Detección#
Para colocar un sensor en la consola del monitor, arrastre y suelte su bloque en el ícono del monitor en el lado derecho de la pantalla.
Minutero#
Reiniciar temporizador#
El bloque Reiniciar temporizador se utiliza para reiniciar el temporizador del cerebro.
reiniciar el temporizador
El temporizador del cerebro comienza al inicio de cada proyecto. El bloque de reinicio del temporizador se utiliza para reiniciarlo a 0 segundos.
En este ejemplo, el robot VR avanzará durante 3 segundos antes de que el temporizador del cerebro se reinicie y el tren motriz se detenga.
cuando empezó
unidad [adelante v]
esperar (3) segundos
reiniciar el temporizador
deja de conducir
Valor del temporizador#
El bloque Valor del temporizador se utiliza para informar el valor del temporizador del cerebro en segundos.
(temporizador en segundos)
El temporizador del cerebro comienza en 0 segundos cuando se inicia el programa y reporta el valor del temporizador como un valor decimal.
El bloque informador Valor del temporizador se utiliza dentro de bloques con espacios circulares.
En este ejemplo, el robot VR esperará 3 segundos antes de imprimir el valor actual del temporizador en la consola de impresión.
cuando empezó
esperar (3) segundos
imprimir (temporizador en segundos) ▶
Transmisión#
La unidad está lista#
El bloque La conducción ha finalizado se utiliza para informar si el tren motriz ha completado su movimiento.
<¿La unidad está lista?>
El bloque La unidad ha finalizado informa Verdadero cuando los motores del tren motriz han completado su movimiento.
El bloque La unidad ha finalizado informa Falso cuando los motores del tren motriz aún están en movimiento.
El bloque La unidad está lista se utiliza en bloques con espacios hexagonales (de seis lados).
En este ejemplo, el tren motriz avanzará 127 cm. Un segundo después de que el robot de RV comience a moverse, el código comprobará si el tren motriz se ha detenido. Una vez que termine de moverse, imprimirá su mensaje en la consola de impresión.
cuando empezó
unidad [adelante v] para (50) [pulgadas v] ◀ y no esperes
esperar (1) segundos
esperar hasta <¿La unidad está lista?>
imprimir [The Drivetrain has finished moving. ] ▶
La unidad se está moviendo#
El bloque La unidad está en movimiento se utiliza para informar si el tren motriz se está moviendo actualmente.
<¿La unidad se está moviendo?>
El bloque La unidad se está moviendo informa Verdadero cuando los motores del tren motriz se están moviendo.
El bloque La unidad se está moviendo informa Falso cuando los motores del tren motriz están detenidos.
El bloque La unidad se está moviendo se utiliza en bloques con espacios hexagonales (de seis lados).
En este ejemplo, el robot de realidad virtual avanzará 127 cm. Tras un segundo, si el tren de potencia sigue en movimiento, imprimirá un mensaje en la consola de impresión.
cuando empezó
unidad [adelante v] para (50) [pulgadas v] ◀ y no esperes
esperar (1) segundos
si <¿La unidad se está moviendo?> entonces
imprimir [The Drivetrain is moving.] ▶
fin
Dirección de la unidad#
El bloque Rumbo de transmisión se utiliza para informar el rumbo hacia el que se dirige el tren motriz mediante la posición angular actual del sensor giroscópico (giroscopio).
(rumbo de la unidad en grados)
El bloque de reporte Encabezado de unidad informa un rango de 0,00 a 359,99 grados.
El bloque de reportero Encabezado de unidad se utiliza dentro de bloques con espacios circulares.
En este ejemplo, el encabezado de unidad actual del robot VR se imprimirá en la consola de impresión.
cuando empezó
imprimir (rumbo de la unidad en grados) ▶
Rotación de la unidad#
El bloque Rotación de transmisión se utiliza para informar el ángulo de rotación del tren motriz.
(rotación de la unidad en grados)
El bloque de reporte Rotación de unidad informa un valor positivo cuando el tren motriz gira en el sentido de las agujas del reloj.
El bloque de reporte Rotación de unidad informa un valor negativo cuando el tren motriz gira en sentido antihorario.
El bloque reportero Rotación de unidad se utiliza dentro de bloques con espacios circulares.
