V5RC 24-25 Altas apuestas#
V5RC - High Stakes fue el juego de la competición de robótica VEX V5 (V5RC) para la temporada 2024-2025.
Para conocer las reglas del juego, acceda al manual del juego aquí.
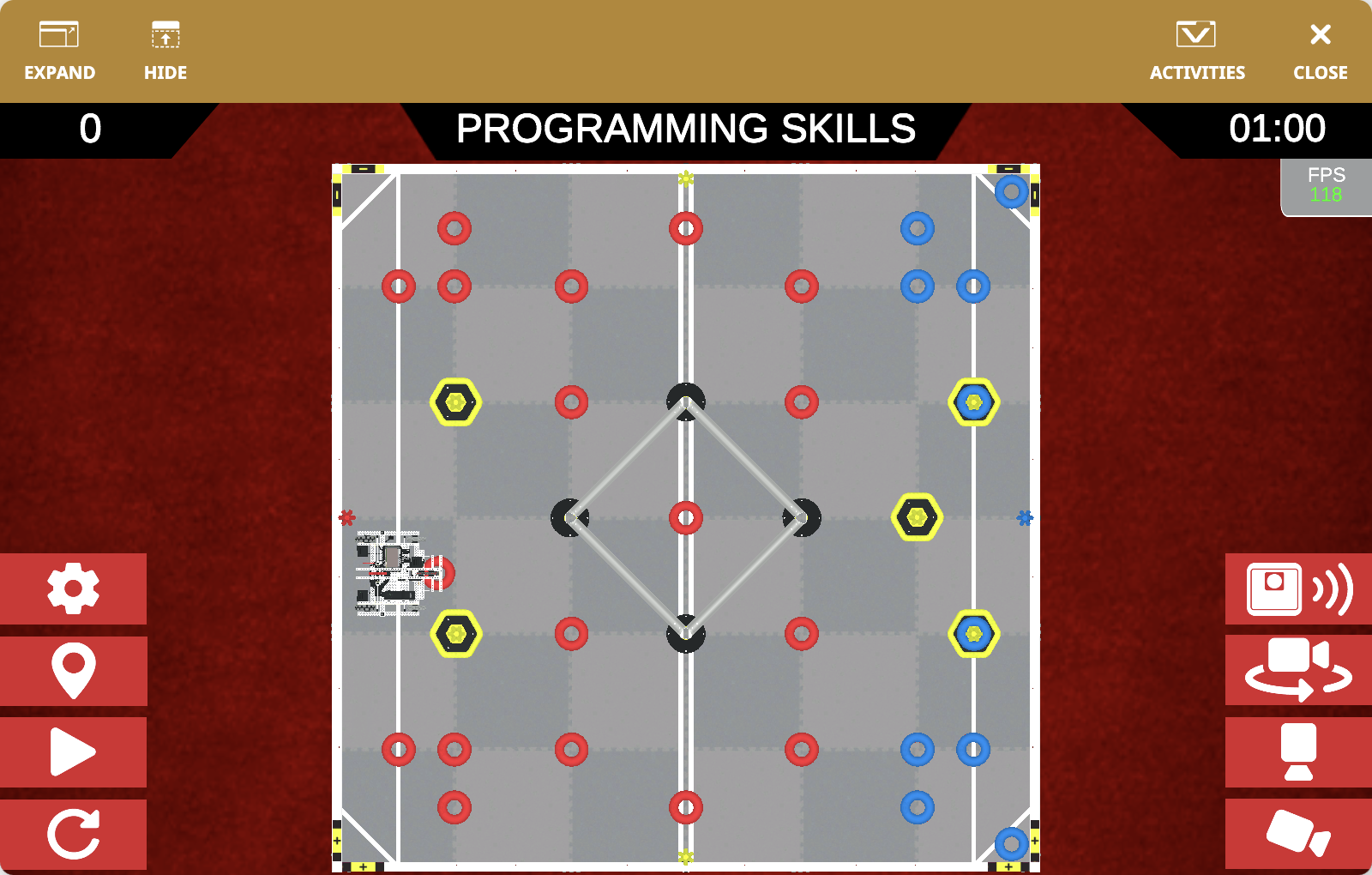
El V5RC 24-25 High Stakes Playground te permite intentar conseguir el mayor número de puntos en el desafío de Habilidades de Programación de la temporada.
