GPS坐标#
VEXcode VR 中的 GPS(游戏定位系统™)传感器提供 (X, Y) 坐标,用于在 V5RC 高风险游乐场中进行导航。它使用 VEX 场地代码(场地内部的棋盘格图案)来确定位置和航向。该传感器作为绝对定位系统运行,消除了漂移,无需每次场地校准。
GPS传感器如何工作#
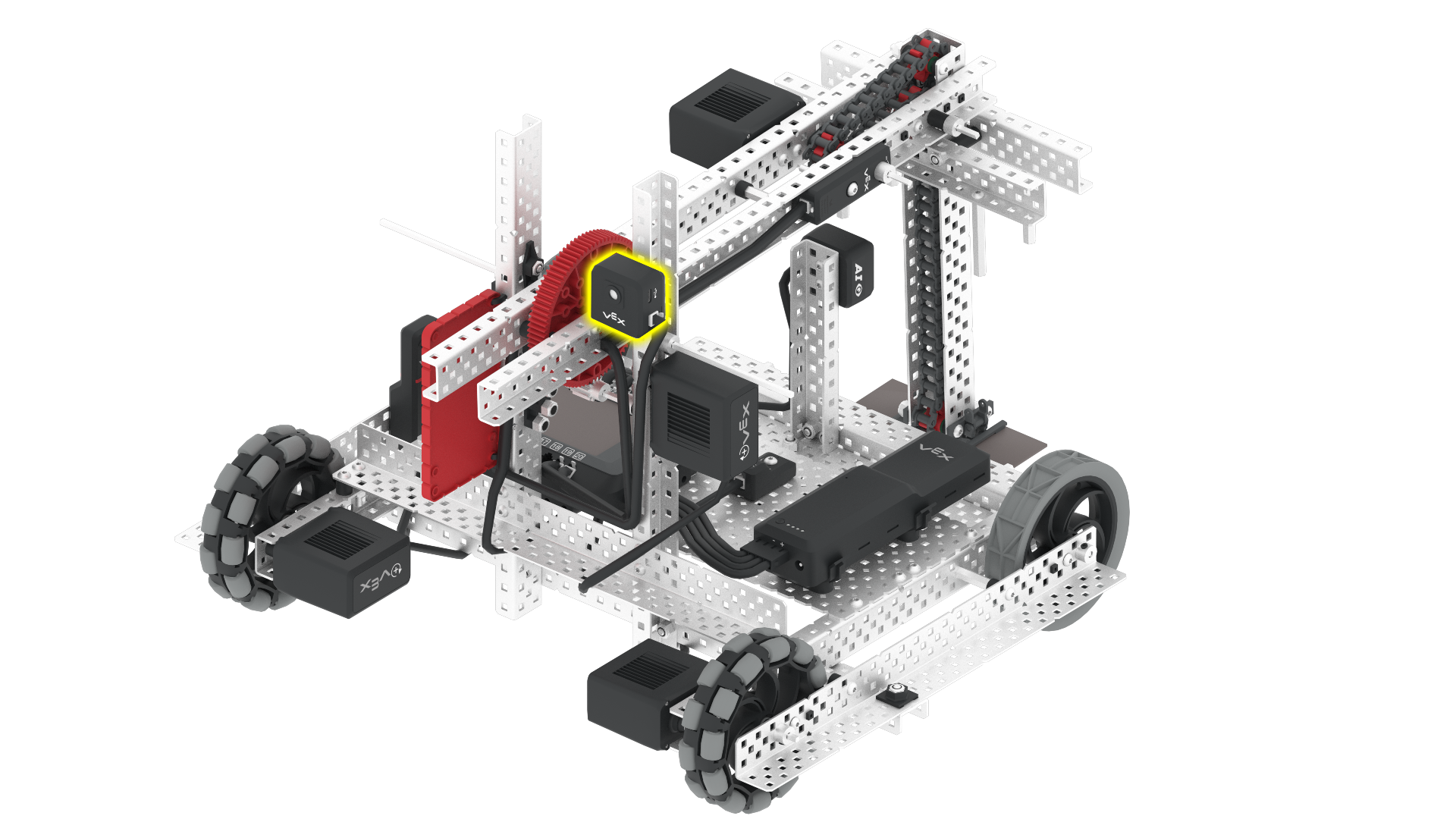
为了进行导航,GPS 传感器使用笛卡尔坐标系,场地中心指定为 (0, 0)。