Optical Sensor#
Introduction#
The V5 Optical Sensor detects the color, brightness, and presence of nearby objects using a combination of an RGB color sensor and proximity sensor. It can also use its built-in LED to illuminate objects for more accurate detection.

Below is a list of available blocks:
set Optical light – Turns the Optical Sensor’s LED on or off.
set Optical light power – Sets the power level of the Optical Sensor’s LED.
Optical found an object – Reports whether the sensor is detecting an object within range.
Optical detects color – Reports whether the Optical Sensor detects a specified color.
Optical brightness – Reports the brightness detected by the Optical Sensor.
Optical hue – Reports the hue detected by the Optical Sensor.
when Optical – Runs the attached stack of blocks when the Optical Sensor detects or loses an object.
set Optical light#
The set Optical light stack block turns the Optical Sensor’s LED on or off. This can help increase the sensor’s accuracy when detecting colors.
set [Optical1 v] light [on v]
Parameters |
Description |
|---|---|
device |
Which Optical Sensor to use, configured in the Devices window. |
state |
The state of the Optical Sensor’s light: on or off. |
when started
[Turn on the sensor's LED.]
set [Optical1 v] light [on v]
set Optical light power#
The set Optical light power stack block sets the brightness of the Optical Sensor’s LED. The light can help the Optical Sensor detect objects and colors more clearly.
A higher percentage makes the light brighter. A lower percentage makes the light dimmer.
If the Optical Sensor’s light is off, setting the light power above 0% will turn the light on.
If the Optical Sensor’s light is on, setting the light power at 0% will turn the light off.
set [Optical1 v] light power to [50] %
Parameters |
Description |
|---|---|
device |
Which Optical Sensor to use, configured in the Devices window. |
brightness |
The brightness to set the Optical Sensor’s light to, from 0% to 100%. Use whole numbers. |
when started
[Turn on the sensor's LED at half brightness.]
set [Optical1 v] light power to [50] %
Optical found an object#
The Optical found an object Boolean block reports whether or not the Optical Sensor detects an object within range.
True — The Optical Sensor detects an object.
False — The Optical Sensor does not detect an object.
<[Optical1 v] found an object?>
Parameters |
Description |
|---|---|
device |
Which Optical Sensor to use, configured in the Devices window. |
Example
when started
[Drive forward until an object is found.]
drive [forward v]
wait until <[Optical1 v] found an object?>
stop driving
Optical detects color#
The Optical detects color Boolean block reports whether the Optical Sensor detects a specified color, based on the detected hue value.
True – The sensor detects the specified color.
False – The sensor does not detect the specified color.
Note: The Optical Sensor is looking for hue ranges that match the specified color. For detecting specific hue ranges, see the Optical hue reporter block.
<[Optical1 v] detects [red v]?>
Parameters |
Description |
|---|---|
device |
Which Optical Sensor to use, configured in the Devices window. |
color |
Which color to look for:
|
Example
when started
[Drive forward until red is found.]
drive [forward v]
wait until <[Optical1 v] detects [red v]?>
stop driving
Optical brightness#
The Optical brightness reporter block reports how much light is reflected back to the Optical Sensor, as a percentage from 0% to 100%.
A higher percentage means more light is reflected back to the Optical Sensor. A lower percentage means less light is reflected back.
([Optical1 v] brightness in %)
Parameters |
Description |
|---|---|
device |
Which Optical Sensor to use, configured in the Devices window. |
Optical hue#
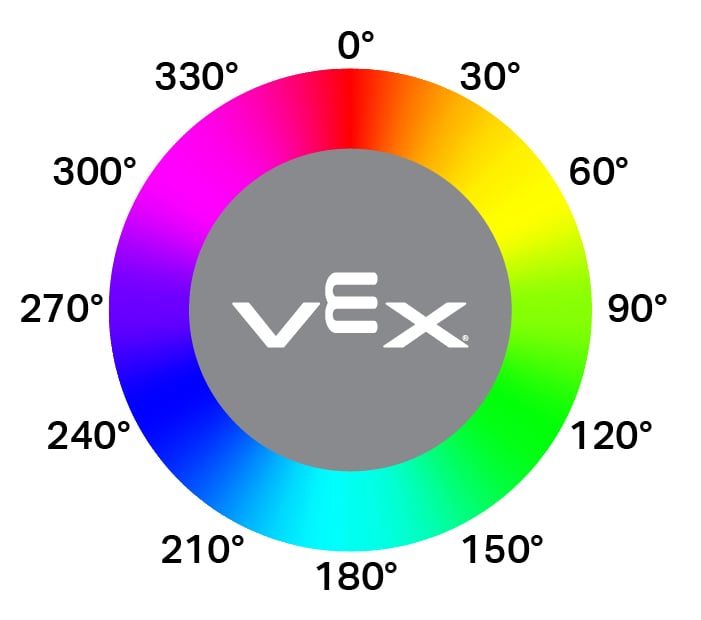
The Optical hue reporter block reports the hue detected by the Optical Sensor as a number from 0 to 359 degrees.
Hue is a way to describe color using numbers around a color wheel.
([Optical1 v] hue in degrees)
Parameters |
Description |
|---|---|
device |
Which Optical Sensor to use, configured in the Devices window. |
Example
when started
[Look for the color pink using hue.]
forever
clear screen
set cursor to row [1] column [1] on screen
if <[300] [math_less_than v] ([Optical1 v] hue in degrees) [math_less_than v] [359]> then
print [This is pink!] on screen ▶
else
print [No pink detected!] on screen ▶
when Optical#
The when Optical hat block runs the attached stack of blocks whenever the Optical Sensor detects or loses an object.
when [Optical1 v] [detects v] an object :: hat events
Parameters |
Description |
|---|---|
device |
Which Optical Sensor to use, configured in the Devices window. |
state |
When the attached stack of blocks will run: detects runs when an undetected object is detected, while loses runs when a detected object is now no longer detected. |