Descripción general del campo#
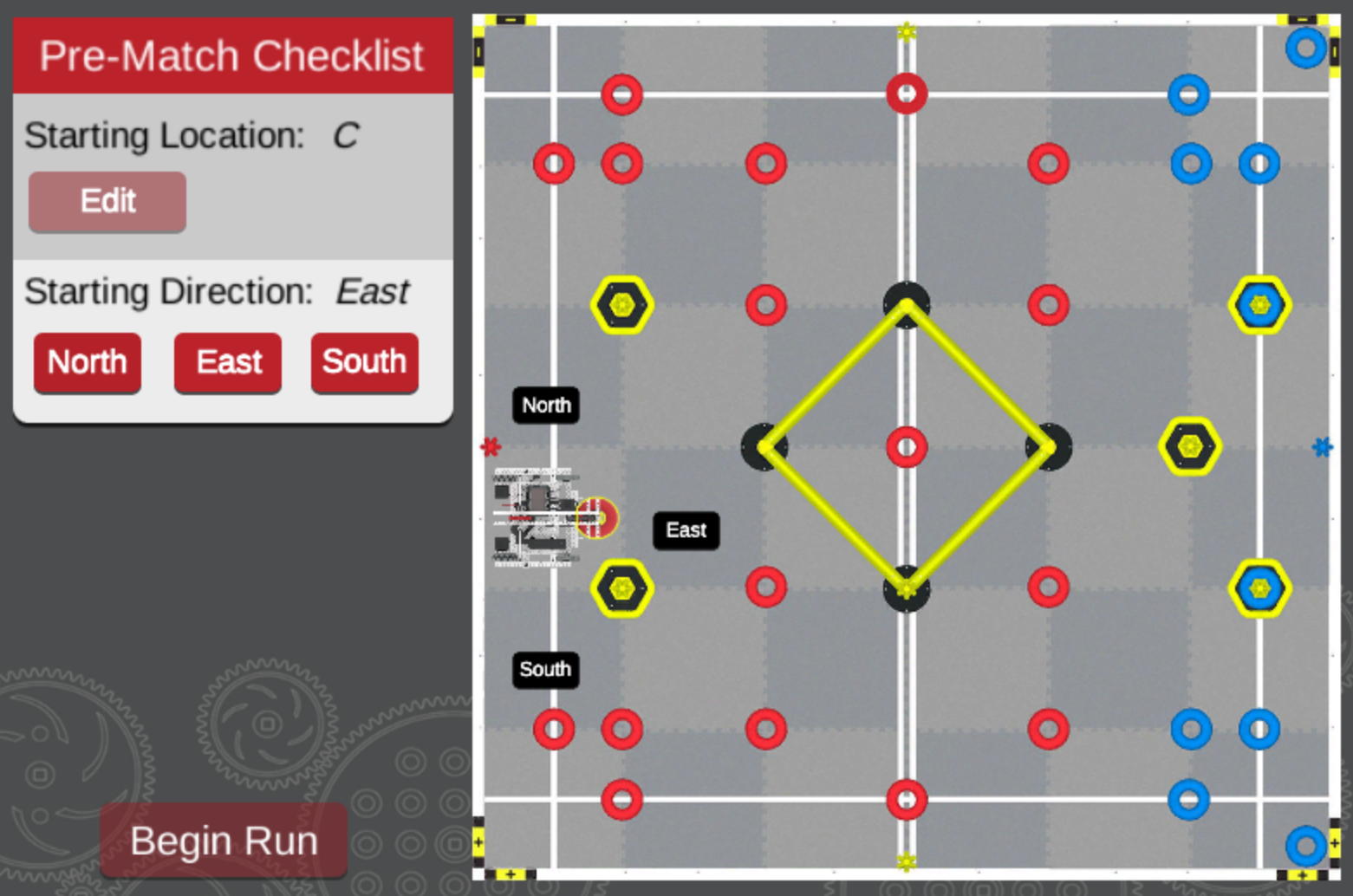
El Playground tiene cuatro ubicaciones de inicio diferentes que se pueden configurar mediante la lista de verificación previa al partido del Playground, que aparecerá la primera vez que abras el Playground.