传感器本身是一个黑白摄像头,安装在机器人后部,面向后方,以便有效读取场地代码。
GPS 传感器以毫米或英寸为单位报告 Axel 旋转中心的 (X, Y) 坐标。这使得机器人能够在 VEXcode VR 环境中精确追踪其位置,从而在游戏或编程任务中实现精准的导航和定位。
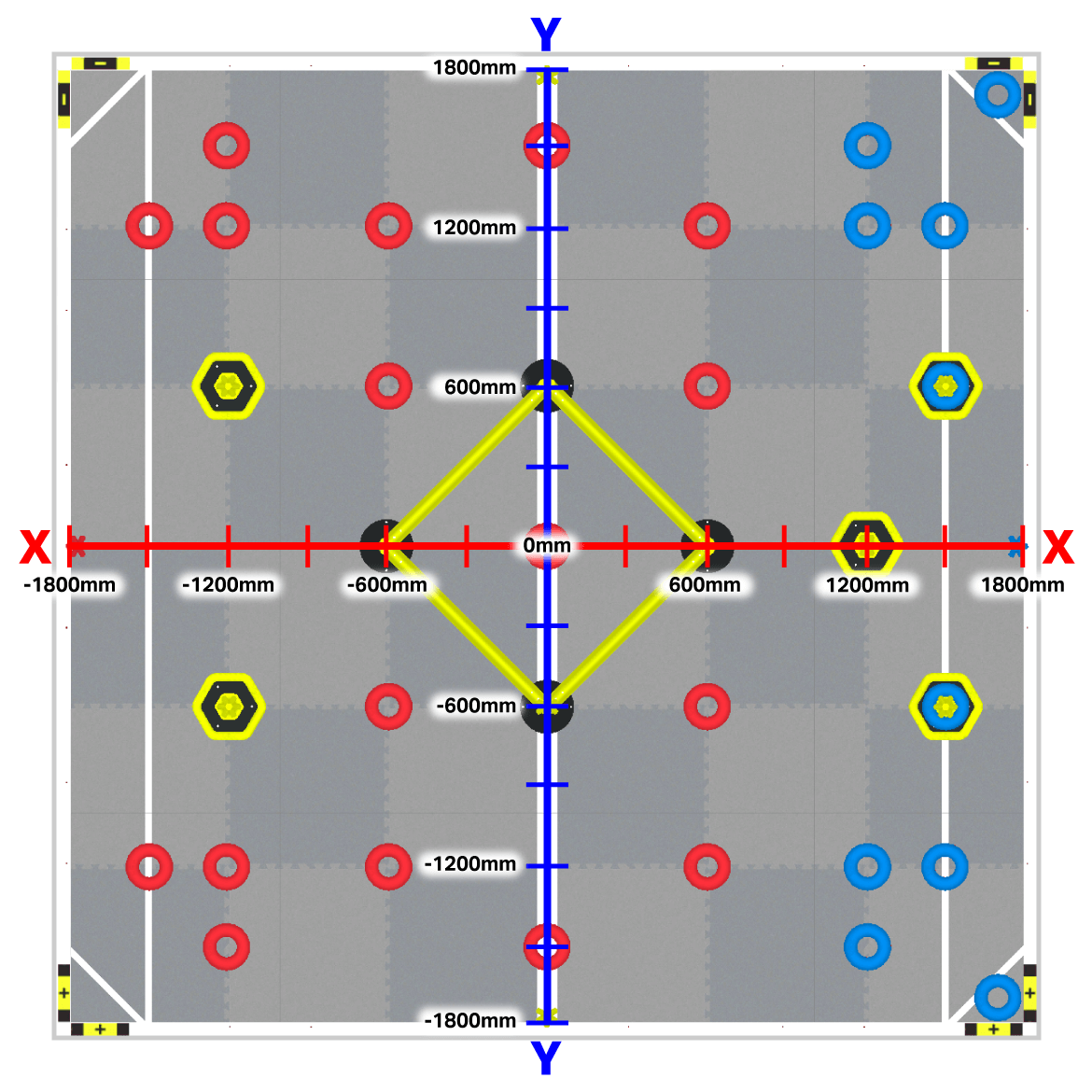
识别场地上的 (X, Y) 坐标#
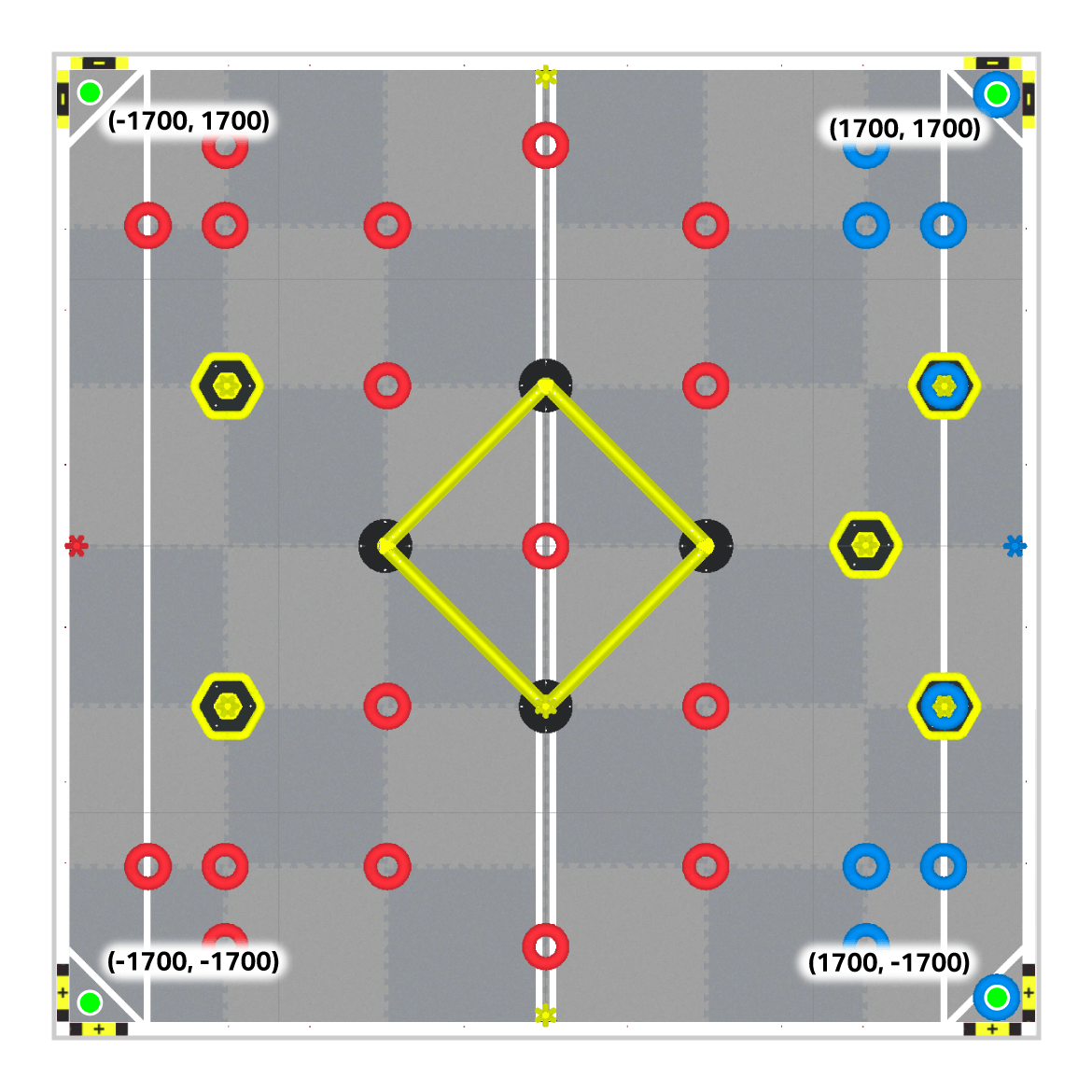
