传感#
要将传感器放入监控控制台,请将其块拖放到屏幕右侧的监控图标上。
计时器#
重置计时器#
重置计时器块用于重置大脑的计时器。
重置计时器
Brain 的计时器在每个项目开始时启动。重置计时器积木用于将计时器重置回 0 秒。
在这个例子中,VR 机器人将向前行驶 3 秒,然后 Brain 的计时器重置并且传动系统停止。
当开始
驱动 [向前 v]
等待 (3) 秒
重置计时器
驱动停止
计时器值#
计时器值块用于报告大脑计时器的值(以秒为单位)。
(计时器秒数)
当程序启动时,Brain 的计时器从 0 秒开始,并以十进制值报告计时器的值。
计时器值报告块用于具有圆形空间的块内。
在此示例中,VR 机器人将等待 3 秒,然后在打印控制台中打印当前计时器值。
当开始
等待 (3) 秒
打印 (计时器秒数) ▶
传动系统#
驾驶已完成#
驱动完成块用于报告传动系统是否已完成其运动。
<驱动已结束?>
当传动系统的电机完成其运动时,驱动完成块会报告“True”。
当传动系统的电机仍在运转时,驱动已完成块会报告“False”。
驱动已完成块用于具有六边形(六面)空间的块中。
在此示例中,传动系统将向前行驶 50 英寸。VR 机器人开始移动一秒钟后,代码将开始检查传动系统是否已停止。一旦停止移动,它将把消息打印到打印控制台。
当开始
驱动 [向前 v] (50) [英寸 v] ◀ 并且不等待
等待 (1) 秒
等到 <驱动已结束?>
打印 [The Drivetrain has finished moving. ] ▶
驱动器正在移动#
驱动器正在移动块用于报告传动系统当前是否正在移动。
<驱动进行中?>
当传动系统的电机正在移动时,驱动器正在移动块报告“True”。
当传动系统的电机停止时,驱动器正在移动块会报告“False”。
驱动器正在移动块用于具有六边形(六面)空间的块中。
在此示例中,VR 机器人将向前移动 50 英寸。1 秒后,如果传动系统仍在运动,它将向打印控制台打印一条消息。
当开始
驱动 [向前 v] (50) [英寸 v] ◀ 并且不等待
等待 (1) 秒
如果 <驱动进行中?> 那么
打印 [The Drivetrain is moving.] ▶
结束
行驶方向#
Drive heading 块用于通过使用陀螺仪(Gyro)传感器的当前角度位置来报告传动系统所面对的航向。
(底盘归位角度值)
Drive heading 报告块报告的范围从 0.00 到 359.99 度。
Drive heading 报告块用于具有圆形空间的块内。
在此示例中,VR 机器人的当前行驶方向将被打印到打印控制台。
当开始
打印 (底盘归位角度值) ▶
驱动旋转#
驱动旋转块用于报告传动系统的旋转角度。
(底盘转向角度值)
当传动系统顺时针旋转时,驱动旋转报告块会报告正值。
当传动系统逆时针旋转时,驱动旋转报告块会报告负值。
驱动旋转报告块用于具有圆形空间的块内。
在此示例中,VR 机器人的当前旋转角度将被打印到打印控制台。
当开始
打印 (底盘转向角度值) ▶
保险杠传感器#
要确定您的 VR 机器人可以使用哪种保险杠传感器,请查阅您的游乐场的详细信息页面。
压制保险杠#
按下保险杠块用于报告保险杠开关是否被按下。
<[LeftBumper v] 按下了?>
如果按下了保险杠开关,则按下保险杠块会报告“True”。
如果未按下保险杠开关,则按下保险杠块将报告“False”。
选择要使用的保险杠开关。
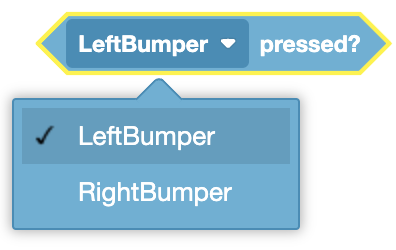
按压保险杠布尔块用于具有六边形(六面)空间的块中。
在此示例中,VR机器人将向前行驶,同时不断检查其右侧保险杠传感器是否被按下。如果传感器被按下,传动系统将停止。
当开始
驱动 [向前 v]
永久循环
如果 <[RightBumper v] 按下了?> 那么
驱动停止
结束
距离传感器#
要确定您的 VR 机器人可以使用哪些距离传感器,请查阅您的游乐场的详细信息页面。
距离发现物体#
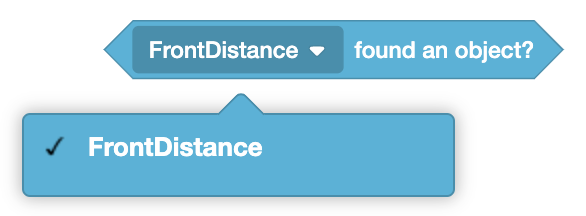
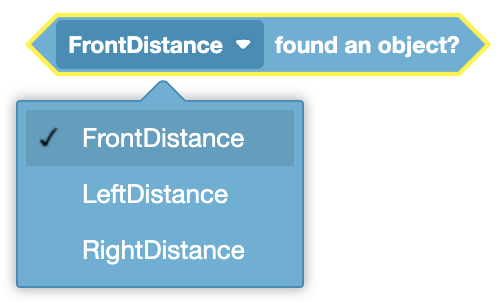
距离发现物体块用于报告内置距离传感器是否发现机器人前方的物体。
<[FrontDistance v] 发现对象?>
选择要使用的距离传感器。
