Transmisión#
Introducción#
El sistema de transmisión incluye ruedas y motores que controlan cómo el robot se desplaza y gira. Estos sistemas se pueden encontrar en robots como Code Base 2.0, Super Car o en robots personalizados.
Los sistemas de transmisión utilizan el sensor inercial (Inertial.md) del sistema de control para detectar colisiones y ayudar al robot a moverse y girar con precisión. Al inicio de cada proyecto, el sistema de transmisión calibra automáticamente el sensor inercial. Mantenga el robot inmóvil durante aproximadamente 2 segundos durante la calibración para que pueda moverse y girar correctamente.
Existen muchas maneras de programar el sistema de transmisión. A continuación se muestra una lista de todos los bloques del sistema de transmisión:
Acciones: Mover y girar el robot.
drive — Mueve el robot hacia adelante o hacia atrás indefinidamente.
drive for — Mueve el robot hacia adelante o hacia atrás una distancia específica.
conducir hasta — Mueve el robot hacia adelante o hacia atrás hasta que el sensor ocular detecte un objeto o el robot detecte un choque.
giro — Gira el robot hacia la izquierda o hacia la derecha indefinidamente.
girar para — Gira el robot hacia la izquierda o hacia la derecha un número específico de grados.
girar rumbo — Gira el robot para que mire hacia un rumbo específico de -359 a 359 grados. El robot girará en la dirección más corta para alcanzar el rumbo objetivo.
girar a rotación — Gira el robot a una rotación específica.
detener conducción — Detiene el movimiento del robot.
Ajustes: Ajuste la configuración de la transmisión.
establecer velocidad de conducción — Indica al robot a qué velocidad debe conducir.
establecer velocidad de giro — Indica al robot a qué velocidad debe girar.
set drive stopping — Indica cómo el robot dejará de moverse: frenando, dejándose llevar por inercia o manteniéndose en reposo.
set drive timeout — Establece cuántos segundos el robot intentará terminar un movimiento.
establecer rumbo de conducción — Cambia el rumbo actual del robot a un nuevo rumbo.
establecer rotación de accionamiento — Cambia la rotación actual del robot a una nueva rotación.
Valores: comprobar el estado del movimiento.
el movimiento ha terminado — Informa si el robot ha terminado de moverse.
dirección de conducción — Informa la dirección actual del robot de 0 a 359 grados.
rotación de accionamiento — Informa la rotación actual del robot.
velocidad de conducción — Indica la velocidad a la que se desplaza el robot, como un porcentaje de -100% a 100%.
Comportamiento#
conducir#
El bloque de accionamiento mueve el robot hacia adelante o hacia atrás indefinidamente. El robot seguirá moviéndose hasta que se le indique otra acción, como girar o detenerse.
unidad [adelante v]
Parámetros |
Descripción |
|---|---|
dirección |
La dirección en la que se mueve el robot: hacia adelante o hacia atrás. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Drive forward then stop.]
unidad [adelante v]
esperar (2) segundos
deja de conducir
conducir para#
El bloque de la pila drive for mueve el robot hacia adelante o hacia atrás una distancia específica. El proyecto esperará a que el robot termine de moverse antes de ejecutar el siguiente bloque de la pila.
unidad [adelante v] para [100] [mm v] ▶
Parámetros |
Descripción |
|---|---|
dirección |
La dirección en la que se mueve el robot: hacia adelante o hacia atrás. |
distancia |
La distancia que recorre el robot. Puede ser un número entero o decimal. |
unidad |
La unidad de distancia: mm (milímetros) o pulgadas. |
y no esperes |
Seleccione la flecha ( ▶ ) para expandir el bloque y decir y no espere, de modo que el siguiente bloque en la pila se ejecutará inmediatamente. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Drive back and forth.]
unidad [adelante v] para [100] [mm v] ▶
unidad [atrás v] para [4] [pulgadas v] ▶
conducir hasta#
El bloque de apilamiento drive until mueve el robot hacia adelante o hacia atrás hasta que el sensor ocular detecta un objeto o el robot detecta una colisión.
Conducir [adelante v] al [objeto v] ▶
Parámetros |
Descripción |
|---|---|
dirección |
La dirección en la que se mueve el robot: hacia adelante o hacia atrás. |
condición |
La condición que detiene al robot: objeto o choque. |
y no esperes |
Seleccione la flecha ( ▶ ) para expandir el bloque y decir y no espere, de modo que el siguiente bloque en la pila se ejecutará inmediatamente. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Turn right after a crash.]