VEXcode VR 中的 V5RC 高风险球场 X 和 Y 轴位置的坐标范围约为 -1800 毫米至 1800 毫米。Axel 的起始位置取决于 所选起始位置。
中心位置或原点 (0,0) 位于场地的中心。
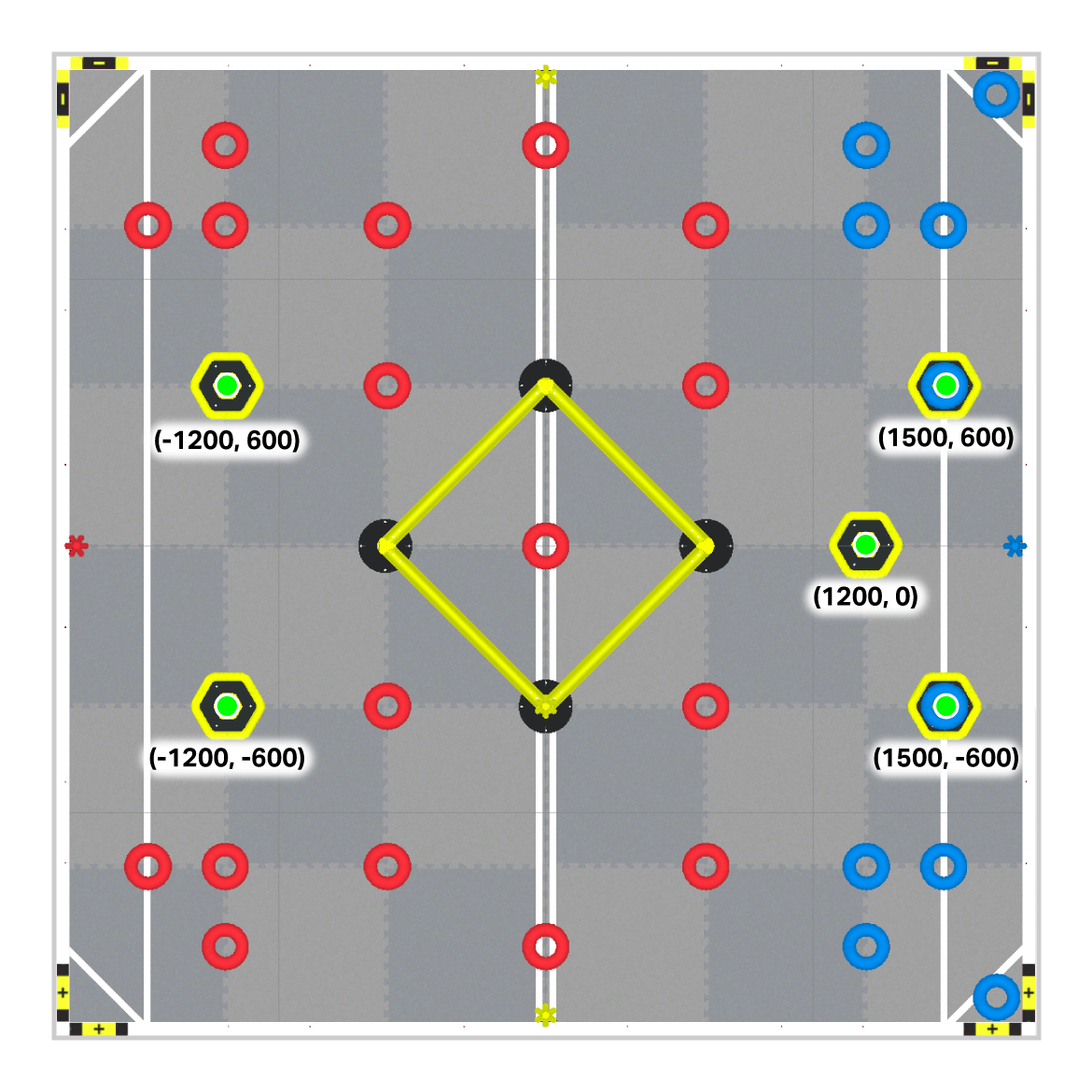
游戏元素的 (X, Y) 坐标#
Wall Stakes#
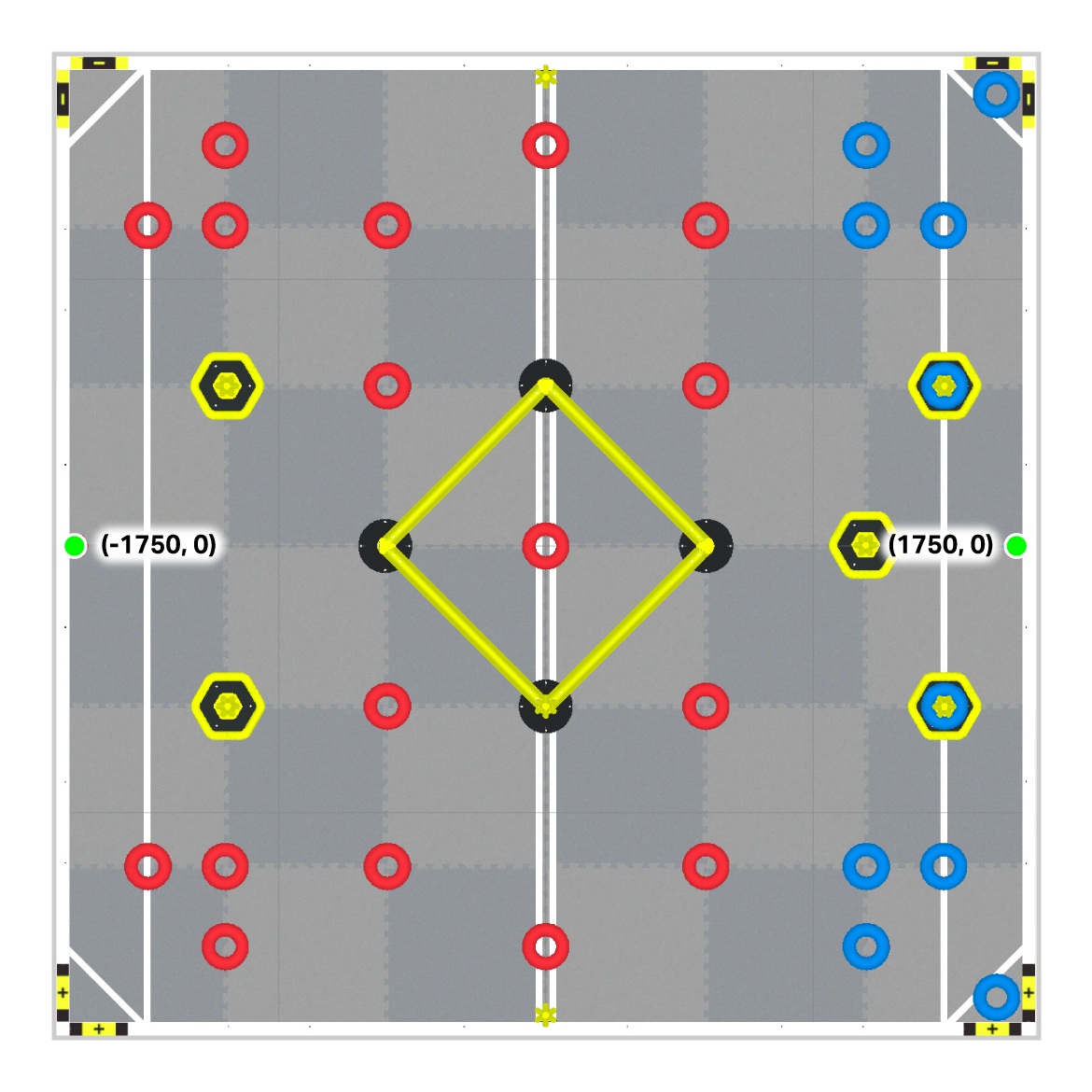
