Coordenadas GPS#
El sensor GPS (Sistema de Posicionamiento de Juego™) de VEXcode VR proporciona coordenadas (X, Y) para la navegación en el campo de juego de alto riesgo V5RC. Utiliza el código de campo VEX, un patrón de tablero de ajedrez en el interior del campo, para determinar la posición y el rumbo. El sensor funciona como un sistema de posición absoluta, eliminando la deriva y la necesidad de calibración individual.
¿Cómo funciona el sensor GPS?#
Un robot VEX Robotics con una estructura compleja compuesta por componentes metálicos y varias piezas electrónicas. Dos sensores GPS VEX, ubicados en el armazón del robot, están resaltados en amarillo. Estos sensores se utilizan para una navegación y posicionamiento precisos durante tareas autónomas, lo/_static/img/playgrounds/v5rc_high_stakes/axel_gps_sensors.pngayuda al robot a determinar su ubicación exacta en el campo.
Para la navegación, el sensor GPS utiliza el sistema de coordenadas cartesianas, con el centro del campo designado como (0, 0). El sensor es una cámara en blanco y negro montada en la parte trasera del robot, orientada hacia atrás para leer el código de campo con eficacia.
El sensor GPS informa las coordenadas (X, Y) del centro de rotación de Axel en milímetros o pulgadas. Esto permite un seguimiento preciso de la posición del robot dentro del entorno de realidad virtual VEXcode, lo que facilita una navegación y un posicionamiento precisos durante el juego o las tareas de programación.
Identificación de coordenadas (X, Y) en el campo#
El campo de alto riesgo V5RC en VEXcode VR varía aproximadamente de -1800 mm a 1800 mm para las posiciones X e Y. La ubicación inicial de Axel depende de la [posición inicial seleccionada] (https://api.vex.com/vr/home/playgrounds/v5rc_high_stakes/field_details.html#field-starting-configurations).
La ubicación central, o el origen (0,0), se encuentra en el centro del Campo.
Un campo de VEX Robotics con un sistema de coordenadas X e Y superpuesto. El eje X está marcado en rojo, mientras que el eje Y está marcado en azul. Las coordenadas están marcadas a intervalos de 600 mm, con el centro del campo como origen en (0 mm, 0 mm). La cuadrícula cubre de -1800 mm a 1800/_static/img/playgrounds/v5rc_high_stakes/field_grid.pngen ambas direcciones.
