机器人专用积木#
VR Rover 可以访问标准 VR 传动系统、事件、控制、操作员、变量、我的块和评论块。
传动系统#
Go to object#
前往物体块用于转动并驱动 VR 探测车面向指定物体。
这可以是非等待或等待块,取决于是否使用并且不等待选项。
前往 [minerals v] %2
选择 VR 探测车要前往的物体。可以是矿物、敌人或基地。
前往 [minerals v] %2
如果 VR Rover 检测到多种矿物或多个敌人,它将移动到更近的选项。
默认情况下,前往物体积木块会阻止所有后续积木块的执行,直到其完成为止。通过展开前往物体积木块以显示不等待,积木块将在 VR 探测车移动时继续执行。
前往 [minerals v] %2 ◀ 并且不等待
在这个例子中,VR Rover 将转弯并行驶到最近的矿物。
当开始
前往 [minerals v] %2
行动#
Minerals action#
矿物动作块用于与流浪者救援游乐场中的矿物进行互动。
这是一个非等待块,允许任何后续块无延迟地执行。
矿物质 [捡起 v]
选择 VR Rover 如何处理矿物。
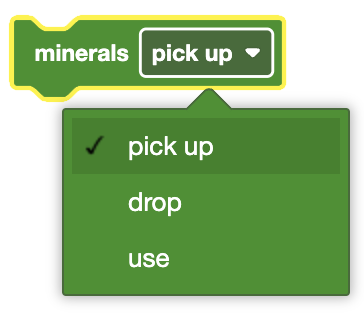
拾取矿物后,这些矿物将被放入VR探测车的储存器中。它会一直被携带,直到项目使用带有“使用”或“丢弃”标记的矿物操作块为止。
使用矿物可以补充 VR 探测车的部分能量,具体数值可通过“游戏场”窗口中的电池图标显示。矿物必须位于地面上才能使用。
VR 探测车将通过使用矿物或在基地投放矿物来获得经验值 (XP)。
在这个例子中,VR Rover 将转向并行驶到最近的矿物,然后将其拾起。
当开始
前往 [minerals v] %2
矿物质 [捡起 v]
Absorb enemy radiation#
吸收敌人辐射块用于与流浪者救援游乐场中的敌人互动。
这是一个非等待块,允许任何后续块无延迟地执行。
吸收辐射
在这个例子中,VR Rover 将转向并驶向最近的敌人,然后吸收一次敌人的辐射。
当开始
前往 [enemy v] %2
吸收辐射
Standby#
待机块用于将 VR Rover 置于待机模式,直到达到指定的电池阈值。
这是一个等待块,在它完成之前不会允许任何后续块执行。
standby until [50] % battery
待机状态下,VR Rover 的电池消耗速度会较慢,但生存天数计数器会以更高的速率增加。
一旦达到电池电量阈值,VR Rover 将退出待机状态,重新消耗电池并以正常速率增加生存天数计数器。
选择 VR Rover 退出待机模式的电池阈值。
standby until [50] % battery
在这个例子中,VR Rover 将进入待机模式,等待电池电量达到 35% 后再转向并移动到最近的矿物。
当开始
standby until [35] % battery
前往 [minerals v] %2
外观#
VR Rover 无法访问 VR Pen,但它仍然可以打印到其监视器控制台。
活动#
When under attack#
当 VR 探测车受到敌人攻击时,使用 受到攻击时 块来运行附加的块堆栈。
当遭到攻击时
在这个例子中,VR Rover 在受到攻击时会吸收一次最近敌人的辐射。
当遭到攻击时
吸收辐射
When level up#
每次 VR 探测车从一个级别移动到另一个级别时,当级别上升时块用于运行附加的块堆栈。
当等级升高
在此示例中,VR Rover 在升级时会向打印控制台打印一条消息。
当等级升高
打印 [The VR Rover has leveled up!] ◀ 并设定光标为下一行
传感#
VR Rover 可以使用标准大脑、传动系统和距离感应模块。
Rover sees#
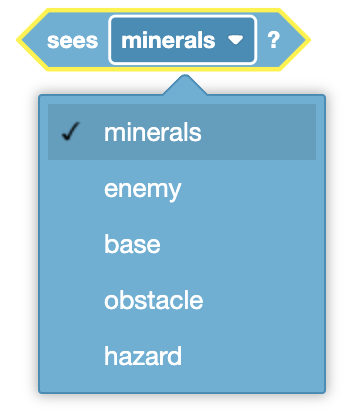
Rover 看到 块用于报告 VR Rover 是否使用内置 AI 技术看到可检测物体。
<看到 [minerals v]?>
选择是否报告 VR Rovers 内置 AI 发现矿物、敌人、基地、障碍物或危险的情况。
VR 探测车的视野为 40 度。这可以在游乐场的迷你地图上看到,VR 探测车前方的灰色半透明锥体表示该视野。
The Rover sees block reports True when the selected option is less than 1000 millimeters (MM) away from the VR Rover and within its field of view.