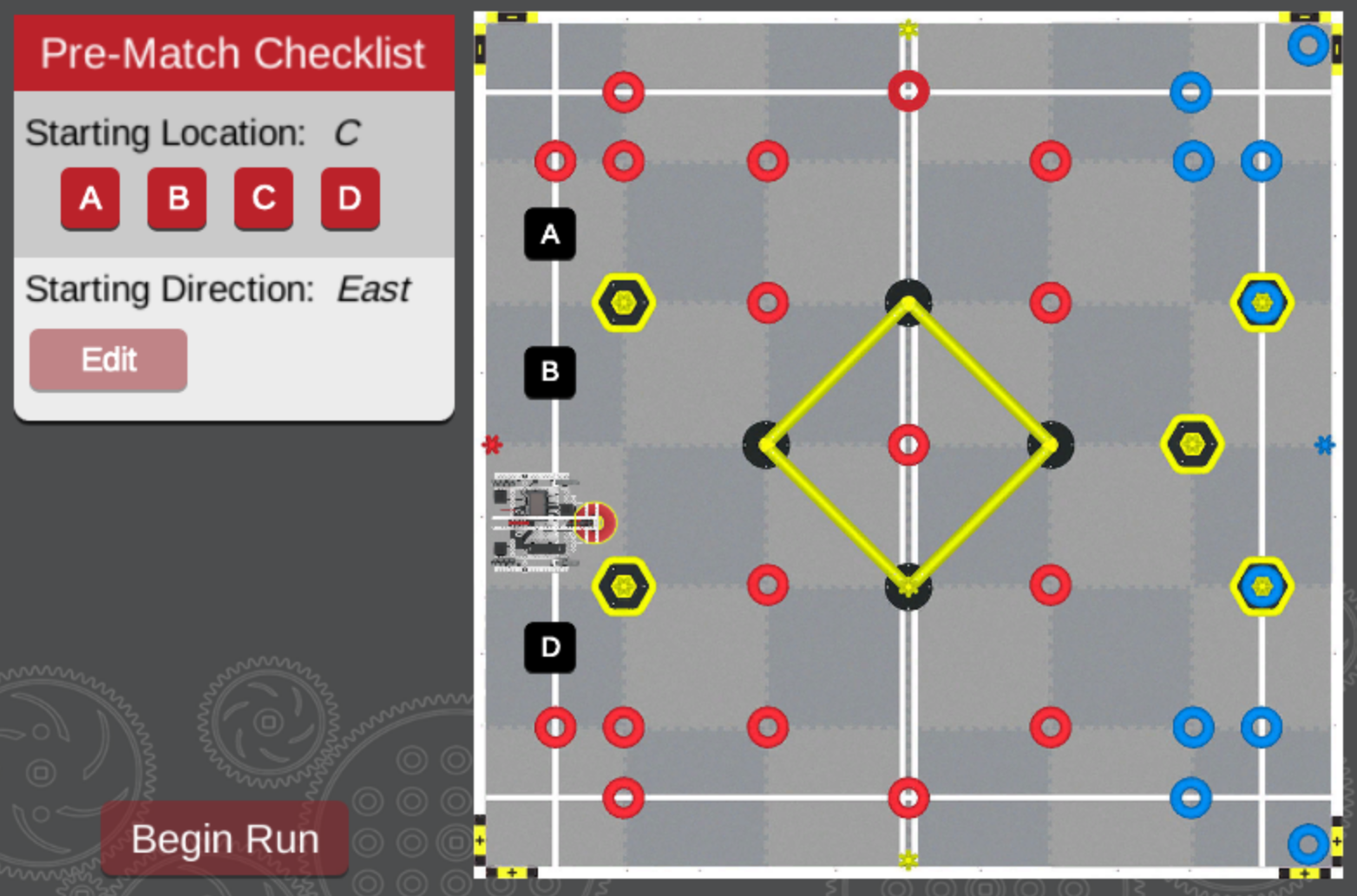
También puedes configurar la dirección en la que apuntará el robot al inicio del proyecto.
En el área de juegos hay aros rojos y azules que otorgan puntos al colocarlos sobre las porterías móviles repartidas por todo el recinto.

El campo también utiliza el código de campo GPS para aprovechar el sensor GPS del robot. Vaya a Coordenadas GPS para obtener las coordenadas de lugares u objetos importantes en el campo.
Descripción general del robot#
El V5RC 24-25 High Stakes Playground utiliza el VEX V5 Hero Bot, Axel.
Coordenadas GPS#
El sensor GPS (Sistema de Posicionamiento de Juego) proporciona coordenadas (X, Y) y rumbo para la navegación en el campo de juego de alto riesgo V5RC 24-25, utilizando el código de campo GPS para determinar la posición.
El sensor GPS mide desde el centro exacto del robot, con el centro del campo definido como (0, 0).
