Robot Details#
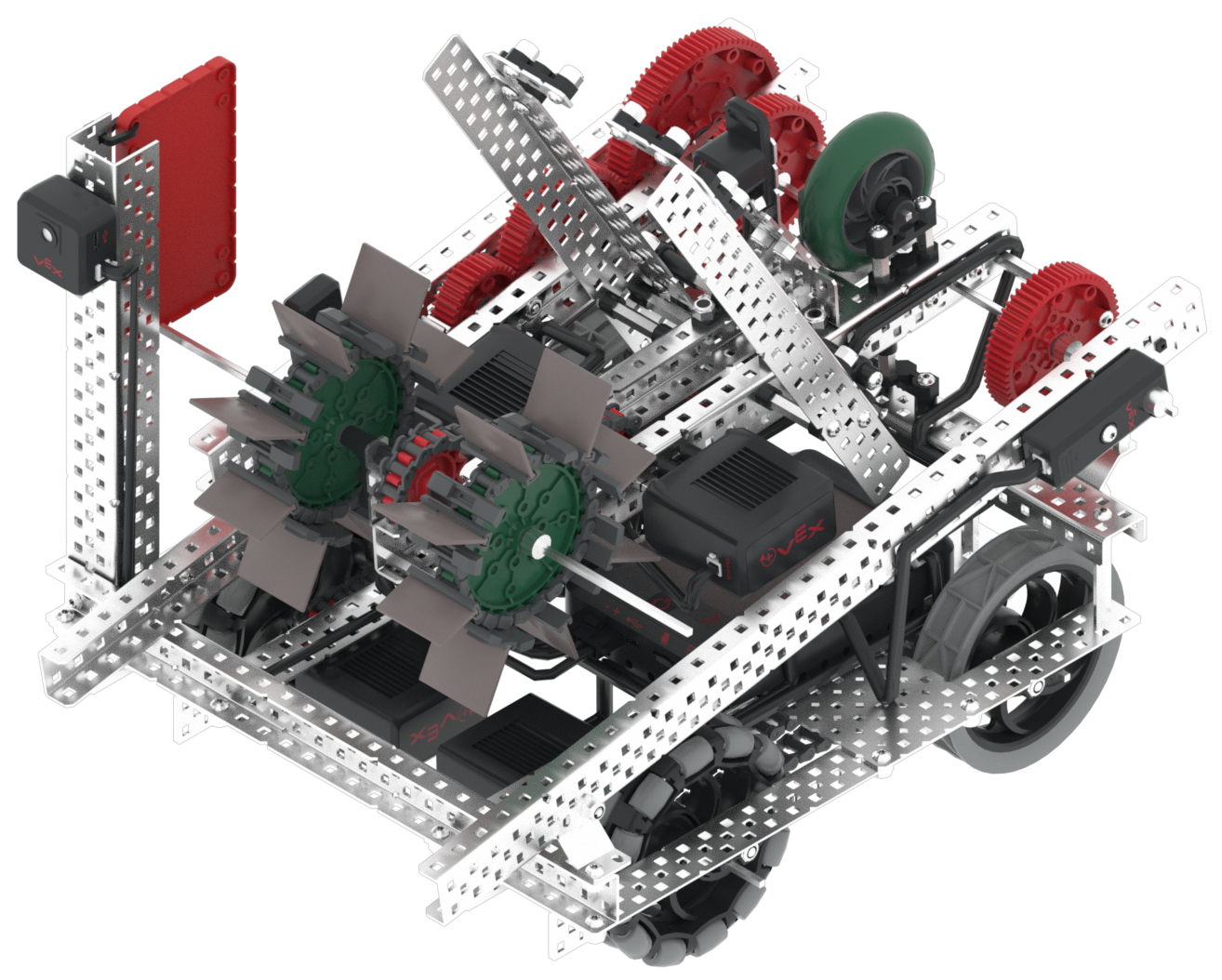
The V5RC Virtual Skills - Over Under Playground uses the standard VEX V5 Hero Bot, Striker.