The Rover sees block reports False when the selected option is greater than 1000 millimeters (MM) away from the VR Rover and/or not within its field of view.
Rover sees 块用于具有六边形(六面)空间的块中。
在这个例子中,VR 机器人会不断检查是否看到任何矿物,然后再转向并向它们移动。
当开始
永久循环
如果 <看到 [minerals v]?> 那么
前往 [minerals v] %2
结束
结束
Rover detects#
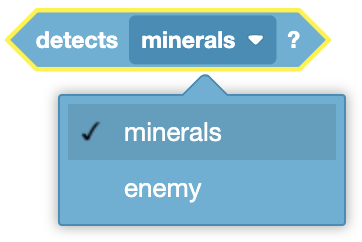
Rover 检测 模块用于报告 VR Rover 是否使用内置 AI 技术检测到敌人或矿物。
<检测 [minerals v]?>
选择是否报告 VR Rovers 内置 AI 检测到矿物或敌人的情况。
VR 探测车的探测半径为 800 毫米 (MM)。您可以在游乐场的迷你地图上看到 VR 探测车周围的黄色圆圈。
The Rover detects block reports True when the VR Rover detects the selected option.
The Rover detects block reports False when the selected option is not within the detect radius of the VR Rover.
流动站检测块用于具有六边形(六面)空间的块中。
在这个例子中,VR 机器人会在转向并向矿物移动之前不断检查是否检测到任何矿物。
当开始
永久循环
如果 <检测 [minerals v]?> 那么
前往 [minerals v] %2
结束
结束
Minerals in storage#
储存的矿物块用于报告 VR 探测车当前储存的矿物数量。
(储存中的矿物质)
储存矿物块用于具有圆形空间的块中。
在这个例子中,VR Rover 将打印它当前存储的矿物数量。
当开始
打印 (储存中的矿物质) ◀ 并设定光标为下一行
Storage capacity#
存储容量块用于报告VR Rover存储的承载能力。
(存储容量)
存储容量块用于具有圆形空间的块中。
在这个例子中,VR Rover 将打印其当前的承载能力。
当开始
打印 (存储容量) ◀ 并设定光标为下一行
Rover direction#
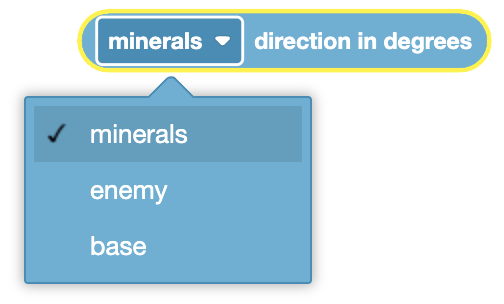
探测车方向块用于使用内置 AI 技术以度为单位报告 VR 探测车到矿物、敌人或基地的方向。
([minerals v] 方向(度))
选择是否报告矿物、敌人或基地的方向。
探测车方向方块仅在敌人或矿物距离 VR 探测车小于 1000 毫米 (mm) 且在其 40 度视野范围内时才会生效。这可以在操场上的小地图上看到,VR 探测车前方的灰色半透明锥体指示了这一点。
