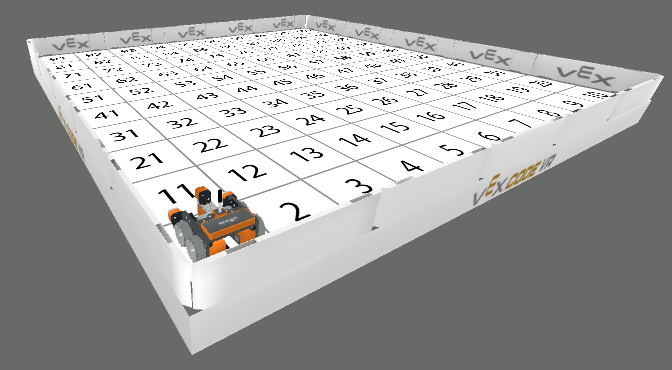
数字网格图# 数字网格地图是一个免费的游乐场,其目标是使用数字网格来练习计数、导航和移动 VR 机器人穿过编号为 1 到 100 的方格。 游乐场概览# 目标:使用编号网格练习计数、导航和移动 VR 机器人穿过编号为 1 到 100 的方格。 起始位置:(-900, -900) 地图尺寸:2000 x 2000 毫米 机器人概览# 数字网格地图使用标准VR机器人。