SECONDS)
drone.land(wait=False)
wait(1, SECONDS)
while drone.is_landing():
controller.sound.play(LOOPING)
wait(5, MSEC)
is_landed#
is_landed returns a Boolean indicating whether the drone is currently landed.
True– The drone is landed.False– The drone is not landed.
用法:
drone.is_landed()
参数 |
描述 |
|---|---|
该方法没有参数。 |
# Celebrate a successful landing
drone.take_off(climb_to=500)
wait(1, SECONDS)
drone.land()
wait(1, SECONDS)
if drone.is_landed():
controller.sound.play(SUCCESS)