Conducir [adelante v] al [choque v] ▶
girar [derecha v] por (90) grado ▶
doblar#
El bloque de pila giro hace girar al robot hacia la izquierda o hacia la derecha indefinidamente. El robot seguirá girando hasta que se le indique otra acción, como detenerse.
turno [derecha v]
Parámetros |
Descripción |
|---|---|
dirección |
La dirección en la que gira el robot: izquierda o derecha. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Turn right and left, then stop.]
turno [derecha v]
esperar [2] segundos
turno [izquierda v]
esperar [2] segundos
deja de conducir
girar para#
El bloque turn for hace girar el robot hacia la izquierda o hacia la derecha un número específico de grados. El giro es relativo a la posición actual del robot. El programa esperará a que el robot termine de girar antes de ejecutar el siguiente bloque.
girar [derecha v] por (90) grado ▶
Parámetros |
Descripción |
|---|---|
dirección |
La dirección en la que gira el robot: izquierda o derecha. |
ángulo |
El número de grados que gira el robot. Puede ser un número entero o decimal. |
y no esperes |
Seleccione la flecha ( ▶ ) para expandir el bloque y decir y no espere, de modo que el siguiente bloque en la pila se ejecutará inmediatamente. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Turn right then left.]
girar [derecha v] por (90) grado ▶
girar [izquierda v] por (90) grado ▶
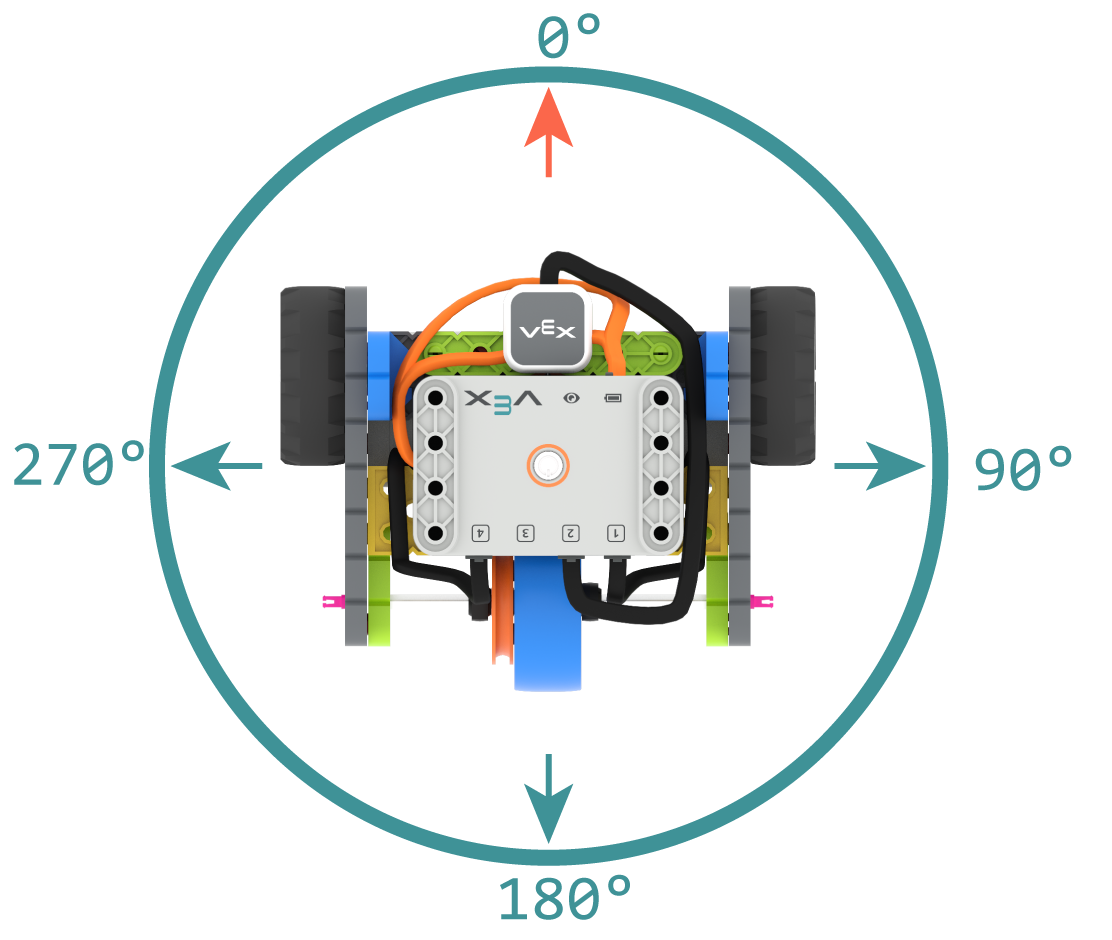
girar al rumbo#
El rumbo es la dirección hacia la que apunta el cerebro del robot, medida en grados. El bloque girar a rumbo hace que el robot gire para apuntar a un rumbo específico, desde -359 hasta 359 grados. El robot girará en la dirección más corta para alcanzar el rumbo objetivo.
