机器人详细信息#
V5RC 虚拟技能 - 高风险 游乐场使用标准 VEX V5 英雄机器人 Axel。
Axel VEX V5 Hero Bot 长约 350 毫米,宽约 280 毫米。
汽车集团#
Axel 为其手臂和推进器配备了两套电机组。
配置 & |
描述 |
API 文档 |
|---|---|---|
|
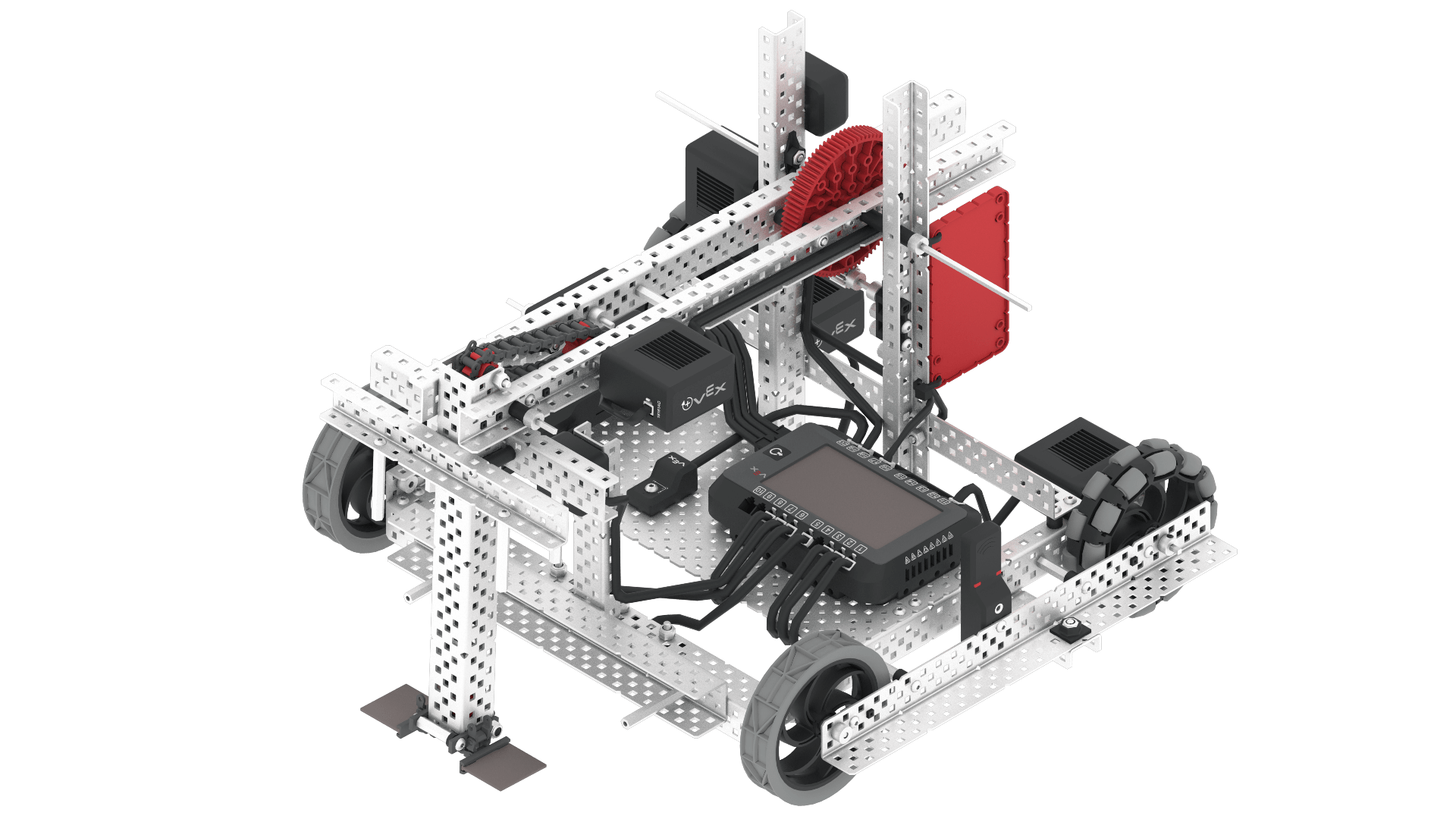
机械臂用于升降阿克塞尔的机械臂。机械臂必须升高才能不遮挡人工智能视觉传感器,并将环推到桩上。0 |
|
|
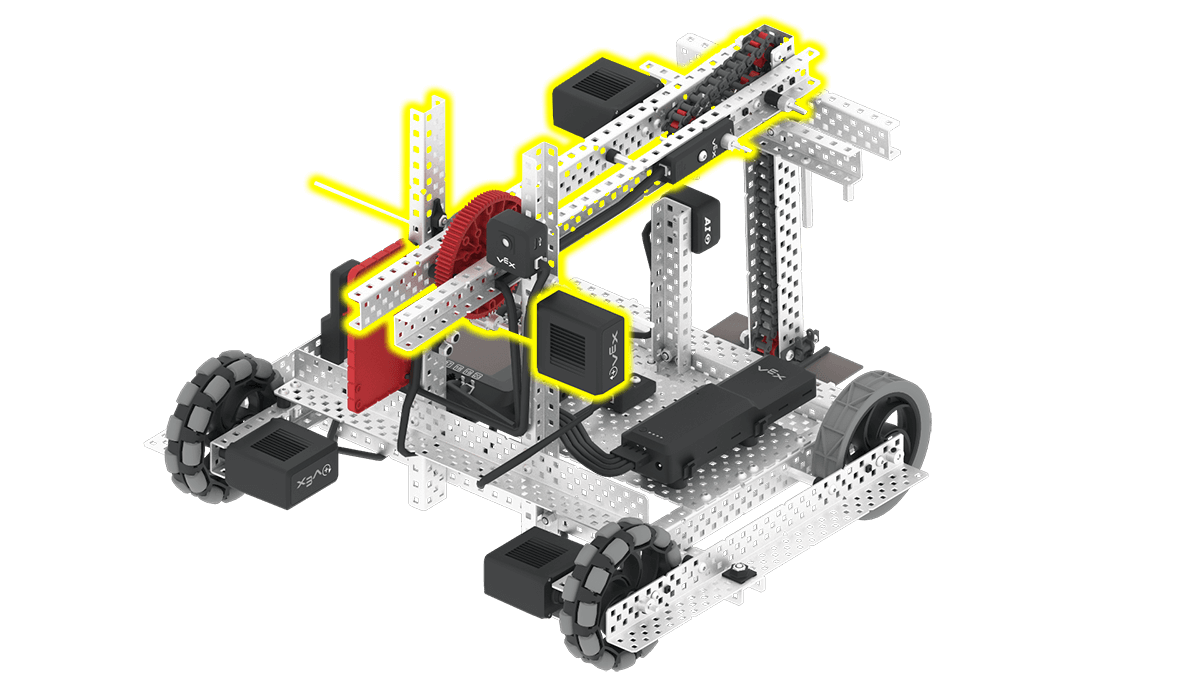
推进器电机 |
传感器#
Axel 可以使用以下传感器进行自主编码:
配置 |
描述 |
API 文档 |
Python 命令名称 |
|---|---|---|---|
大脑计时器 |
机器人可以使用内置计时器。 |
|
|
惯性 |
机器人可以使用惯性传感器来跟踪机器人的当前航向和旋转角度。 |
|
|
旋转 |
机器人可以使用旋转传感器来跟踪推进器电机的当前旋转角度和位置。 |
|
|
前方距离 |
机器人前端有一个距离传感器,可以让它看到机器人前端当前距离物体的距离。 |
|
|
前置光学 |
报告机器人正前方是否有物体。这还可以确定物体的颜色,以便机器人区分红环、蓝环和黄色移动目标。 |
|
|
GPS(游戏定位系统™) |
以毫米或英寸为单位报告轴 |
|
|
人工智能视觉传感器 |
可以自动区分游戏元素的摄像头,使机器人能够自主地朝着特定的游戏元素移动。 |
|