En este ejemplo, el ángulo de rotación actual del robot VR se imprimirá en la consola de impresión.
cuando empezó
imprimir (rotación de la unidad en grados) ▶
Sensor de parachoques#
Para identificar qué sensores de parachoques puede utilizar su robot VR, consulte la página de detalles de su área de juegos.
Parachoques prensado#
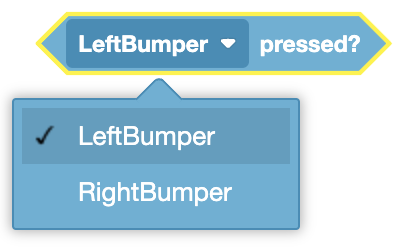
El bloque Parachoques presionado se utiliza para informar si el interruptor de parachoques está presionado.
<[LeftBumper v] presionado?>
El bloque Parachoques presionado informa Verdadero si se presiona el interruptor de parachoques.
El bloque Parachoques presionado informa Falso si el interruptor de parachoques no está presionado.
Elige qué interruptor de parachoques utilizar.
El bloque booleano Presionando parachoques se utiliza en bloques con espacios hexagonales (de seis lados).
En este ejemplo, el robot de RV avanzará mientras comprueba constantemente si se ha presionado el sensor del parachoques derecho. Si se presiona el sensor, el tren motriz se detendrá.
cuando empezó
unidad [adelante v]
para siempre
si <[RightBumper v] presionado?> entonces
deja de conducir
fin
Sensor de distancia#
Para identificar qué sensores de distancia puede utilizar su robot VR, consulte la página de detalles de su área de juegos.
Distancia del objeto encontrado#
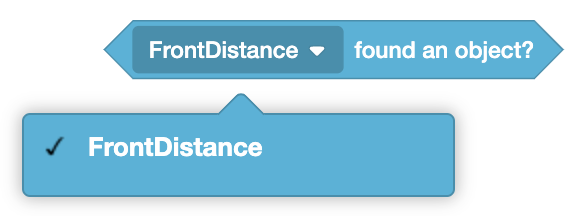
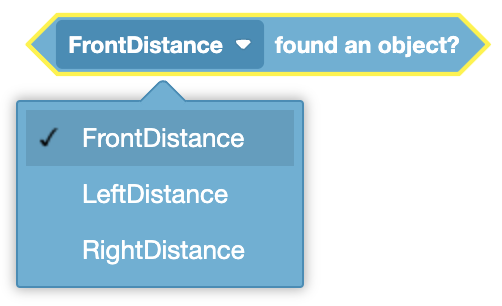
El bloque distancia encontrada del objeto se utiliza para informar si el sensor de distancia incorporado ha encontrado un objeto delante del robot.
<[FrontDistance v] Encontraste un objeto?>
Elija qué sensor de distancia utilizar.
El robot VR base solo tiene acceso al sensor de distancia Frontal.
El robot VR+ tiene acceso a los sensores de distancia Frontal, Izquierdo y Derecho.
El bloque Objeto encontrado a distancia informa Verdadero cuando el sensor de distancia incorporado detecta un objeto o una superficie dentro de su campo de visión y dentro de los 3000 mm del sensor.
El bloque Objeto encontrado a distancia informa Falso cuando el sensor de distancia incorporado no detecta un objeto o superficie dentro de los 3000 mm.
El bloque Objeto encontrado a distancia se utiliza en bloques con espacios hexagonales (de seis lados).
En este ejemplo, el robot de realidad virtual girará a la derecha indefinidamente hasta que el sensor ocular frontal detecte un objeto. Al detectarlo, dejará de girar e imprimirá la distancia entre el sensor y el objeto en milímetros.
cuando empezó
turno [derecha v]
esperar hasta <[FrontDistance v] Encontraste un objeto?>
deja de conducir
imprimir ([FrontDistance v] in [mm v]) ▶
Distancia desde#
El bloque distancia desde se utiliza para informar la distancia del objeto más cercano.
([FrontDistance v] in [mm v])
Elija qué sensor de distancia utilizar.
El robot VR base solo tiene acceso al sensor de distancia Frontal.
El robot VR+ tiene acceso a los sensores de distancia Frontal, Izquierdo y Derecho.
Elija si el bloque Distancia desde se expresa en milímetros o pulgadas.
El bloque Distancia desde se utiliza dentro de bloques con espacios circulares.