El rumbo inicial es de 0 grados.
El proyecto esperará a que el robot termine de girar antes de ejecutar el siguiente bloque de la pila.
girar hacia el rumbo [90] grados ▶
Parámetros |
Descripción |
|---|---|
título |
La dirección hacia la que debe mirar el robot, expresada como un número entero, entre -359 y 359 grados. |
y no esperes |
Seleccione la flecha ( ▶ ) para expandir el bloque y decir y no espere, de modo que el siguiente bloque en la pila se ejecutará inmediatamente. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Turn to face the cardinal directions.]
girar hacia el rumbo [90] grados ▶
esperar [1] segundos
girar hacia el rumbo [180] grados ▶
esperar [1] segundos
girar hacia el rumbo [270] grados ▶
esperar [1] segundos
girar hacia el rumbo [0] grados ▶
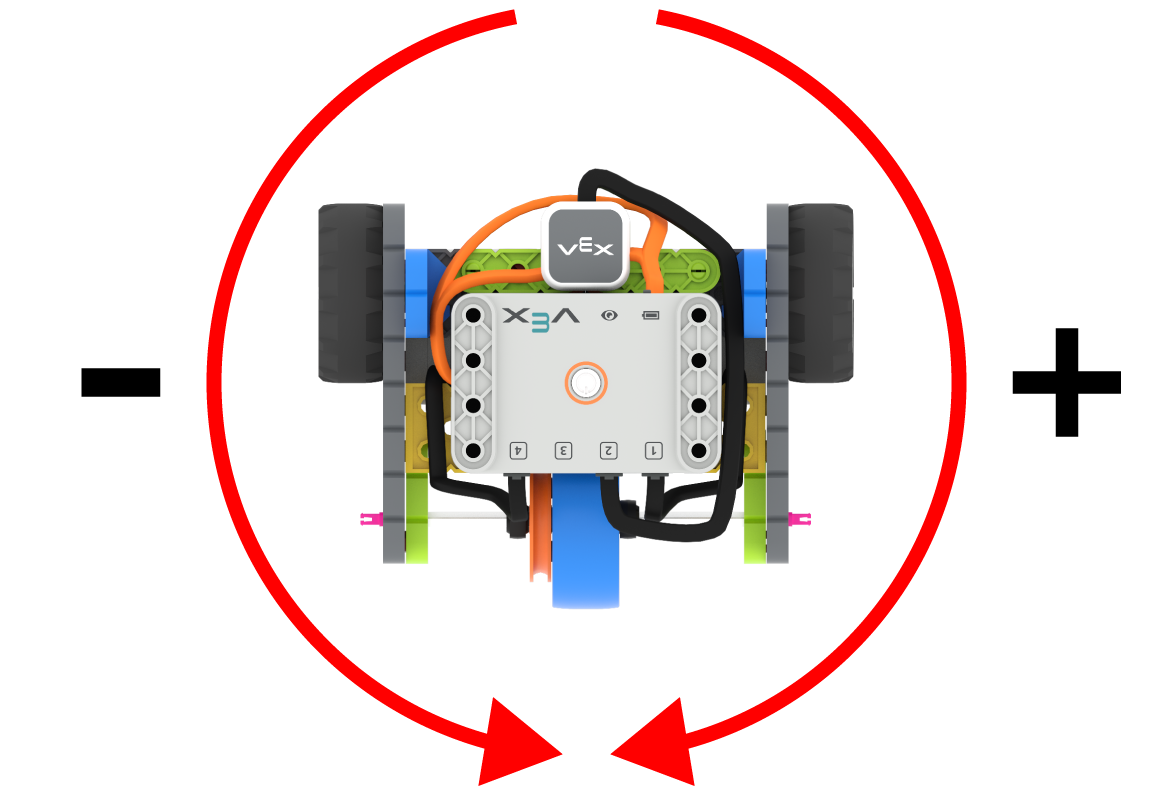
pasar a rotación#
El bloque apilable girar para rotar hace que el robot gire a una rotación específica.
