Laberinto de pared#
Wall Maze es un parque infantil gratuito cuyo objetivo es recorrer un laberinto para llegar a la salida.
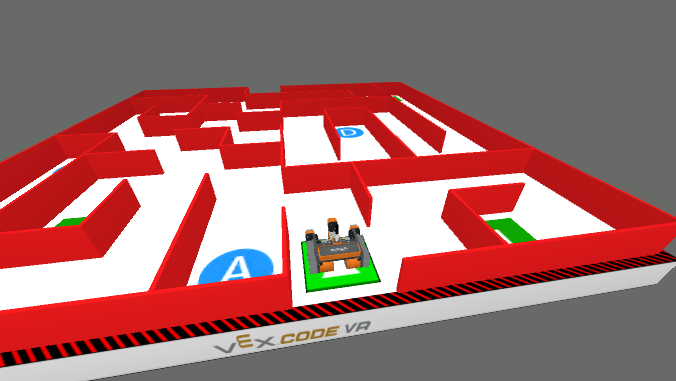
Descripción general del parque infantil#
Objetivo: Recorrer un laberinto para llegar a la salida.
Posición inicial:
(128, -875)Tamaño del mapa:
2000 x 2000 mm
Descripción general del robot#
Wall Maze utiliza el Robot VR estándar.