Controller#
Introduction#
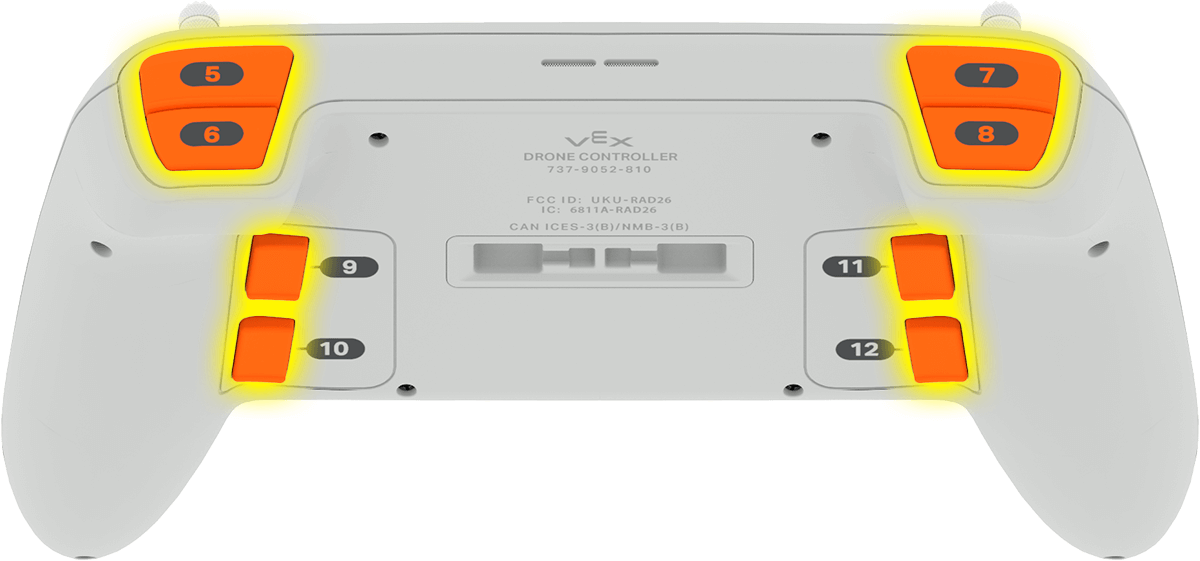
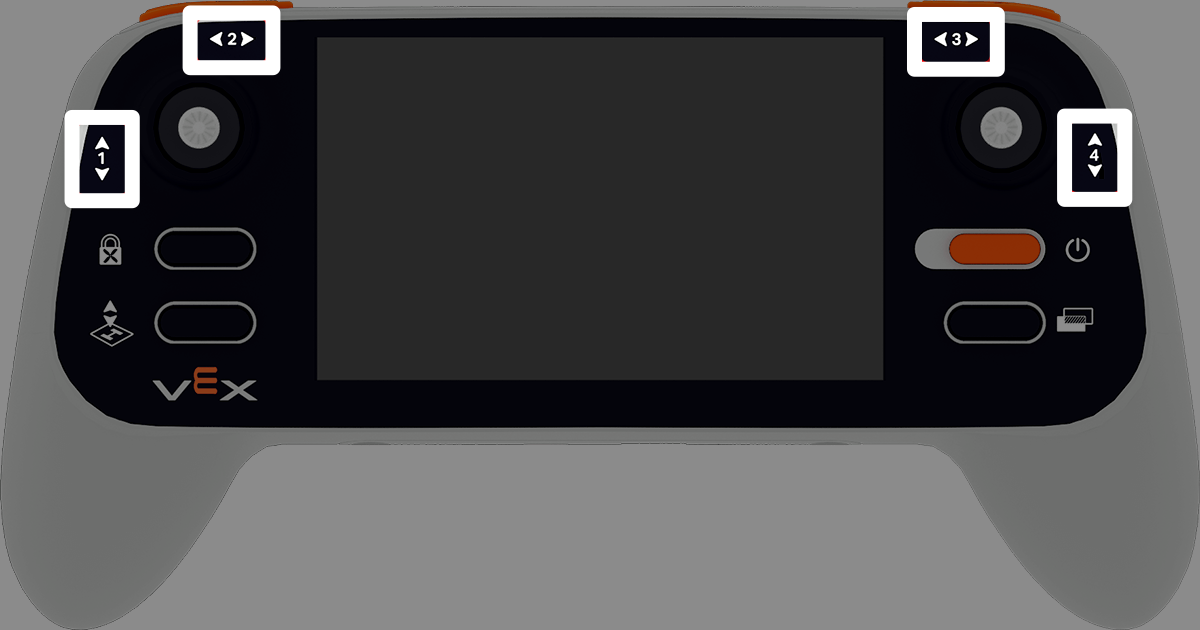
The VEX AIR Drone Controller features a 12-button layout and two joysticks. These inputs allow the drone to detect button presses and joystick movements, enabling interactive and responsive control.