La rotación indica cuánto ha girado el robot, medida en grados. Al inicio de un proyecto, el valor de rotación se establece en 0 grados. La rotación también se puede configurar mediante el bloque establecer rotación de accionamiento.
Los valores de rotación son absolutos. Esto significa que la dirección del giro depende de la rotación actual del robot. Girar a la derecha aumenta la rotación, y girar a la izquierda la disminuye.
Por ejemplo, si el robot comienza en 0 grados y se le da una rotación de 720 grados, girará dos veces a la derecha. Si luego se le da una rotación de 360 grados, girará una vez a la izquierda, ya que 360 es menor que 720.
El proyecto esperará a que el robot termine de girar antes de ejecutar el siguiente bloque de la pila.
girar a rotación (90) grados ▶
Parámetros |
Descripción |
|---|---|
rotación |
El valor de rotación, en grados, que alcanzará el robot. Puede ser un número entero. |
y no esperes |
Seleccione la flecha ( ▶ ) para expandir el bloque y decir y no espere, de modo que el siguiente bloque en la pila se ejecutará inmediatamente. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Make one full turn to the right.]
girar a rotación [360] grados ▶
[Make another full turn to the right.]
girar a rotación [720] grados ▶
[Make one full turn to the left, returning to 360 degrees.]
girar a rotación [360] grados ▶
deja de conducir#
El bloque de apilamiento detener conducción detiene el movimiento del robot.
deja de conducir
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Drive forward then stop.]
unidad [adelante v]
esperar (2) segundos
deja de conducir
Ajustes#
establecer la velocidad de conducción#
El bloque establecer velocidad de conducción indica al robot a qué velocidad debe conducir. Un porcentaje mayor hace que el robot conduzca más rápido y un porcentaje menor hace que conduzca más despacio.
Todos los proyectos comienzan con el robot conduciendo al 50% de su velocidad por defecto.
Nota: Una mayor velocidad hace que el robot se desplace más rápido, pero puede ser menos preciso. Una menor velocidad hace que el robot se desplace más despacio, pero es más preciso.
set drive velocity to [50] %
Parámetros |
Descripción |
|---|---|
velocidad |
La velocidad de conducción varía del 0% al 100%. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Drive at different velocities.]
unidad [adelante v] para [100] [mm v] ▶
esperar [1] segundos
[Drive slow.]
set drive velocity to [20] %
unidad [adelante v] para [100] [mm v] ▶
esperar [1] segundos
[Drive fast.]
set drive velocity to [100] %
unidad [adelante v] para [100] [mm v] ▶
establecer la velocidad de giro#
El bloque de pila establecer velocidad de giro indica al robot la velocidad a la que debe girar. Un porcentaje mayor hace que el robot gire más rápido y un porcentaje menor hace que gire más lento.
Todos los proyectos comienzan con el robot girando al 50% de su velocidad por defecto.
Nota: Una mayor velocidad hace que el robot gire más rápido, pero puede ser menos preciso. Una menor velocidad hace que el robot gire más despacio, pero es más preciso.
set turn velocity to [50] %
Parámetros |
Descripción |
|---|---|
velocidad |
La velocidad de giro varía del 0% al 100%. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Turn at different velocities.]
girar [derecha v] por [180] grado ▶
esperar [1] segundos
[Turn fast.]
set turn velocity to [100] %
girar [derecha v] por [180] grado ▶
Establecer la parada de la unidad#
El bloque de configuración set drive stopping establece cómo se detendrá el robot: frenando, dejándose llevar por inercia o manteniéndose en posición.
Establecer la detención de la unidad en [freno v]
Parámetros |
Descripción |
|---|---|
comportamiento de detención |
Cómo se detendrá el robot:
|
Si no se utiliza este bloque, el robot utilizará el freno al detenerse.
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Drive, then coast to a stop.]
set drive velocity to [100] %
Establecer la detención de la unidad en [libre v]
unidad [adelante v]
esperar [2] segundos
deja de conducir
establecer el tiempo de espera de la unidad#
El bloque set drive timeout de la pila establece cuántos segundos intentará el robot completar un movimiento. Si el robot no puede terminar en ese tiempo, dejará de intentarlo y pasará al siguiente bloque de la pila. Esto evita que el robot se quede atascado en un movimiento.
Establezca el tiempo de espera de la unidad en [1] segundos
Parámetros |
Descripción |
|---|---|
tiempo |
El número de segundos que el robot puede intentar para completar un movimiento. Puede ser un número entero o decimal. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Drive as far as possible for 1 second before turning right.]