Coordenadas (X, Y) de los elementos del juego#
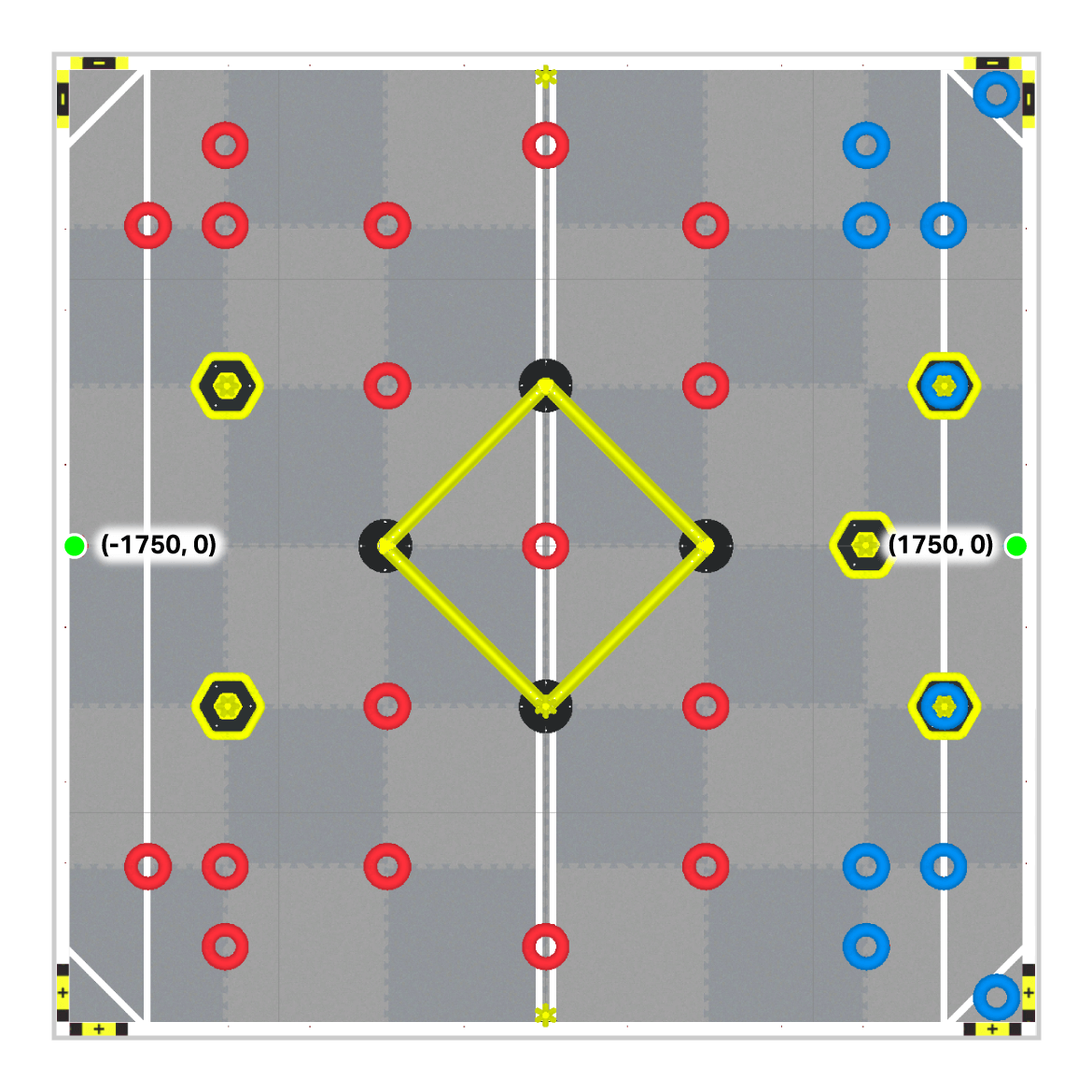
Las siguientes imágenes muestran una vista aérea del campo con las coordenadas GPS de los elementos importantes del juego.
Estacas de pared#
Las estacas de la pared están en los lados izquierdo