The Striker VEX V5 Hero Bot measures approximately 350 millimeters long and 280 millimeters wide.
Motor Groups#
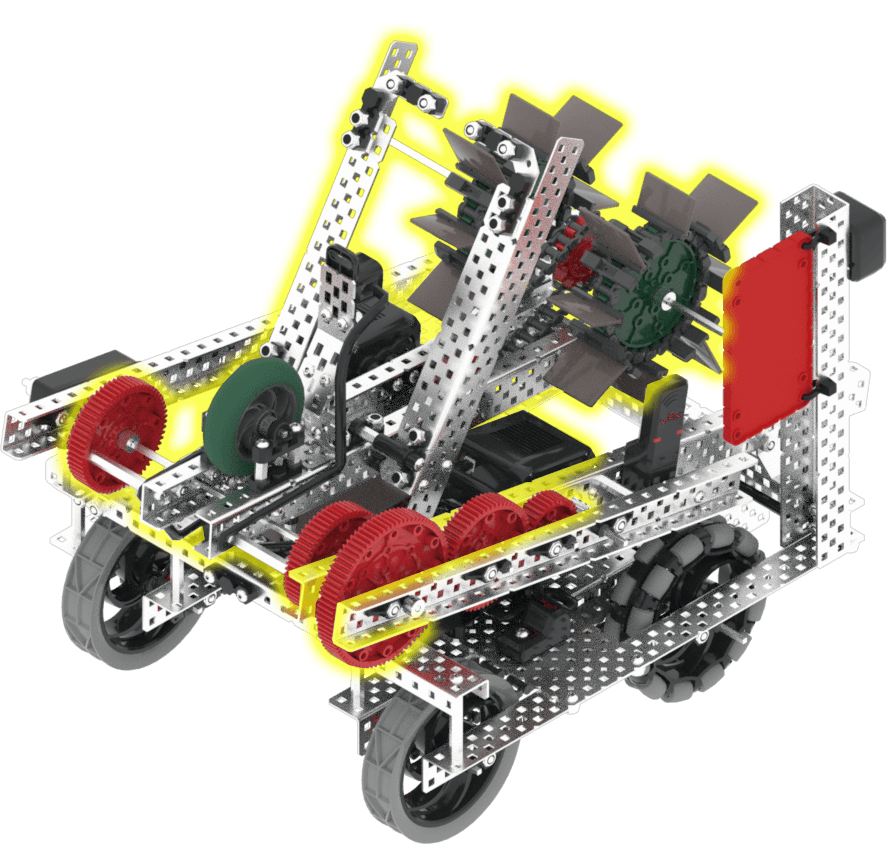