Establezca el tiempo de espera de la unidad en [1] segundos
unidad [adelante v] para [25] [pulgadas v] ▶
girar [derecha v] por [90] grado ▶
establecer el rumbo de la unidad#
La orientación es la dirección hacia la que apunta el cerebro del robot, medida en grados. El bloque de pila establecer orientación cambia la orientación actual del robot a un nuevo valor.
Por ejemplo, si el robot ha girado para mirar hacia la derecha, al establecer la orientación a 0 grados, esa posición mirando hacia la derecha se convierte en la nueva posición de 0 grados. Entonces, el robot puede girar a otras posiciones en función de esa nueva orientación.
establecer el rumbo de la unidad a [0] grados
Parámetros |
Descripción |
|---|---|
título |
El valor de rumbo, en grados, que se debe configurar para el robot. Puede ser un número entero entre 0 y 359. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Face the new 0 degree heading.]
establecer el rumbo de la unidad a [90] grados
girar hacia el rumbo [0] grados ▶
establecer la rotación de la unidad#
La rotación indica cuánto ha girado el robot, medida en grados. Al inicio de un proyecto, el valor de rotación se establece en 0 grados. El bloque establecer rotación de accionamiento modifica la rotación actual del robot a un nuevo valor.
Por ejemplo, si el robot ha dado dos vueltas completas a la derecha, su valor de rotación será de 720 grados. Si se establece la rotación en 0 grados, esta volverá a su valor original. A partir de ahí, el robot podrá girar según ese nuevo valor.
establecer la rotación de la unidad a (0) grados
Parámetros |
Descripción |
|---|---|
rotación |
El valor de rotación, en grados, que se debe configurar para el robot. Puede ser un número entero. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Spin counterclockwise two times.]
establecer la rotación de la unidad a [720] grados
girar a rotación [0] grados ▶
Valores#
El viaje ha terminado.#
El bloque booleano drive is done indica si el robot ha terminado de moverse. Esto permite controlar la sincronización de otras acciones en función del movimiento del robot.
Verdadero — El robot ha terminado de moverse.
Falso — El robot sigue en movimiento.
Este bloque funciona junto con los siguientes bloques de tren motriz que tienen el parámetro y no esperar: conducir para, conducir hasta, girar para, girar a rumbo y girar a rotación.
<¿La unidad está lista?>
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Turn when the drivetrain is done moving forward.]
unidad [adelante v] para [100] [mm v] ◀ y no esperes
esperar [0.25] segundos
para siempre
si <¿La unidad está lista?> entonces
girar [derecha v] por [180] grado ▶
romper
demás
imprimir [Still moving...] ▶
esperar [0.1] segundos
borrar todas las filas
rumbo de la unidad#
La orientación es la dirección hacia la que apunta el cerebro del robot, medida en grados. El bloque de informe orientación de conducción informa sobre dicha orientación en un rango de 0 a 359 grados.
La dirección inicial del robot es de 0 grados.
(rumbo de la unidad en grados)
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Display the heading while turning.]
girar [derecha v] por [450] grado ◀ y no esperes
para siempre
borrar todas las filas
imprimir (rumbo de la unidad en grados) ▶
esperar [0.1] segundos
rotación de la unidad#
La rotación indica cuánto ha girado el robot, medida en grados. Al inicio de un proyecto, el valor de rotación se establece en 0 grados. El bloque de informe drive rotation informa sobre la rotación actual del robot.
Girar a la derecha aumenta la rotación, y girar a la izquierda la disminuye. Por ejemplo, al dar dos vueltas completas a la derecha se registrará una rotación de 720 grados.
(rotación de la unidad en grados)
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Display the rotation while turning.]
girar [derecha v] por [450] grado ◀ y no esperes
para siempre
borrar todas las filas
imprimir (rotación de la unidad en grados) ▶
esperar [0.1] segundos
velocidad de accionamiento#
El bloque de informe de velocidad de conducción indica la velocidad a la que se desplaza el robot, expresada como un porcentaje entre -100 % y 100 %.
Un valor positivo significa que el robot avanza. Un valor negativo significa que el robot retrocede.
(velocidad de accionamiento en %)
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó :: hat events
[Build Used: Code Base 2.0]
[Display the velocity of the robot before and while moving.]
imprimir [Start: ] ▶
imprimir (velocidad de accionamiento en %) ▶
colocar el cursor en la siguiente fila
unidad [adelante v]
esperar [0.5] segundos
imprimir [Moving: ] ▶
imprimir (velocidad de accionamiento en %) ▶
deja de conducir