y derecho del campo, en (-1750, 0) y (1750, 0) respectivamente.
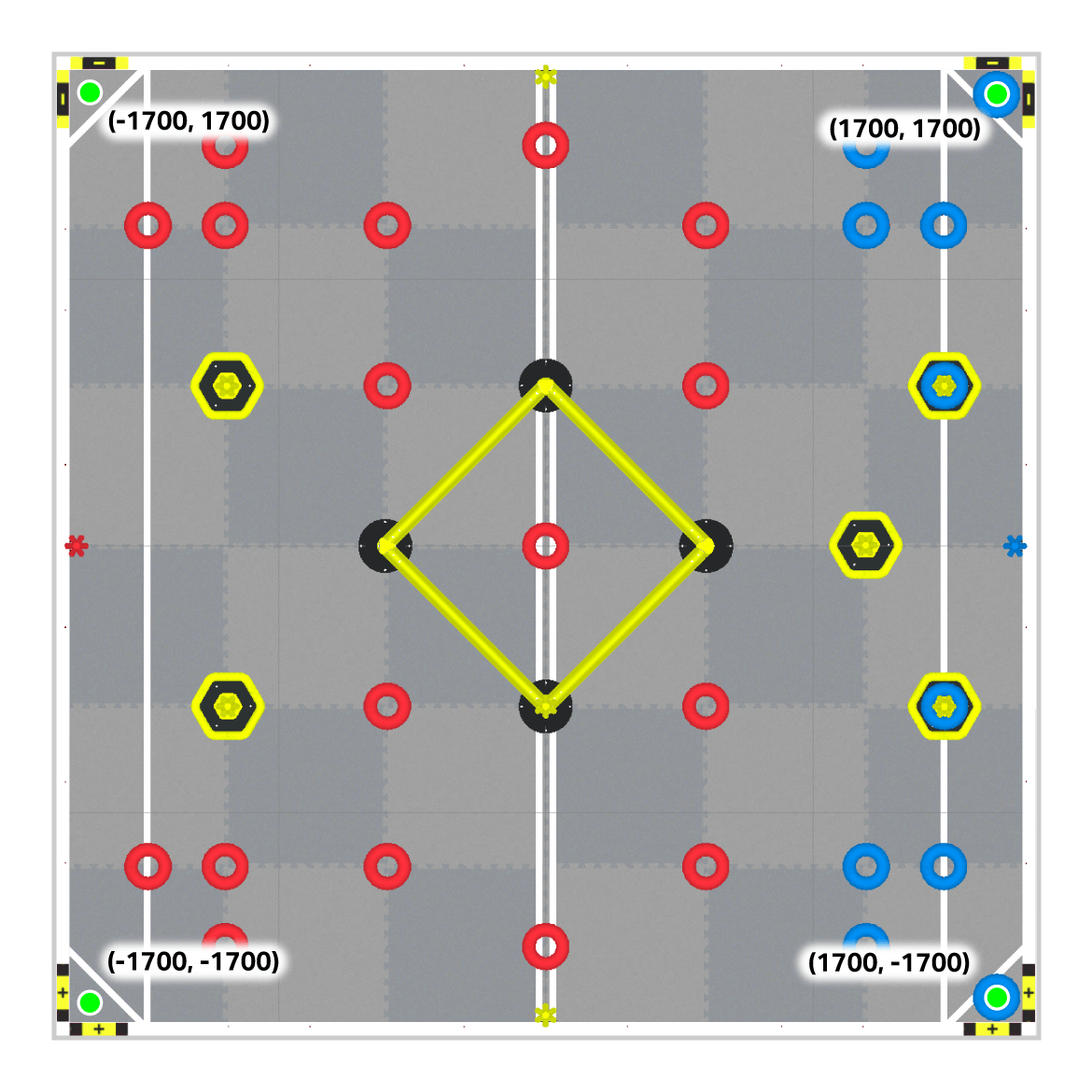
Esquinas del campo#
Posiciones de los marcadores de esquina:
(-1700, 1700)
(1700, 1700)
(-1700, -1700)
(1700, -1700)
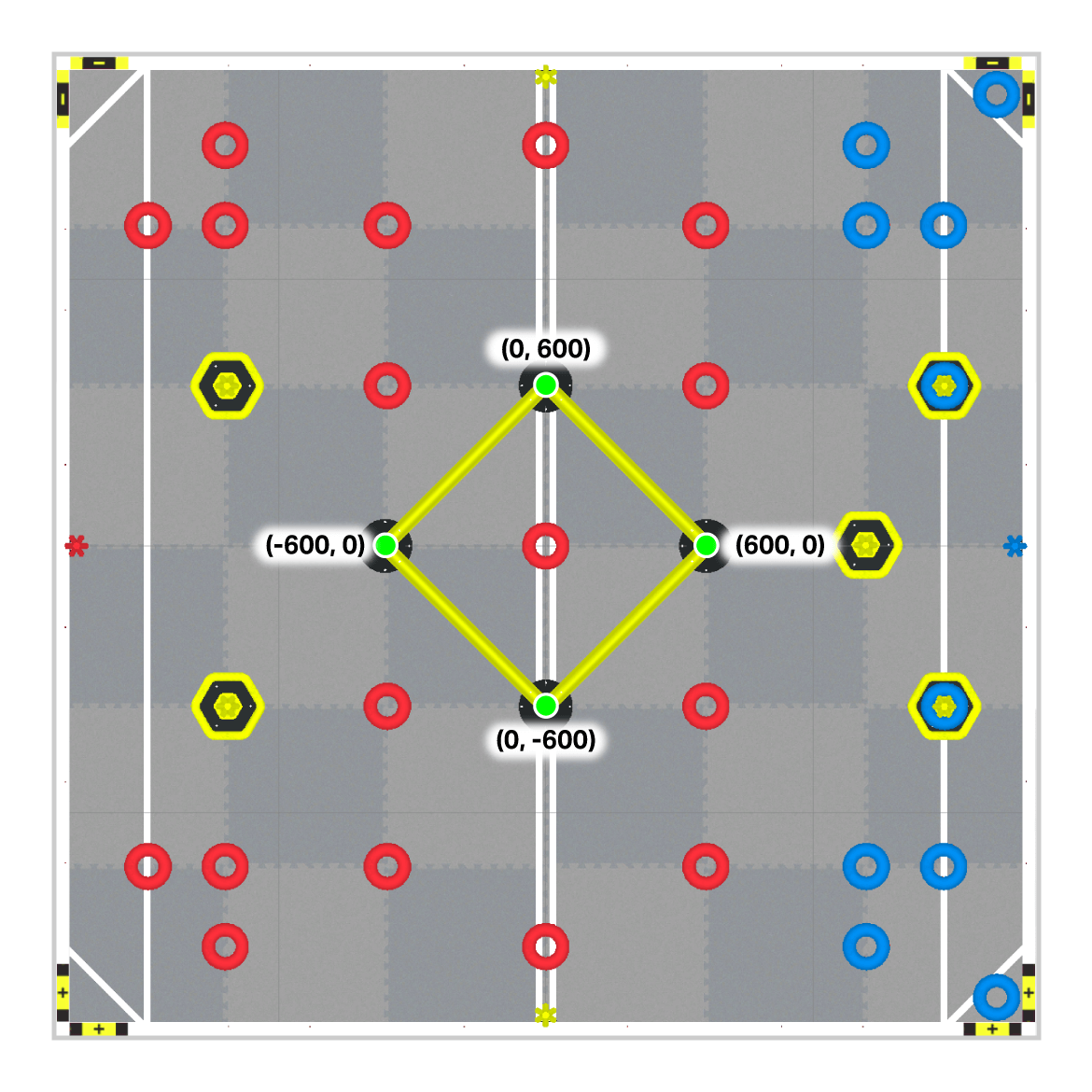
Postes de escalera#