如果为该区块选择了“基座”,即使 VR 探测车的基座不在视野范围内,也会报告距离。VR 探测车的 AI 技术使其能够始终检测基座。此区块在向基座报告方向时,将报告 -180 度到 180 度之间的值。
流动站方向块用于具有圆形空间的块中。
在这个例子中,VR Rover 将打印从 VR Rover 到最近矿物的当前方向。
当开始
打印 ([minerals v] 方向(度)) ◀ 并设定光标为下一行
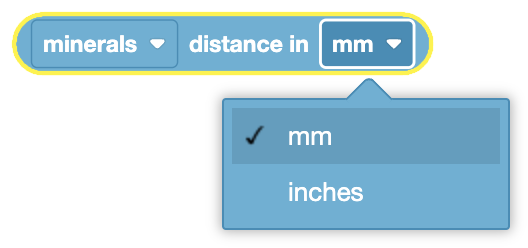
Rover distance#
Rover distance 模块用于使用内置 AI 技术报告 VR Rover 到矿物、敌人、障碍物、危险或基地的距离。
([minerals v] 距离 [毫米 v] :: custom-actions)
选择是否报告矿物、敌人、障碍物、危险或基地的距离。
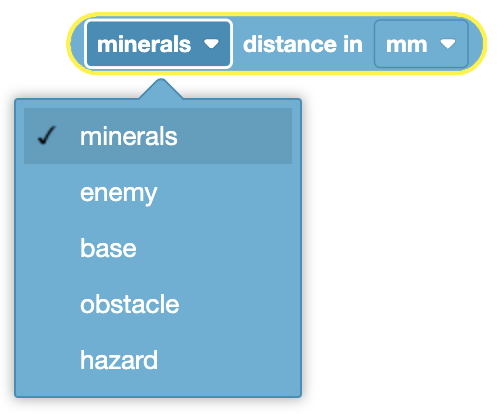
选择以毫米还是英寸为单位报告距离。
探测车距离模块仅在敌人或矿物距离 VR 探测车小于 1000 毫米 (mm) 且在其 40 度视野范围内时才会生效。这可以在操场上的小地图上看到,VR 探测车前方的灰色半透明锥体表示该距离。
如果选择“基站”作为区块,即使 VR 探测车的基站不在视野范围内,系统也会报告距离。VR 探测车的 AI 技术使其能够始终检测基站。
流动距离块用于具有圆形空间的块中。
在这个例子中,VR Rover 将打印 VR Rover 到最近矿物的当前距离(以毫米为单位)。
当开始
打印 ([minerals v] 距离 [毫米 v] :: custom-actions) ◀ 并设定光标为下一行
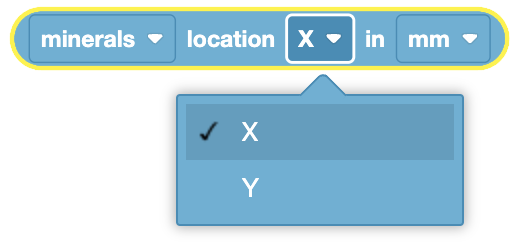
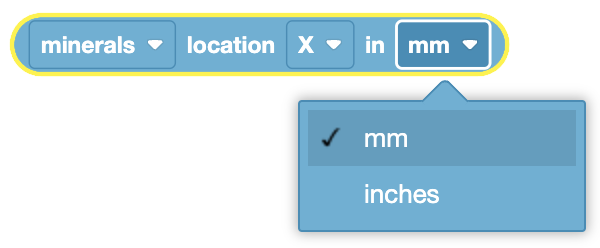
Rover location#
Rover 位置块用于使用 VR Rover 内置的 AI 技术报告矿物、敌人、障碍物、危险或基地的 X 或 Y 坐标位置。
([minerals v] 在 [X v] 上位置 [毫米 v])
选择是否报告矿物、敌人、障碍物、危险或基地的坐标位置。
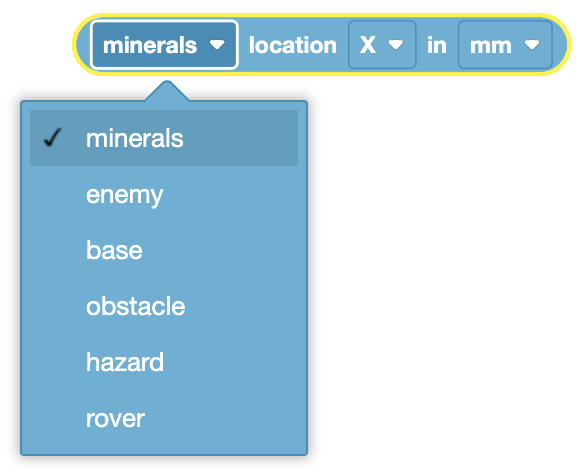
选择是否返回 X 或 Y 坐标。
选择以毫米还是英寸为单位报告坐标位置。
探测车位置方块仅在敌人或矿物距离 VR 探测车小于 1000 毫米 (mm) 且在其 40 度视野范围内时才会生效。这可以在操场上的小地图上看到,VR 探测车前方的灰色半透明锥体表示该位置。
如果区块选择“基站”,即使 VR 探测车的基站不在视野范围内,也会报告位置。VR 探测车的 AI 技术使其能够始终检测基站。
流动站位置块用于具有圆形空间的块中。
在此示例中,VR Rover 将以毫米为单位打印底座的 X 和 Y 坐标。
当开始
打印 ([base v] 在 [X v] 上位置 [毫米 v]) ◀ 并设定光标为下一行
