外观#
打印#
打印块用于在打印控制台中打印值或文本。
打印 [Hello] ▶
打印块将在监视窗口选项卡内打印数据。
![]()
所有报告块默认打印为整数。使用设置打印精度块可以调整打印的小数位数。
默认情况下,打印块将保留在同一行,以便执行任何后续打印命令。通过展开打印块以显示并将光标设置到下一行,这将在打印后将光标移动到下一行。
打印 [Hello] ◀ 并设定光标为下一行
任何返回值的块都可以在Print块中使用。
在此示例中,在将光标移动到下一行之前,VR 机器人的起始 Y 位置会打印到打印控制台。
当开始
打印 [Starting Y Position:] ▶
打印 ([Y v] 位标为 [毫米 v]) ◀ 并设定光标为下一行
设置打印精度#
设置打印精度块用于设置使用打印块将变量和值打印到打印控制台时小数点后出现的位数。
设定打印精度为 [0.1 v]
选择插入的报告块将打印到屏幕上的精度级别。
个位 (1)(默认)
十分之一(0.1)
百分位 (0.01)
千分之一 (0.001)
所有数字 (0.000001)

在此示例中,在打印 VR 机器人的当前驱动旋转之前,打印精度设置为百分之一。
当开始
设定打印精度为 [0.01 v]
打印 (底盘转向角度值) ▶
清除所有行#
清除所有行块用于清除打印控制台中的所有行。
清除所有行
在此示例中,“项目已启动。”将打印到打印控制台,然后在 5 秒后清除。
当开始
打印 [Project has started.] ▶
等待 (5) 秒
清除所有行
将光标设置到下一行#
将光标设置为下一行块用于在使用打印块时将光标设置为打印控制台中的新行。
设定光标至下一行
在这个例子中,代码将打印“Hello”,并在显示屏的下一行打印“World!”