Field Corners#
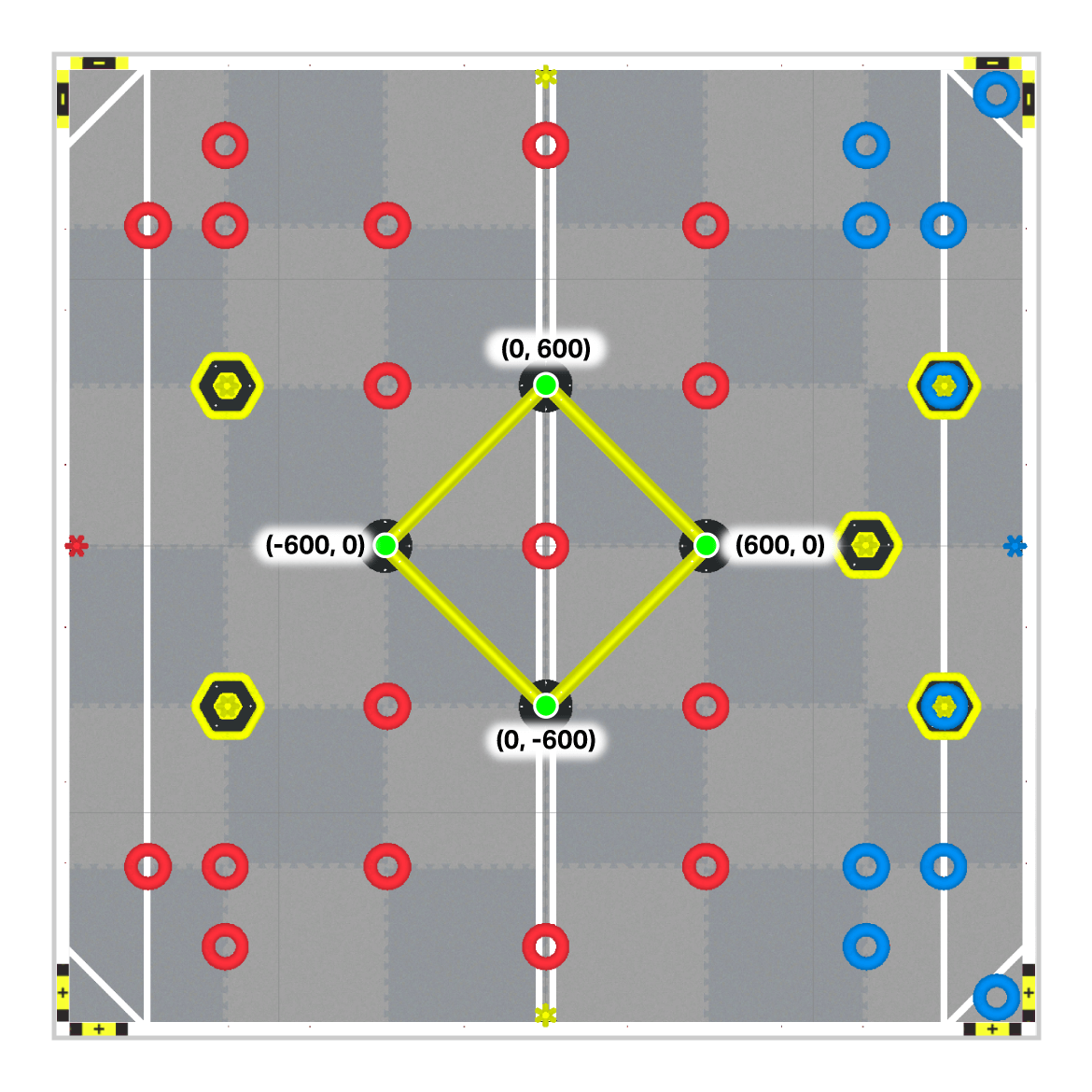
Ladder Posts#
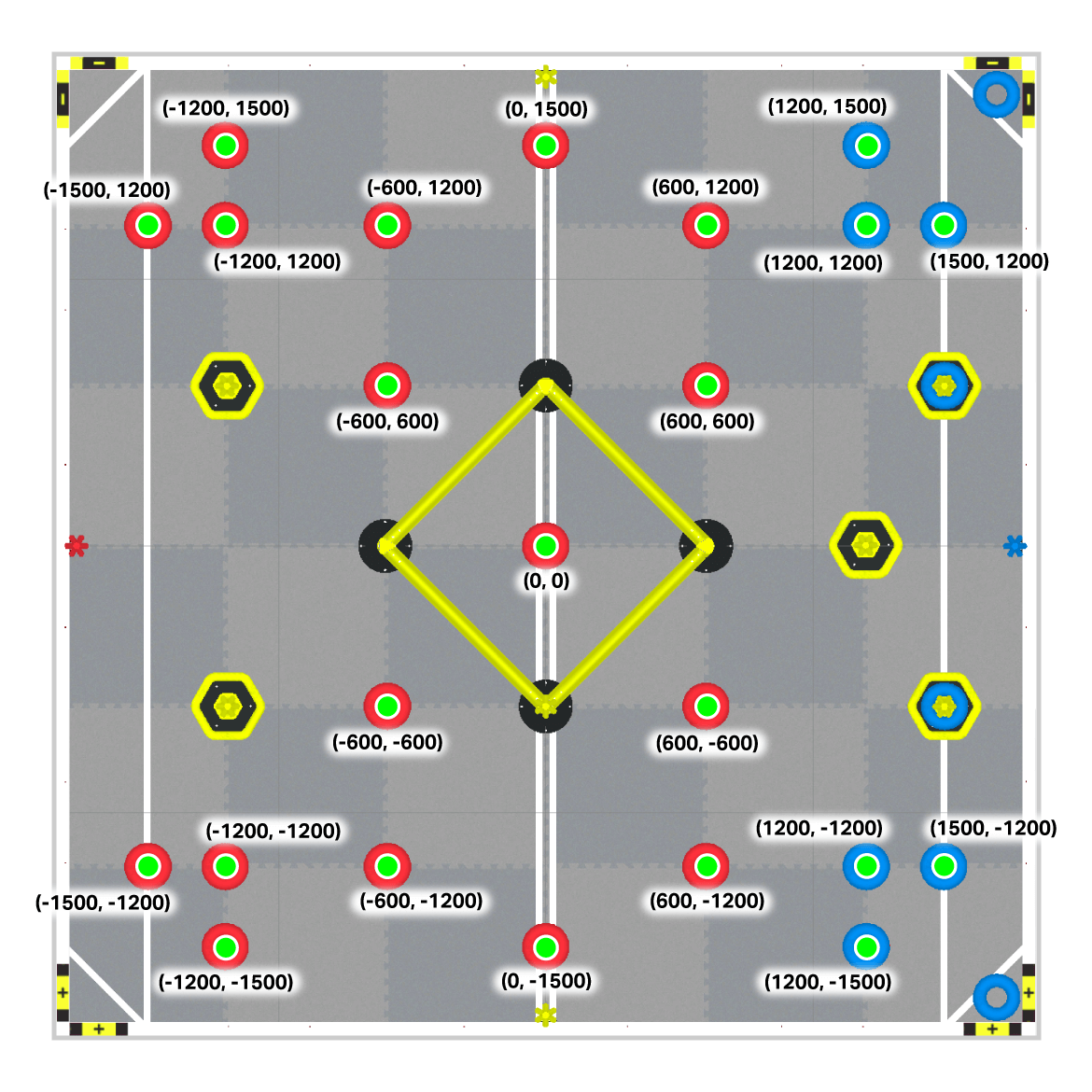
