伺服电机#
介绍#
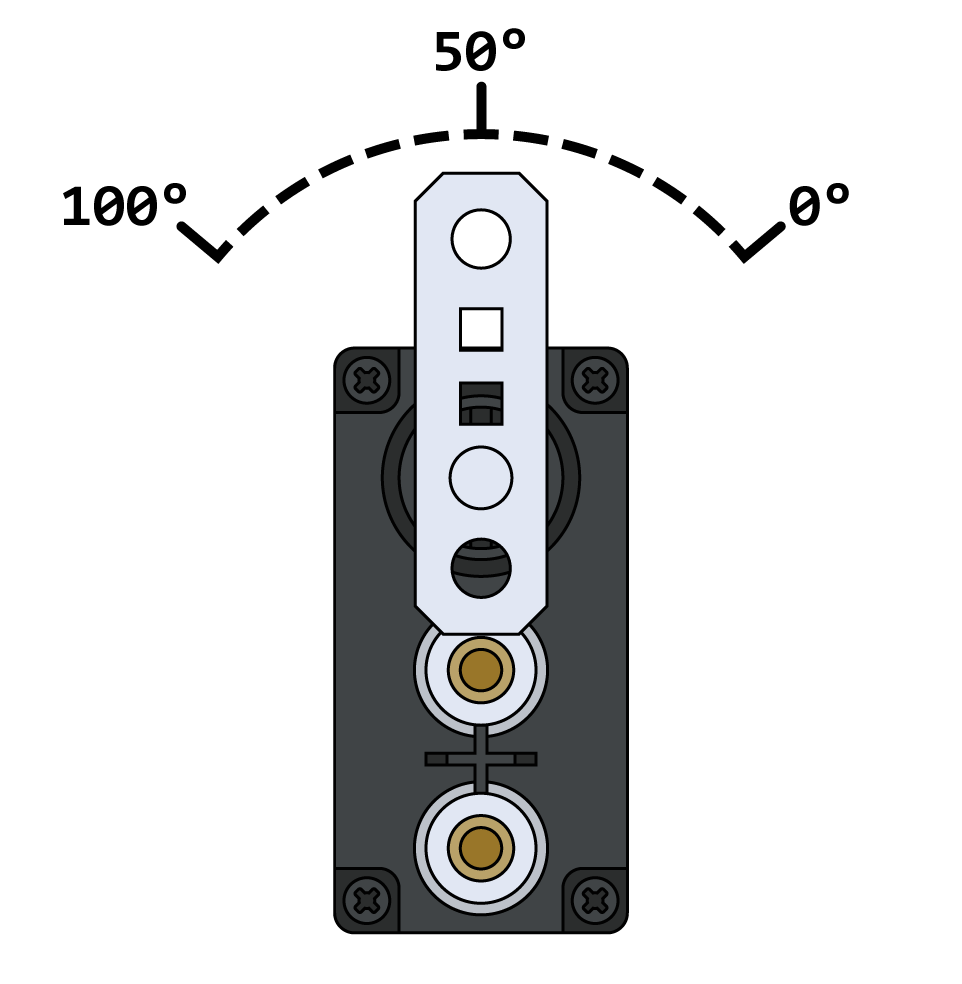
The servo class is used to control and configure a V5 3-Wire Servo Motor. The V5 3-Wire Servo Motor provides position-based control within a fixed range of motion.

类构造函数#
servo( triport::port& port );
类析构函数#
Destroys the servo object and releases associated resources.
~servo();
参数#
范围 |
类型 |
描述 |
|---|---|---|
|
|
The 3-Wire Port that the Servo Motor is connected to, written as |
笔记#
A Brain or 3-Wire Expander must be created first before they can be used to create an object with the
servoclass constructor.
例子#
// Create the servo instance on 3-Wire Port A
servo myServo = servo(Brain.ThreeWirePort.A);
成员功能#
The servo class includes the following member functions:
setPosition— Moves the servo motor to a specified position.
Before calling any servo member functions, a servo instance must be created, as shown below:
/* This constructor is required when using VS Code.
Servo configuration is generated automatically
in VEXcode using the Device Menu. Replace the values
as needed. */
// Create the servo instance on 3-Wire Port A
servo myServo = servo(Brain.ThreeWirePort.A);
setPosition#
将伺服电机移动到指定位置。
1 — 使用百分比值设置伺服位置。
void setPosition( int32_t value, percentUnits units );
Parameters2 — 使用旋转单位设置伺服位置。
void setPosition( double value, rotationUnits units );
范围 |
类型 |
描述 |
|---|---|---|
|
|
使用百分比单位表示的伺服位置值。 |
|
|
使用旋转单元时的伺服位置值。 |
|
|
The position unit: |
|
|
The position unit:
|
此函数不返回值。
Notes使用百分比单位时,有效范围为 0 – 100%。
伺服电机在开始每个项目之前,都会自动将自身调整到 50 度中心位置,然后再进行任何运动。
使用旋转单元时,伺服电机将移动到指定的绝对位置。
// Set the servo position to 10 percent
myServo.setPosition(10, percent);
// Set the servo position to 45.5 degrees
myServo.setPosition(45.5, degrees);
// Set the servo position to 90 degrees
myServo.setPosition(90, degrees);