En este ejemplo, el robot de realidad virtual girará a la derecha indefinidamente hasta que el sensor ocular frontal detecte un objeto. Al detectarlo, dejará de girar e imprimirá la distancia entre el sensor y el objeto en milímetros.
cuando empezó
turno [derecha v]
esperar hasta <[FrontDistance v] Encontraste un objeto?>
deja de conducir
imprimir ([FrontDistance v] in [mm v]) ▶
Sensor ocular#
Para identificar qué sensores oculares puede utilizar su robot VR, consulte la página de detalles de su área de juegos.
Sensor ocular de objeto cercano#
El bloque Sensor ocular cercano a objeto se utiliza para informar si el sensor ocular de color está lo suficientemente cerca de un objeto para detectar un color.
<[FrontEye v] está cerca del objeto?>
Elija qué sensor ocular utilizar.
El bloque Sensor de ojo cerca de objeto informa Verdadero cuando el sensor de color está cerca de un objeto que tiene colores detectables.
El bloque Sensor de ojo cerca de objeto informa Falso cuando el sensor de color no está lo suficientemente cerca de un objeto con colores detectables.
El bloque Sensor ocular de objeto cercano se utiliza en bloques con espacios hexagonales (de seis lados).
En este ejemplo, el robot VR avanzará hasta que el sensor ocular frontal esté lo suficientemente cerca del objeto para detectar un color; luego, el tren motriz se detendrá.
cuando empezó
unidad [adelante v]
esperar hasta <[FrontEye v] está cerca del objeto?>
deja de conducir
El sensor ocular detecta el color#
El bloque El sensor ocular detecta color se utiliza para informar si uno de los ojos del sensor de color detecta un color específico.
<[FrontEye v] detecta [rojo v]?>
Elija qué sensor ocular utilizar.
Elige qué color quieres detectar.
El bloque Sensor ocular detecta color informa Verdadero cuando el sensor de color del ojo detecta el color seleccionado.
El bloque Sensor ocular detecta color informa Falso cuando el sensor de color del ojo detecta un color diferente al seleccionado.
El bloque Sensor ocular detecta el color se utiliza en bloques con espacios hexagonales (de seis lados).
En este ejemplo, el robot de RV avanzará hasta que el sensor ocular frontal detecte un objeto verde. Cuando el sensor ocular frontal detecte un objeto verde, el robot de RV girará 90 grados a la derecha.
cuando empezó
unidad [adelante v]
esperar hasta <[FrontEye v] detecta [verde v]?>
girar [derecha v] por (90) grado ▶
Brillo del color#
El bloque Brillo de color se utiliza para informar el brillo de un objeto desde uno de los ojos del sensor de color.
([FrontEye v] brillo en %)
El bloque Brillo de color indica el brillo de un objeto. Los objetos blancos tendrán un brillo del 100 %, mientras que los negros tendrán un brillo del 0 %. Los demás colores tendrán un brillo entre estos valores.
Elija qué sensor ocular utilizar.
El bloque Brillo de color se utiliza en bloques con espacios circulares.
En este ejemplo, el robot VR avanzará hasta que el sensor ocular frontal esté lo suficientemente cerca para detectar el color del objeto, luego se detendrá e imprimirá el brillo actual del objeto.
cuando empezó
unidad [adelante v]
esperar hasta <[FrontEye v] está cerca del objeto?>
deja de conducir
imprimir ([FrontEye v] brillo en %) ▶
Sensor de ubicación#
Posición#
El bloque Posición se utiliza para informar la posición de las coordenadas X o Y del robot VR.
(posición [X v] en [mm v])
Elija si desea devolver la coordenada X o la coordenada Y.
Elija si el valor se informa en mm o pulgadas.
El bloque Posición se utiliza en bloques con espacios circulares.
En este ejemplo, la posición Y actual del robot VR en milímetros se imprimirá en la consola de impresión.
cuando empezó
imprimir (posición [Y v] en [mm v]) ▶
Ángulo de posición#
El bloque Ángulo de posición se utiliza para informar el ángulo del robot VR en grados.
(ángulo de posición en grados)
El bloque Ángulo de posición se utiliza en bloques con espacios circulares.
En este ejemplo, el ángulo actual del robot VR en grados se imprimirá en la consola de impresión.
cuando empezó
imprimir (ángulo de posición en grados) ▶