打印 ([base v] 在 [Y v] 上位置 [毫米 v]) ◀ 并设定光标为下一行
Under attack#
受到攻击块用于报告 VR 探测车是否受到敌人的攻击。
<遭到攻击?>
The Under attack block reports True when the VR Rover is under attack from an enemy.
The Under attack block reports False when the VR Rover is not under attack from an enemy.
受到攻击块用于具有六边形(六面)空间的块中。
在这个例子中,VR机器人会不断检查自己是否受到攻击,如果是,则向后移动500毫米。
当开始
永久循环
如果 <遭到攻击?> 那么
驱动 [反 v] [500] [毫米 v] ▶
结束
结束
Enemy level#
敌人等级块用于报告在 VR Rover 的视野中检测到的最近敌人的等级。
(敌方等级)
当 VR Rover 的视野范围内未检测到敌人时,敌人等级块返回 0。
敌人等级块用于具有圆形空间的块中。
在这个例子中,会不断检查最近的敌人是否是1级,如果敌人是1级,VR Rover就会接近敌人,否则就会向后移动500毫米。
当开始
永久循环
如果 <(敌方等级) [math_equal v] [1]> 那么
前往 [enemy v] %2
否则
驱动 [反 v] [500] [毫米 v] ▶
结束
结束
Enemy radiation#
敌人辐射块用于报告 VR 探测车视野中检测到的最近敌人的辐射。
(敌方辐射)
当 VR Rover 的视野范围内未检测到敌人时,敌人辐射块返回 0。
敌方辐射块用于具有圆形空间的块中。
在这个例子中,VR Rover 将打印最近敌人的当前辐射。
当开始
打印 (敌方辐射) ◀ 并设定光标为下一行
Battery level#
电池电量块用于以百分比形式报告 VR Rover 的当前电池电量。
(电池电量百分比 :: custom-actions)
电池电量块用于具有圆形空间的块中。
In this example, the VR Rover will print its current battery level.
当开始
打印 (电池电量百分比 :: custom-actions) ◀ 并设定光标为下一行
Level#
Level 块用于报告 VR Rover 的当前级别。
(等级)
Level 块用于具有圆形空间的块中。
In this example, the VR Rover will print its current level.
当开始
打印 (等级) ◀ 并设定光标为下一行
XP#
XP 块用于报告 VR Rover 当前拥有的经验值 (XP) 数量。
(经验值)
XP 块用于具有圆形空间的块中。
在这个例子中,VR Rover 将打印其当前拥有的经验值 (XP) 数量。
当开始
打印 (经验值) ◀ 并设定光标为下一行