Controlador#
Introducción#
El V5 Brain se puede conectar a un controlador V5. Un controlador V5 cuenta con dos joysticks analógicos y varios botones que el Brain puede usar para detectar movimientos y pulsaciones.
This page uses Controller1 as the example V5 Controller name. Replace these with your own configured name as needed.
A continuación se muestra una lista de todos los métodos disponibles:
Acciones: activa o desactiva las acciones programadas del controlador.
rumble— Sends a rumble string to the V5 Controller.print— Prints text on the Controller’s screen.setCursor— Sets the cursor position used for printing text on the Controller’s screen.newLine— Moves the cursor to the beginning of the next row.clearScreen— Clears the whole screen.clearLine— Clears a screen row.RemoteControlCodeEnabled— Enable or disable Controller configured actions.
Getters: leen estados de botones y posiciones del joystick.
.pressing— Returns whether the specified button is being pressed..position— Returns the position of the joystick’s specified axis.column— Returns the current column where text will be printed as an integer.row— Returns the current row where text will be printed as an integer.
Devolución de llamada: ejecuta el código cuando los botones o joysticks cambian de estado.
.pressed— Registers a callback function for when the specified button is pressed..released— Registers a callback function for when the specified button is released..changed— Registers a callback function for when the joystick’s axis changes.
Constructores: inicializan y configuran manualmente el controlador.
Controller— Create a controller.
Comportamiento#
rumble#
rumble sends a rumble string to the V5 Controller.
Uso:
Controller.rumble(pattern);
Parámetro |
Descripción |
|---|---|
|
A pattern using |
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Rumble the V5 Controller to the pattern short-short-long-long.
Controller1.rumble("..--");
}
print#
print prints text on the controller’s screen using the current cursor position.
Uso:
Controller.Screen.print(value, sep, precision);
Parámetro |
Descripción |
|---|---|
|
El texto que se imprimirá en la pantalla del controlador. |
|
Optional. A string to inset between values. This must be written as a keyword argument (sep=). The default is |
|
Optional. The number of decimal places to display when printing simple numbers. This must be written as a keyword argument ( |
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Print the number 1 on the screen.
Controller1.Screen.print(1);
}
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Print the numbers 1, 2, 3 and 4 on the screen.
Controller1.Screen.print("1, 2, 3, 4");
}
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Print the number 1 on the screen.
Motor1.spin(forward);
wait(2,seconds);
Controller1.Screen.print("motor1 : %7.2f", Motor1.velocity(percent));
}
setCursor#
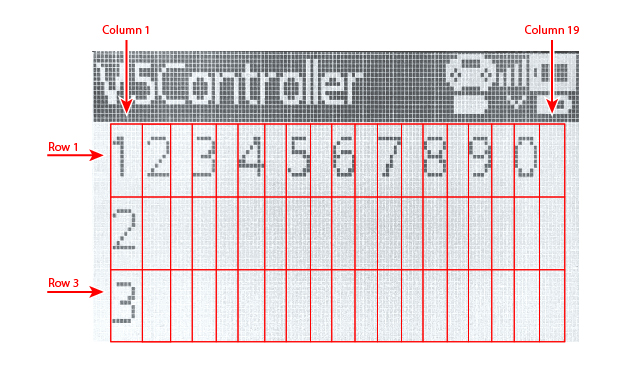
setCursor sets the cursor to a specific row and column on the controller’s screen. The controller screen has 3 rows and 19 columns.
Uso:
Controller.Screen.setCursor(row, col);
Parámetro |
Descripción |
|---|---|
|
La fila del cursor del 1 al 3. |
|
La columna del cursor del 1 al 19. |
newLine#
newLine method moves the cursor to the beginning of the next line.
Uso:
Controller.Screen.newLine();
Parámetros |
Descripción |
|---|---|
Este método no tiene parámetros. |
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Clear screen to print to multiple lines
Controller1.Screen.clearScreen();
Controller1.Screen.setCursor(1,1);
// Print text on both rows
Controller1.Screen.print("VEX V5");
Controller1.Screen.newLine();
Controller1.Screen.print("Controller");
}
clearScreen#
clearScreen clears the whole screen.
Uso:
Controller.Screen.clearScreen();
Parámetros |
Descripción |
|---|---|
Este método no tiene parámetros. |
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Print text and then clear the screen.
Controller1.Screen.print("VEX V5");
wait(2000, msec);
Controller1.Screen.clearScreen();
}
clearLine#
clearLine clears a screen row.
Uso predeterminado:
Controller.Screen.clearLine(line);
Overload Usages:
Controller.Screen.clearLine();
Parámetros |
Descripción |
|---|---|
|
La línea a borrar del 1 al 3. Si no se especifica, se borrará la línea actual. |
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Clear screen to print to multiple lines
Controller1.Screen.clearScreen();
Controller1.Screen.setCursor(1,1);
// Print text
Controller1.Screen.print("VEX V5");
Controller1.Screen.newLine();
Controller1.Screen.print("Controller");
wait(2000, msec);
// Clear row 2.
Controller1.Screen.clearLine(2);
}
RemoteControlCodeEnabled#
RemoteControlCodeEnabled is a variable that can be set to a boolean that enables or disables controller configured actions from the Devices menu. The controller is enabled by default. It can be set to either of the following:
true— Enable controller configured actions.false— Disable controller configured actions.
Usage:
RemoteControlCodeEnabled = false;
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Drive forward or backward using the left joystick
RemoteControlCodeEnabled = false;
while (true) {
if (Controller1.Axis3.position() > 0) {
Drivetrain.drive(forward);
} else if (Controller1.Axis3.position() < 0) {
Drivetrain.drive(reverse);
// Press A to use the controller configured actions
} else if (Controller1.ButtonA.pressing()) {
break;
} else {
Drivetrain.stop();
}
wait(20, msec);
}
RemoteControlCodeEnabled = true;
}
Captadores#
.pressing#
.pressing returns an integer indicating whether a specific button on the controller is currently being pressed. This method must be called on a specific button object, such as ButtonDown (see full list of button objects below).