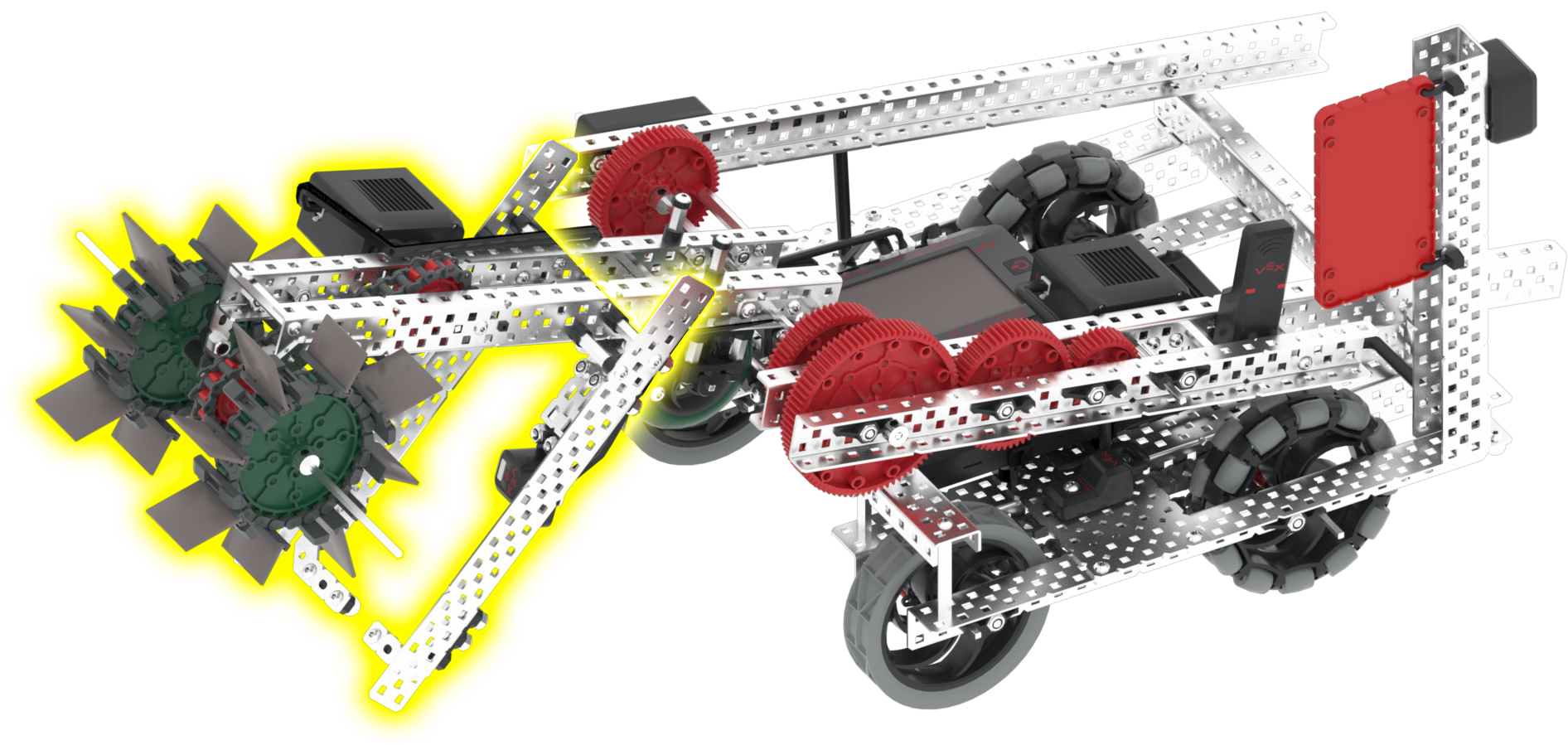
Striker is equipped with two sets of Motor Groups for its Arm and Intake.