基础 VR 机器人只能访问前距离传感器。
VR+ 机器人可以访问前、左和右距离传感器。
当内置距离传感器在其视野范围内且在传感器 3000 毫米范围内看到物体或表面时,距离发现物体 块会报告“True”。
当内置距离传感器未检测到 3000 毫米范围内的物体或表面时,距离发现物体 块会报告“False”。
距离发现物体块用于具有六边形(六面)空间的块中。
在此示例中,VR 机器人将无限向右旋转,直到前眼传感器检测到物体。当检测到物体时,它将停止旋转,并以毫米为单位打印传感器与物体之间的距离。
当开始
[右 v] 转
等到 <[FrontDistance v] 发现对象?>
驱动停止
打印 ([FrontDistance v] in [mm v]) ▶
距离#
距离块用于报告最近物体的距离。
([FrontDistance v] in [mm v])
选择要使用的距离传感器。
基础 VR 机器人只能访问前距离传感器。
VR+ 机器人可以访问前、左和右距离传感器。
选择距离块是以毫米还是英寸为单位报告。
距离块用于具有圆形空间的块内。
在此示例中,VR 机器人将无限向右旋转,直到前眼传感器检测到物体。当检测到物体时,它将停止旋转,并以毫米为单位打印传感器与物体之间的距离。
当开始
[右 v] 转
等到 <[FrontDistance v] 发现对象?>
驱动停止
打印 ([FrontDistance v] in [mm v]) ▶
眼睛传感器#
要确定您的 VR 机器人可以使用哪种眼部传感器,请查阅您的游乐场的详细信息页面。
眼睛传感器靠近物体#
靠近物体的眼睛传感器块用于报告颜色传感器眼睛是否足够靠近物体以检测颜色。
<[FrontEye v] 靠近对象?>
选择要使用的眼睛传感器。
当颜色传感器靠近具有可检测颜色的物体时,眼睛传感器靠近物体块会报告“真”。
当颜色传感器距离可检测颜色的物体不够近时,眼睛传感器靠近物体块会报告“False”。
靠近物体的眼睛传感器块用于具有六边形(六面)空间的块中。
在这个例子中,VR 机器人将向前行驶,直到前眼传感器足够靠近物体以检测到颜色,然后传动系统将停止。
当开始
驱动 [向前 v]
等到 <[FrontEye v] 靠近对象?>
驱动停止
眼睛传感器检测颜色#
眼睛传感器检测颜色块用于报告其中一个颜色传感器眼睛是否检测到指定的颜色。
<[FrontEye v] 测得 [红色 v]?>
选择要使用的眼睛传感器。
选择要检测的颜色。
当颜色传感器眼睛检测到所选颜色时,眼睛传感器检测颜色块报告“真”。
当颜色传感器眼睛检测到与所选颜色不同的颜色时,眼睛传感器检测颜色块会报告“False”。
眼睛传感器检测颜色块用于具有六边形(六面)空间的块中。
在此示例中,VR 机器人将向前行驶,直到前眼传感器检测到绿色物体。当前眼传感器检测到绿色物体时,VR 机器人将右转 90 度。
当开始
驱动 [向前 v]
等到 <[FrontEye v] 测得 [绿色 v]?>
[右 v] 转 (90) 度 ▶
颜色亮度#
颜色亮度块用于从其中一个颜色传感器眼睛报告物体的亮度。
([FrontEye v] 亮度百分比)
颜色亮度 模块报告物体的亮度。白色物体的亮度为 100%,黑色物体的亮度为 0%。所有其他颜色的亮度介于这两个值之间。
选择要使用的眼睛传感器。
颜色亮度块用于具有圆形空间的块中。
在这个例子中,VR机器人将向前行驶,直到前眼传感器足够接近以检测到物体的颜色,然后它将停止并打印物体的当前亮度。
当开始
驱动 [向前 v]
等到 <[FrontEye v] 靠近对象?>
驱动停止
打印 ([FrontEye v] 亮度百分比) ▶
位置传感器#
位置#
位置块用于报告 VR 机器人的 X 或 Y 坐标位置。
([X v] 位标为 [毫米 v])
选择返回 X 坐标还是 Y 坐标。
选择以毫米还是英寸为单位报告值。
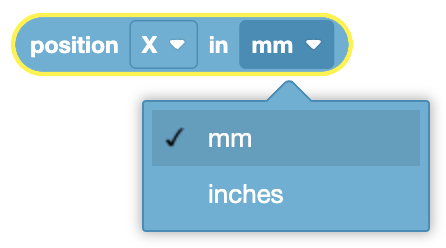
位置块用于具有圆形空间的块中。
在此示例中,VR 机器人的当前 Y 位置(以毫米为单位)将打印到打印控制台。
当开始
打印 ([Y v] 位标为 [毫米 v]) ▶
位置角#
位置角度块用于报告 VR 机器人的角度(以度为单位)。
(位标角度值)
位置角块用于具有圆形空间的块中。
在此示例中,VR 机器人的当前角度(以度为单位)将打印到打印控制台。
当开始
打印 (位标角度值) ▶