Puestos de la escalera
(0, 600)
(600, 0)
(0, -600)
(-600, 0)
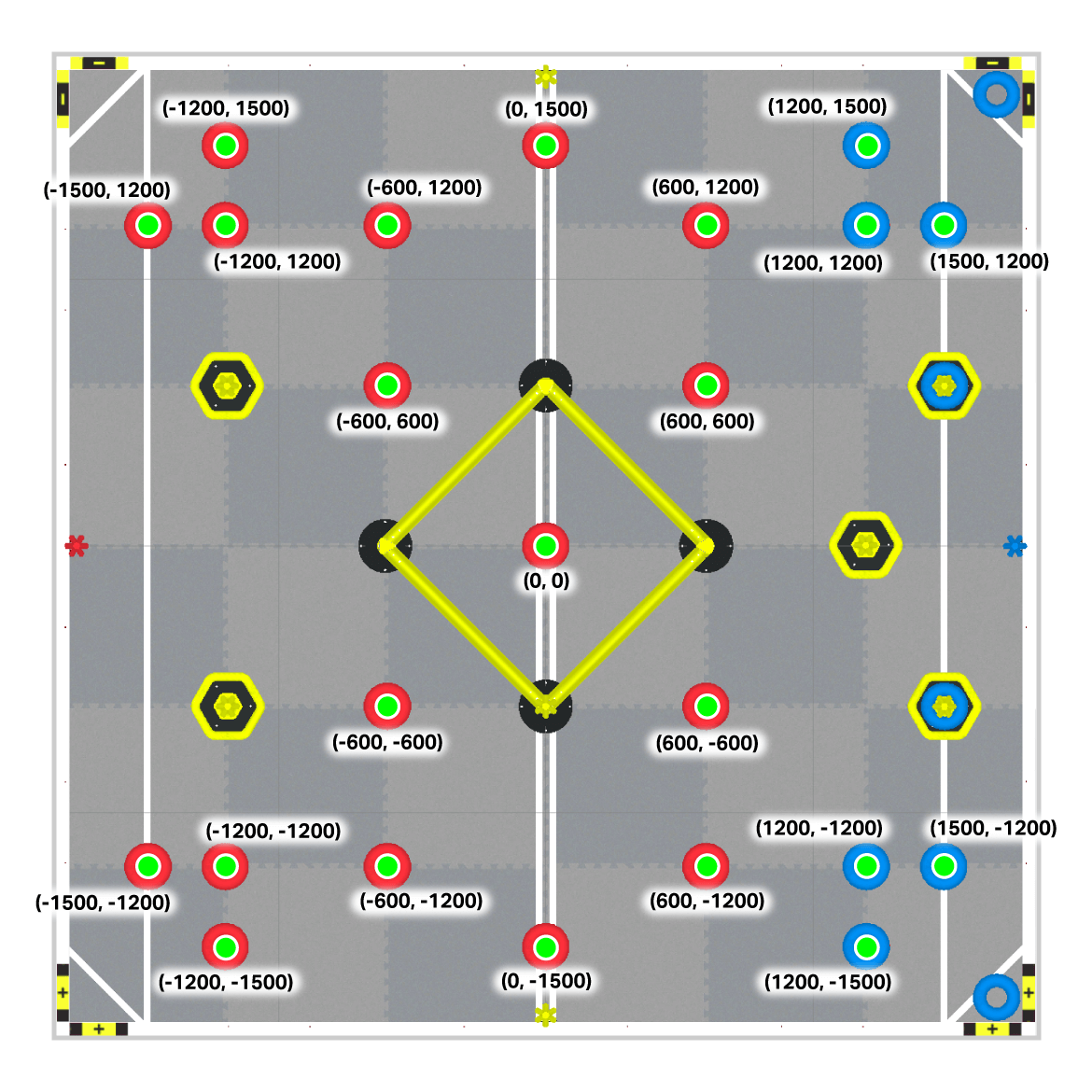
Anillos rojos#
Posiciones del anillo rojo:
Centro: (0, 0)
Mitad inferior (de izquierda a derecha):
(-1500, -1200)
(-1200, -1500)
(-1200, -1200)
(-600, -1200)
(-600, -600)