Red Rings#
这张地图显示场地上有23个红环。第24个红环在项目开始时已预先加载到Axel上。
Blue Rings#
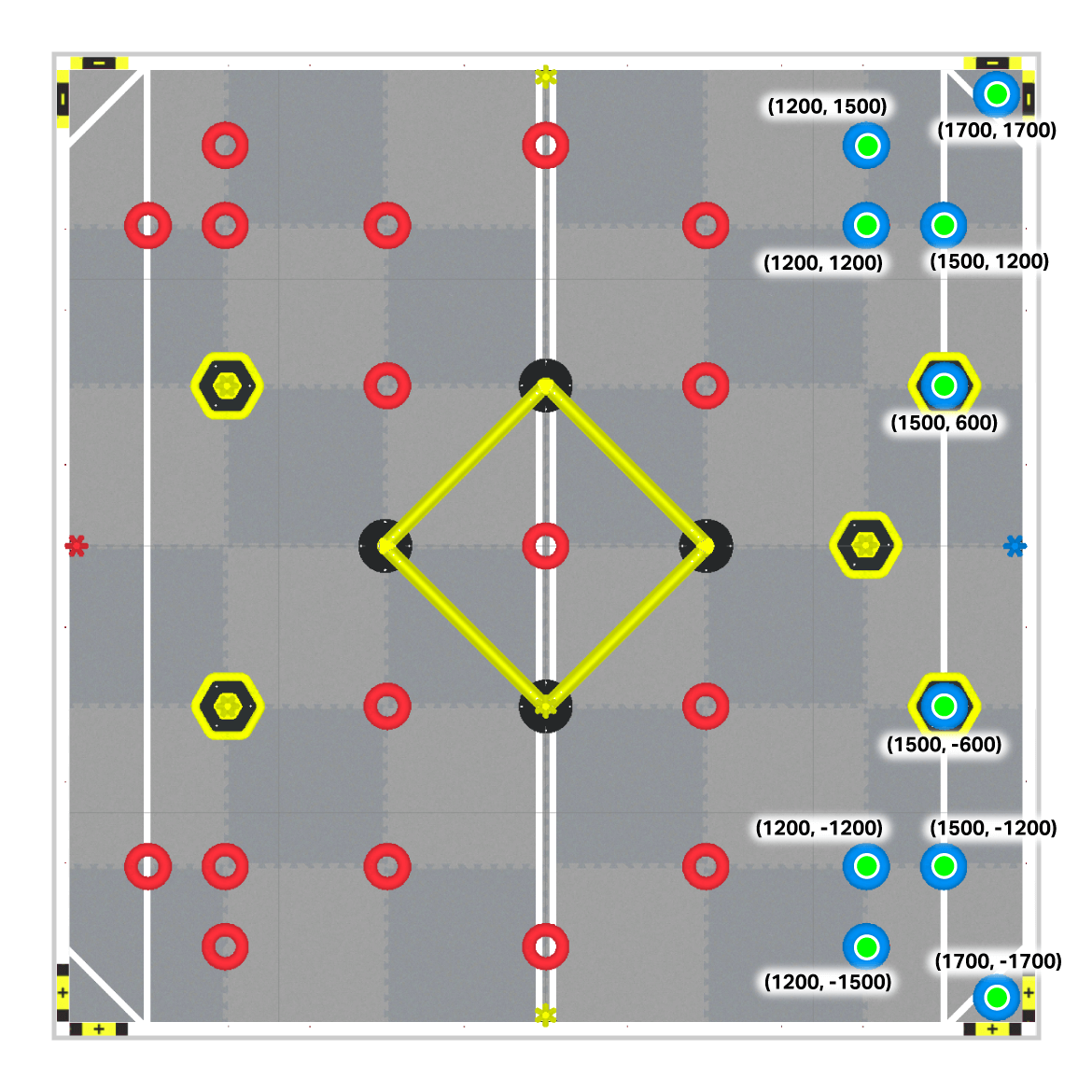
Mobile Goals#