Coordenadas (X, Y) de los elementos del juego#
Wall Stakes#
Un campo de VEX Robotics con coordenadas marcadas en dos puntos específicos de las estacas de pared: (-1750, 0) y (1750,/_static/img/playgrounds/v5rc_high_stakes/field_wall_stakes.png). Estos puntos están resaltados con puntos verdes y etiquetas. El campo está organizado con varios elementos de juego, incluyendo anillos rojos y azules, así como porterías hexagonales amarillas.
Field Corners#
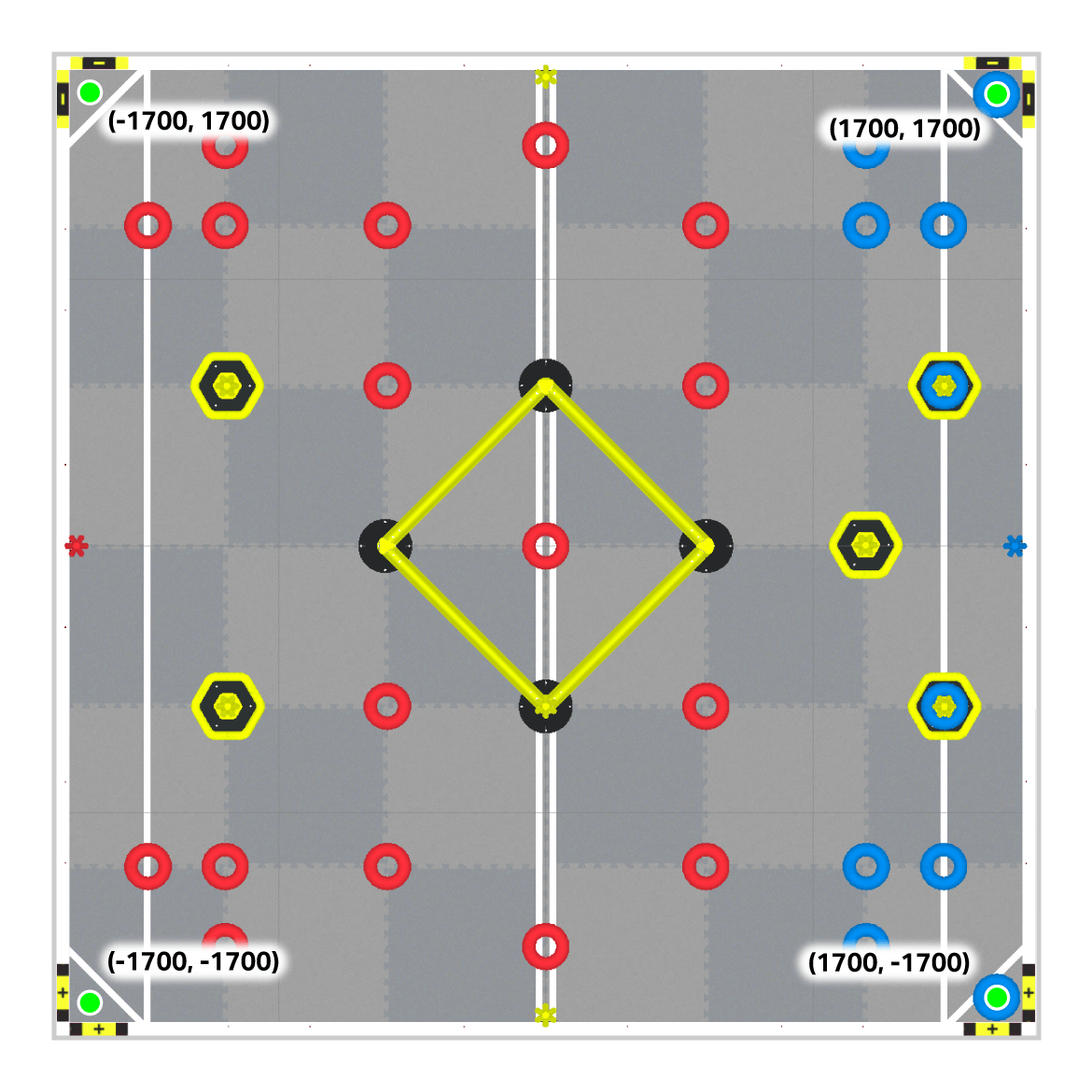
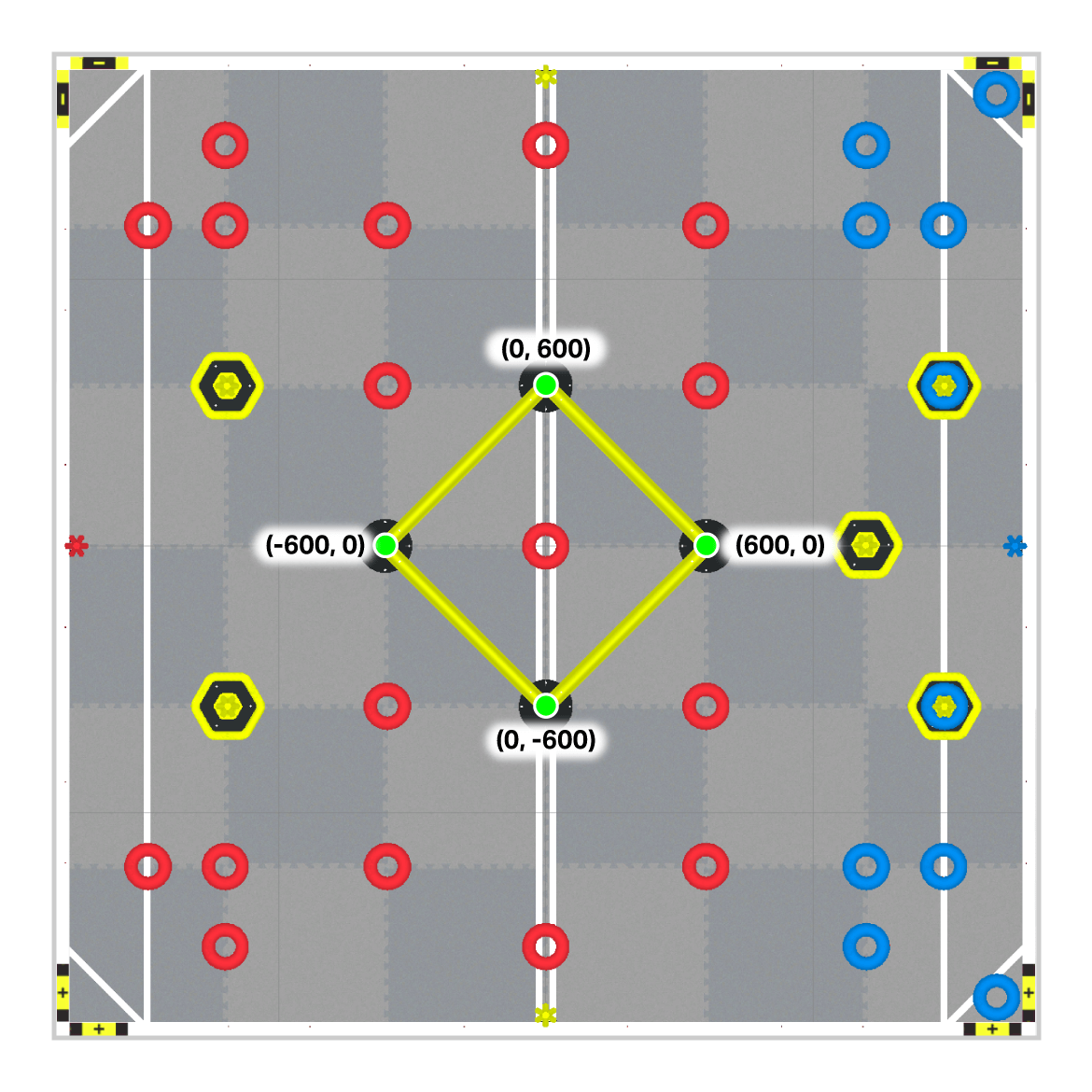
Ladder Posts#
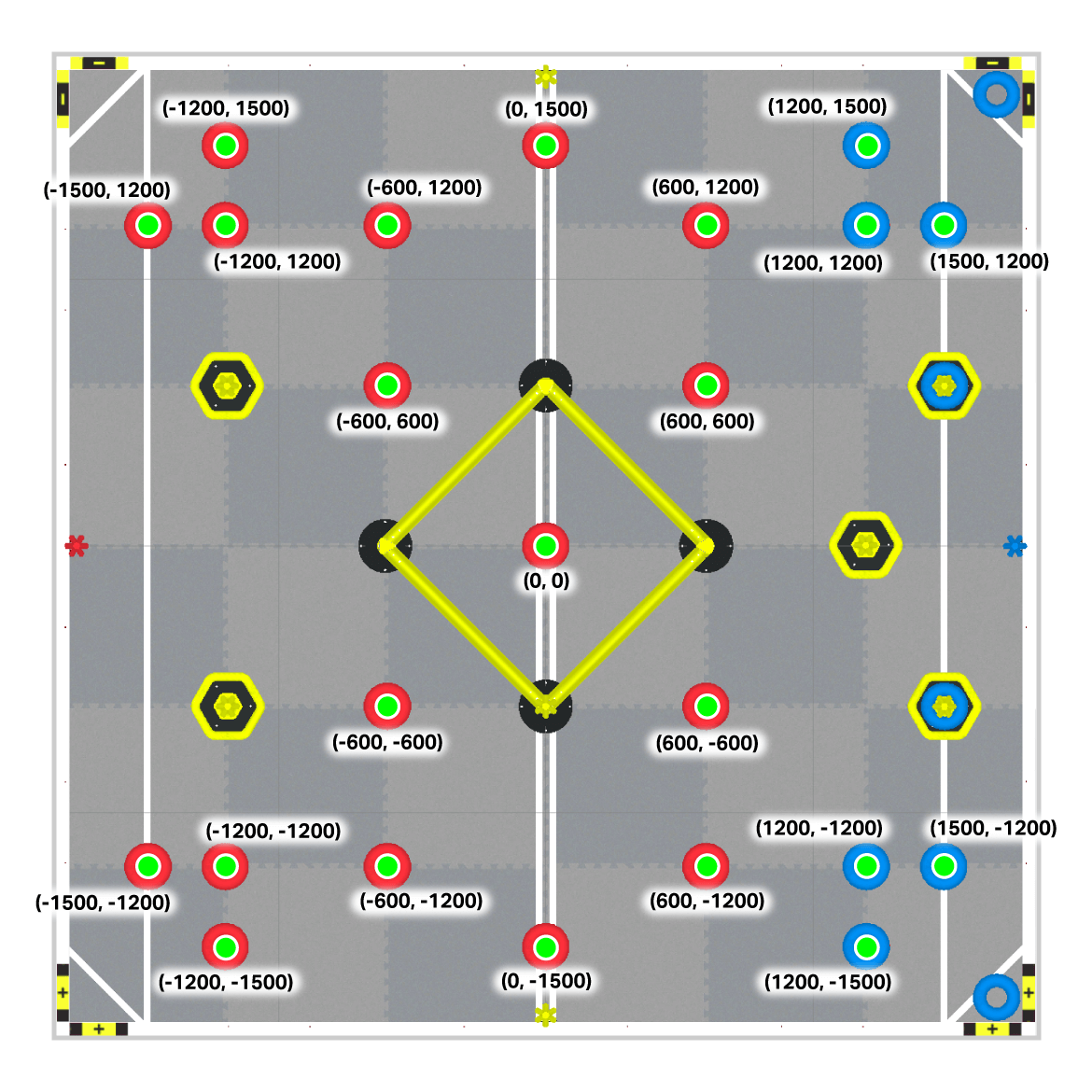
Red Rings#
Este mapa muestra 23 Anillos Rojos en el campo. El Anillo Rojo número 24 está precargado en Axel al inicio del proyecto.
Blue Rings#
Un campo de VEX Robotics con anillos rojos y azules en varias ubicaciones. Este mapa muestra las coordenadas solo/_static/img/playgrounds/v5rc_high_stakes/field_blue_rings.pnglos 10 anillos azules del campo.
Mobile Goals#
Un campo de VEX Robotics con anillos rojos y azules. Este mapa muestra las coordenadas únicamente/_static/img/playgrounds/v5rc_high_stakes/field_mobile_goals.pnglas 5 porterías móviles.