Configuration & |
Description |
API Documentation |
|---|---|---|
|
The Arm can be raised and lowered. This allows the robot to do things like transport game objects. By default, the Arm starts at 0 degrees and Arm will be fully lowered when spun forward for 1200 degrees. |
|
|
The Intake can be spun forward and in reverse. This allows the robot to collect and score game objects. The Intake will collect a Triball when spun forward 360 degrees and score or drop a Triball when spun in reverse for 360 degrees. |
Sensors#
Striker has access to the following sensors for autonomous coding:
Configuration |
Description |
API Documentation |
Python Command Name |
|---|---|---|---|
Brain Timer |
The Robot has access to a built-in timer. |
|
|
Drivetrain |
The Robot has access to a Drivetrain with a built-in Inertial Sensor to track the Robot’s current heading and angle of rotation. |
|
|
Optical |
Reports if an object is close to the sensor, and if so, what color that object is. |
|
|
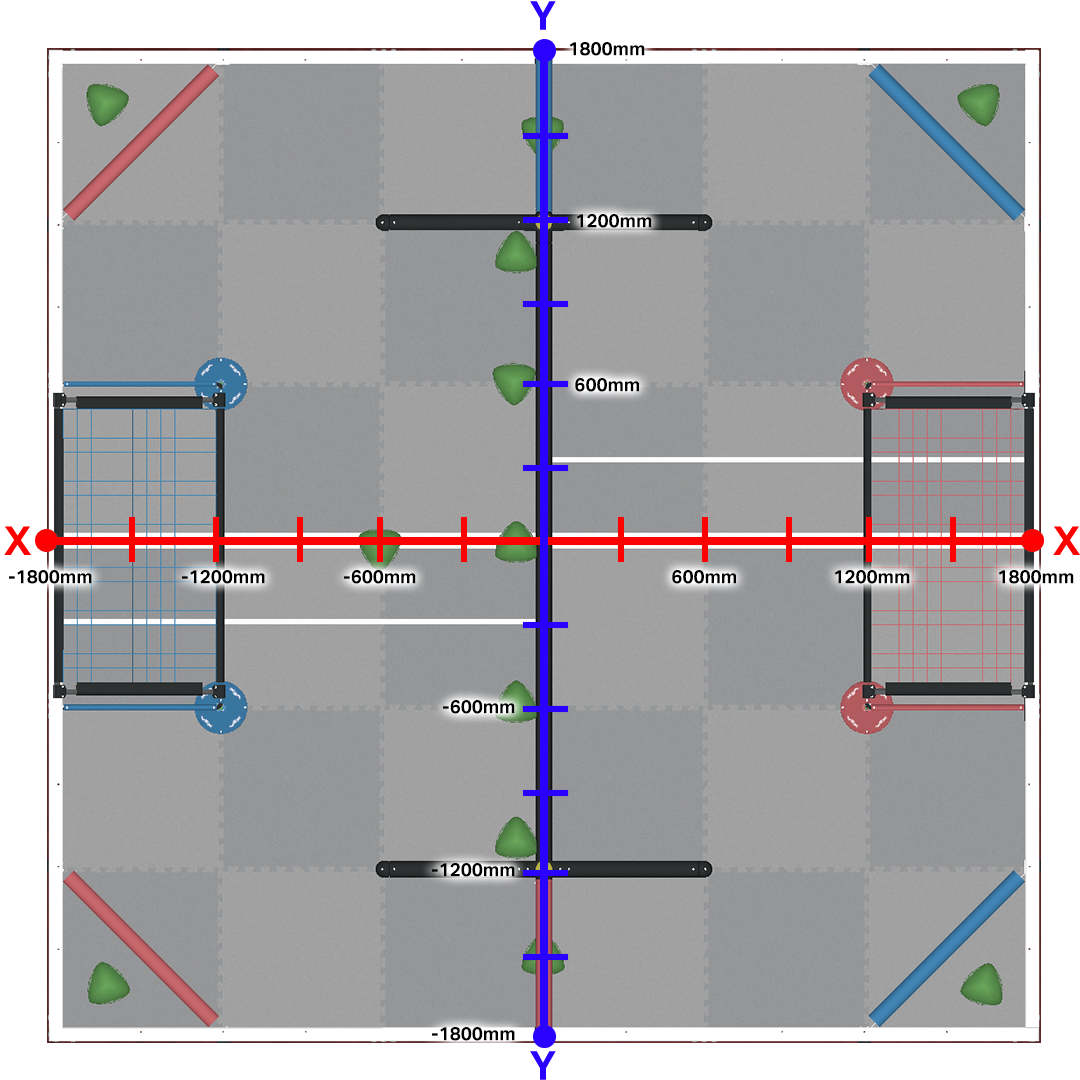
GPS |
Reports the current X and Y position of the center of rotation of Striker in millimeters or inches. The GPS Sensor can also report the current heading in degrees. |
|
The GPS sensor relies on the Cartesian Coordinate system to navigate, with the middle of the field being (0, 0).