Mapa de cuadrícula numérica#
Number Grid Map es un espacio de juego gratuito cuyo objetivo es utilizar la cuadrícula numerada para practicar el conteo, la navegación y el movimiento del robot de realidad virtual a través de casillas numeradas del 1 al 100.
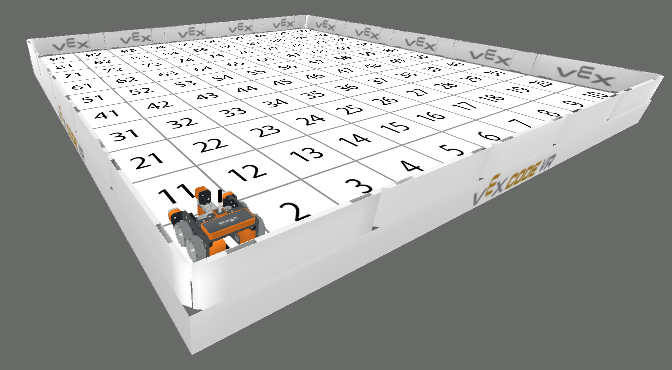
Descripción general del parque infantil#
Objetivo: Utilizar la cuadrícula numerada para practicar el conteo, la navegación y el movimiento del robot de realidad virtual a través de las casillas numeradas del 1 al 100.
Posición inicial:
(-900, -900)Tamaño del mapa:
2000 x 2000 mm
Descripción general del robot#
Number Grid Map utiliza el Robot VR estándar.