(0, -1500)
(600, -600)
(600, -1200)
Mitad superior (de izquierda a derecha):
(-1500, 1200)
(-1200, 1500)
(-1200, 1200)
(-600, 1200)
(-600, 600)
(0, 1500)
(600, 1200)
(600, 600)
Anillos azules#
Los anillos azules están ubicados en el lado derecho del campo en:
(1200, -1500)
(1200, -1200)
(1500, -1200)
(1500, 1200)
(1200, 1200)
(1200, 1500)
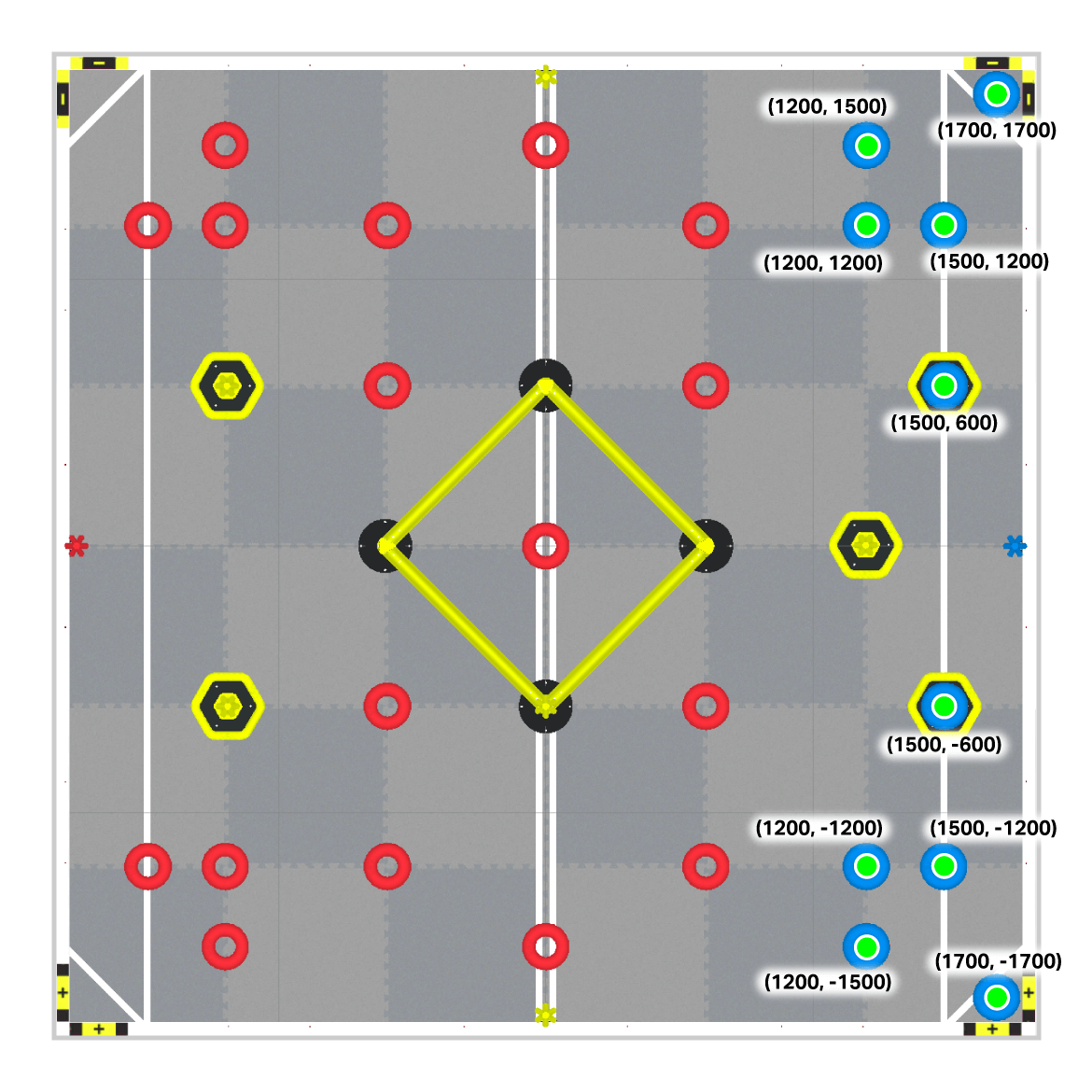
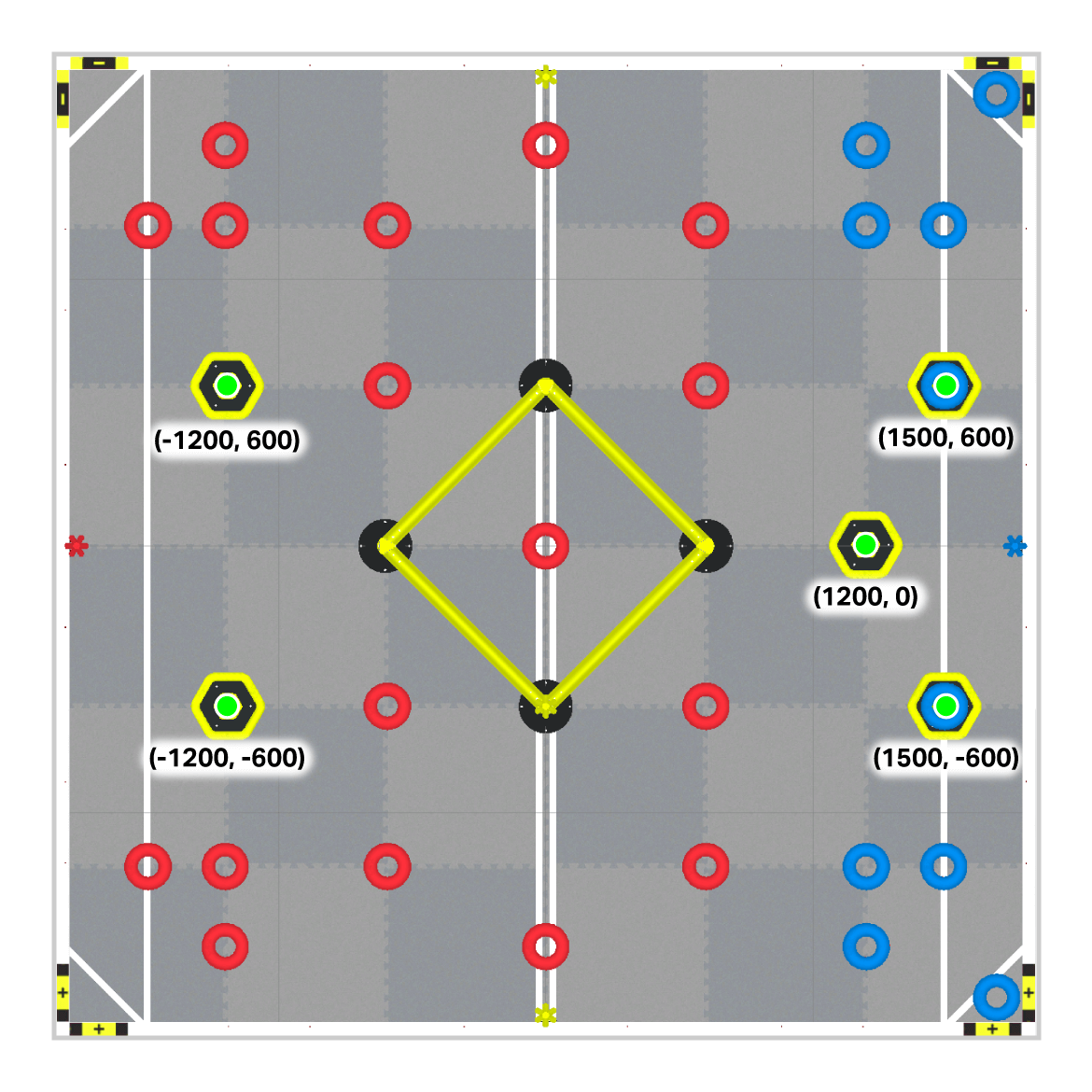
Objetivos móviles#
Posiciones de portería móvil:
Lado izquierdo:
(-1200, -600)
(-1200, 600)
Lado derecho:
(1500, 600)
(1200, 0)
(1500, -600)