1— The specified button is being pressed.0— The specified button is not being pressed.
Uso:
Se puede usar uno de los doce objetos de botón disponibles con este método, como se muestra a continuación:

Botón |
Dominio |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Parámetros |
Descripción |
|---|---|
Este método no tiene parámetros. |
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Turn right while L1 is pressed
while (true) {
if (Controller1.ButtonL1.pressing()) {
Drivetrain.turn(right);
} else {
Drivetrain.stop();
}
wait(5, msec);
}
}
.position#
.position returns the position of the joystick’s specified axis as an integer from —100 to 100, representing a percentage. This method must be called on a specific axis object, such as Axis1 (see full list of axis objects below).
Uso:
Se puede utilizar uno de los cuatro ejes disponibles con este método, como se muestra a continuación:

Eje |
Dominio |
|---|---|
|
|
|
|
|
|
|
|
Parámetros |
Descripción |
|---|---|
Este método no tiene parámetros. |
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Turn with the left joystick
RemoteControlCodeEnabled = false;
while (true) {
if (Controller1.Axis4.position() > 10) {
Drivetrain.turn(right);
} else if (Controller1.Axis4.position() < -10) {
Drivetrain.turn(left);
} else {
Drivetrain.stop();
}
wait(20, msec);
}
}
column#
column returns the current column where text will be printed as an integer.
Uso:
Controller.Screen.column()
Parámetros |
Descripción |
|---|---|
Este método no tiene parámetros. |
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Clear screen
Controller1.Screen.clearScreen();
// Print the column number on row 2, column 3.
Controller1.Screen.setCursor(2, 3);
Controller1.Screen.print(Controller1.Screen.column());
}
row#
row returns the current row where text will be printed as an integer.
Uso:
Controller.Screen.row()
Parámetros |
Descripción |
|---|---|
Este método no tiene parámetros. |
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Clear screen
Controller1.Screen.clearScreen();
// Print the column number on row 2, column 3.
Controller1.Screen.setCursor(2, 3);
Controller1.Screen.print(Controller1.Screen.row());
}
Llamar de vuelta#
.pressed#
.pressed registers a callback function that runs when a specific button on the controller is pressed. This method must be called on a specific button object, such as ButtonDown — (see full list of button objects below).
Uso:
Se puede utilizar uno de los objetos de botón disponibles con este método, como se muestra a continuación:
Botón |
Dominio |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Parámetros |
Descripción |
|---|---|
|
Una función de devolución de llamada previamente definida que se llama automáticamente cuando cambia el valor del eje. La función debe coincidir con la firma de devolución de llamada requerida. Consulte Funciones de devolución de llamada para obtener más información. |
Callback Signature:
void callback();
Argumentos |
Descripción |
|---|---|
Esta función de devolución de llamada no tiene argumentos. |
// Drive forward when A is pressed
void driveForward() {
Drivetrain.driveFor(forward, 100, mm);
}
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Call driveForward when the A button is pressed
Controller1.ButtonA.pressed(driveForward);
}
.released#
.released registers a callback function that runs when a specific button on the controller is released. This method must be called on a specific button object, such as ButtonDown — (see full list of button objects below).
Uso:
Se puede utilizar uno de los objetos de botón disponibles con este método, como se muestra a continuación:
Botón |
Dominio |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Parámetros |
Descripción |
|---|---|
|
Una función de devolución de llamada previamente definida que se llama automáticamente cuando cambia el valor del eje. La función debe coincidir con la firma de devolución de llamada requerida. Consulte Funciones de devolución de llamada para obtener más información. |
Callback Signature:
void callback();
Argumentos |
Descripción |
|---|---|
Esta función de devolución de llamada no tiene argumentos. |
// Drive backward when A is released
void backUp() {
Drivetrain.driveFor(reverse, 100, mm);
}
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Call backUp when the A button is released
Controller1.ButtonA.released(backUp);
}
.changed#
.changed registers a callback function that runs when the joystick’s position changes. This method must be called on a specific axis object, such as Axis1 (see full list of axis objects below).
Uso:
Se puede utilizar uno de los cuatro ejes disponibles con este método, como se muestra a continuación:
Eje |
Dominio |
|---|---|
|
|
|
|
|
|
|
|
Parámetros |
Descripción |
|---|---|
|
Una función de devolución de llamada previamente definida que se llama automáticamente cuando cambia el valor del eje. La función debe coincidir con la firma de devolución de llamada requerida. Consulte Funciones de devolución de llamada para obtener más información. |
Callback Signature:
void callback();
Argumentos |
Descripción |
|---|---|
Esta función de devolución de llamada no tiene argumentos. |
// Play a rumble pattern when the left joystick moves
void rumblePattern() {
Controller1.rumble("..--");
wait(1, seconds);
}
int main() {
// Initializing Robot Configuration. DO NOT REMOVE!
vexcodeInit();
// Call the rumble function when the left joystick moves
Controller1.Axis4.changed(rumblePattern);
}
Constructores#
Constructors are used to manually create controller objects, which are necessary for configuring a controller outside of VEXcode. You can only create two controllers in a project.
controller#
controller creates a controller.
Usage:
controller Controller = controller(controller_type);
Parámetros |
Descripción |
|---|---|
|
The type of controller to create.
|
// Create a controller
controller Controller = controller(primary);
// Create two controllers
controller Controller1 = controller(primary);
controller Controller2 = controller(partner);