当开始
打印 [Hello] ▶
设定光标至下一行
打印 [World!] ▶
设置打印颜色#
设置打印颜色块用于设置打印到打印控制台的文本的颜色。
设定打印颜色为 [black v]
选择打印颜色:
黑色的
红色的
绿色的
蓝色的
在这个例子中,代码将以红色打印“Hello”。
设定打印颜色为 [红色 v]
打印 [Hello] ▶
在设置打印颜色块之后使用的任何打印块都将以程序中最近设置的颜色打印。
设置笔宽#
设置笔宽块用于设置 VR 笔将绘制的线条的宽度。
设定笔宽为 [thin v]
选择 VR 笔的宽度。默认情况下,VR 笔设置为细。
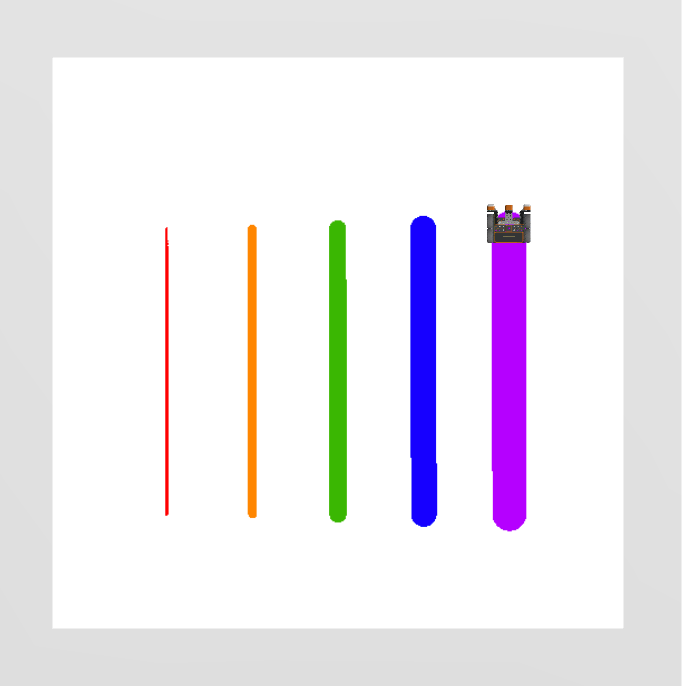
这是操场上不同宽度的一个例子。从左到右,依次为超薄、薄、中、宽和超宽。
在此示例中,在绘制 400 毫米线之前,VR Pen 的宽度设置为“超宽”。
当开始
设定笔宽为 [extra wide v]
移动笔 [向下 v]
驱动 [向前 v] (400) [毫米 v] ▶
移动笔#
移动笔块用于设置 VEX VR 笔的位置。
移动笔 [向下 v]
选择VR笔的位置:
向上——笔不会在板上画线。
向下 - 笔将在板上画一条彩色线。
在这个例子中,VR Pen 落下并在 Playground 上画了一条线。
当开始
移动笔 [向下 v]
驱动 [向前 v] (500) [毫米 v] ▶
将笔设置为颜色#
设置笔的颜色块用于设置 VEX VR 笔的颜色。
设定笔颜色为 [black v]
选择要绘制的线条的颜色。
黑色的
红色的
绿色的
蓝色的
在这个例子中,将笔的颜色设置为绿色,然后画一条线。
当开始
设定笔颜色为 [绿色 v]
移动笔 [向下 v]