Below is a list of all available methods:
Getters – Read button, joystick, and connection status.
pressing– Returns if a specific button is currently being pressed.position– Returns the position of the joystick along a specified axis.is_drone_connected– Returns whether the controller is connected to the drone.get_battery_level– Returns the controller’s battery level.
Callbacks – Respond to button or joystick input changes.
Getters#
pressing#
pressing returns a Boolean indicating whether a specific button on the controller is currently being pressed. This method must be called on a specific button object, such as button5 (see full list of button objects below).
True- The specified button is being pressed.False- The specified button is not being pressed.
Usage:
One of eight available buttons, numbered 5 through 12, can be used with this method, as shown below:
Button |
Command |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Parameters |
Description |
|---|---|
This method has no parameters. |
# Take a picture when button 5 is pressed.
drone.take_off(climb_to=500)
while True:
# Fly using the controller sticks
drone.move_with_vectors(
forward=controller.axis4.position(),
rightward=controller.axis3.position(),
upward=controller.axis1.position(),
rotation=controller.axis2.position()
)
# Capture an image from the forward camera when button 5 is pressed.
if controller.button5.pressing():
drone.camera.capture_image(FORWARD_CAMERA)
wait(5, MSEC)
position#
position returns the position of the joystick’s specified axis, as a percentage from –100% to 100%.
Usage:
One of four available axes can be used with this method, numbered 1 to 4.
Axis |
Command |
|---|---|
|
|
|
|
|
|
|
|
Parameters |
Description |
|---|---|
This method has no parameters. |
# Climb when the left joystick is moved up.
drone.take_off(climb_to=500)
while True:
if controller.axis1.position() > 0:
drone.climb(direction=UP, velocity=50)
else:
drone.hover()
wait(5, MSEC)
is_drone_connected#
is_drone_connected returns a Boolean indicating whether the drone is connected.
True- The drone is connected.False- The drone is not connected.
Usage:
controller.is_drone_connected()
Parameters |
Description |
|---|---|
This method has no parameters. |
# Print controller connection status on screen.
while True:
if controller.is_drone_connected():
controller.screen.clear_screen()
controller.screen.set_cursor(1, 1)
controller.screen.print("Controller connected")
wait(0.5, SECONDS)
get_battery_level#
get_battery_level returns the Controller’s battery level, as a percentage from 0% to 100%.
Usage:
controller.get_battery_level()
Parameters |
Description |
|---|---|
This method has no parameters. |
# Show controller's battery level.
if controller.get_battery_level() > 50:
controller.screen.print("Battery level ok")
else:
controller.screen.print("Battery level low")
Callbacks#
pressed#
pressed runs a function when the specified button is pressed. Once it is used, the function will run automatically each time that button is pressed.
Usage:
One of eight available buttons can be used with this method, numbered 5 to 12.
Button |
Command |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Parameters |
Description |
|---|---|
|
A previously defined function to run each time the specified button is pressed. |
|
Optional. A tuple containing arguments to pass to the callback function. See Using Events with Parameters for more information. |
# Take a picture when button 5 is pressed.
def take_picture():
drone.camera.capture_image(FORWARD_CAMERA)
# Run take_picture each time button 5 is pressed.
controller.button5.pressed(take_picture)
# Fly using the controller sticks.
drone.take_off(climb_to=500)
while True:
drone.move_with_vectors(
forward=controller.axis4.position(),
rightward=controller.axis3.position(),
upward=controller.axis1.position(),
rotation=controller.axis2.position()
)
wait(5, MSEC)
released#
released runs a function when the specified button is released. Once it is used, the function will run automatically each time that button is released.
Usage:
One of eight available buttons can be used with this method, numbered 5 to 12.
Button |
Command |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Parameters |
Description |
|---|---|
|
A previously defined function to run each time the specified button is released. |
|
Optional. A tuple containing arguments to pass to the callback function. See Using Functions with Parameters for more information. |
# Take a picture when button 5 is released.
def take_picture():
drone.camera.capture_image(FORWARD_CAMERA)
# Run take_picture each time button 5 is released.
controller.button5.released(take_picture)
# Fly using the controller sticks.
drone.take_off(climb_to=500)
while True:
drone.move_with_vectors(
forward=controller.axis4.position(),
rightward=controller.axis3.position(),
upward=controller.axis1.position(),
rotation=controller.axis2.position()
)
wait(5, MSEC)
changed#
changed runs a function when the joystick’s position changes along the specified axis. Once it is used, the function will run automatically each time the joystick’s position changes along that axis.
Usage:
One of four available axes can be used with this method, numbered 1 to 4.
Axis |
Command |
|---|---|
|
|
|
|
|
|
|
|
Parameters |
Description |
|---|---|
|
A previously defined function to run each time the joystick’s position changes along the specified axis. |
|
Optional. A tuple containing arguments to pass to the callback function. See Using Functions with Parameters for more information. |
# Move forward when the left joystick moves.
def on_axis1_changed():
drone.move_for(direction=0, distance=200, velocity=50, units=MM)
drone.take_off(climb_to=500)
controller.axis1.changed(on_axis1_changed)