驱动 [向前 v] (500) [毫米 v] ▶
设置笔颜色#
设置笔颜色块用于将 VEX VR 笔的颜色设置为指定的颜色。
设定打印颜色为 [black v]
使用滑块选择要创建的颜色的红、绿、蓝值。数值会列在颜色旁边(0 到 255)。
不透明度描述颜色的透明度。可以使用底部滑块选择画笔颜色的不透明度。
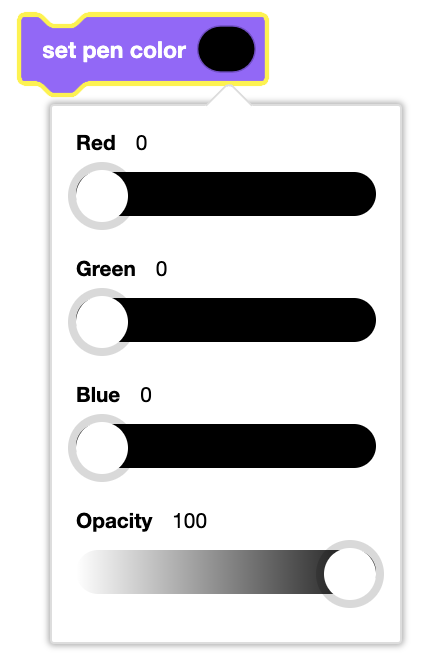
颜色窗口将更新以显示笔在游乐场上绘制的最终颜色,并且项目运行后,该颜色也将出现在 VR 机器人上的笔的顶部。
在这个例子中,VR机器人在画线之前已经将颜色设置为粉红色。
当开始
设定笔颜色为 (::#D900D9)
移动笔 [向下 v]
驱动 [向前 v] (500) [毫米 v] ▶
用颜色填充区域#
用颜色填充区域块将填充 VR 笔位于其上方的任何形状,例如:
|
|
|
|---|---|---|
网格线 |
网格方块 |
在没有网格的游乐场上,它填满了整个游乐场地板。 |
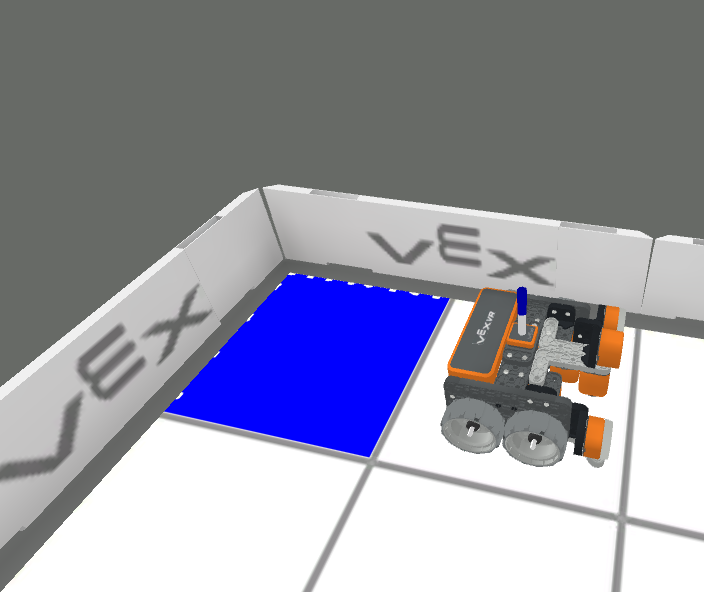
每个游乐场都有一个大小不一的网格,可以通过查看场地详情来查看。
填充区域用颜色 (::#000)
使用滑块选择要创建的颜色的红、绿、蓝值。数值会列在颜色旁边(0 到 255)。
不透明度描述颜色的透明度。可以使用底部滑块选择画笔颜色的不透明度。
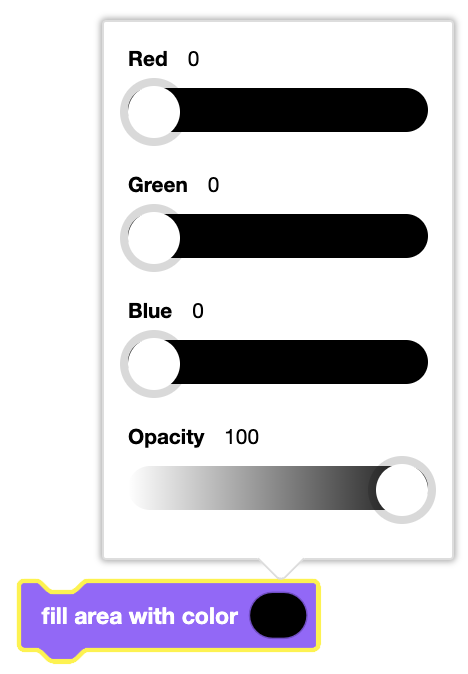
颜色窗口将更新以显示笔在游乐场上绘制的最终颜色。
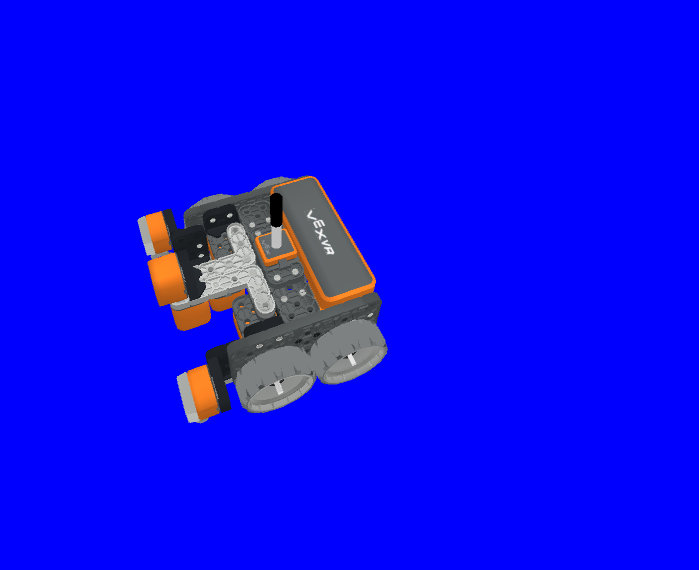
在这个例子中,操场的底部将填充橙色。
当开始
填充区域用颜色 (::#DD6600)