Robot Details#
The V5RC Virtual Skills - High Stakes Playground uses the standard VEX V5 Hero Bot, Axel.
The Axel VEX V5 Hero Bot measures approximately 350 millimeters long and 280 millimeters wide.
Motor Groups#
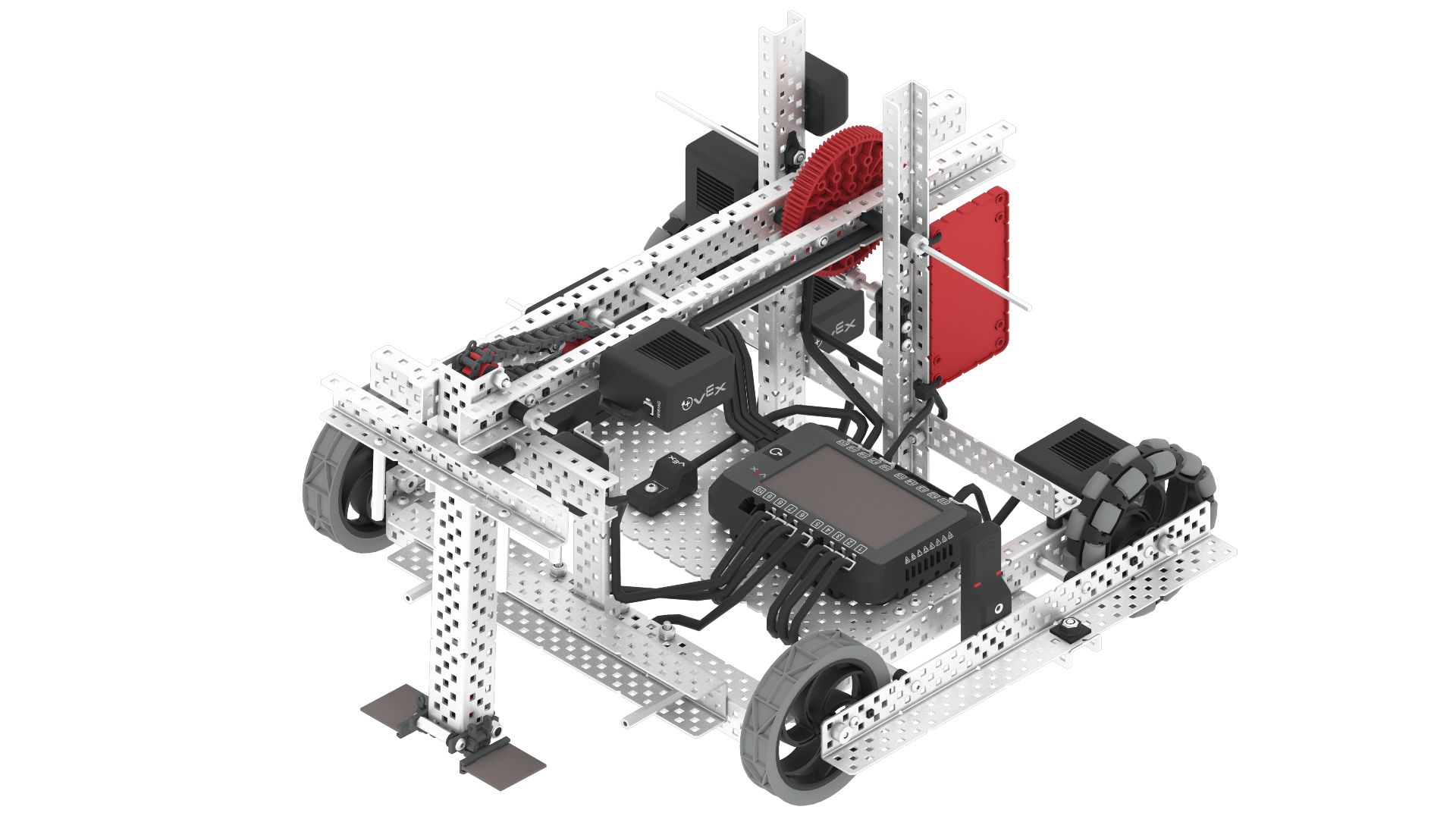
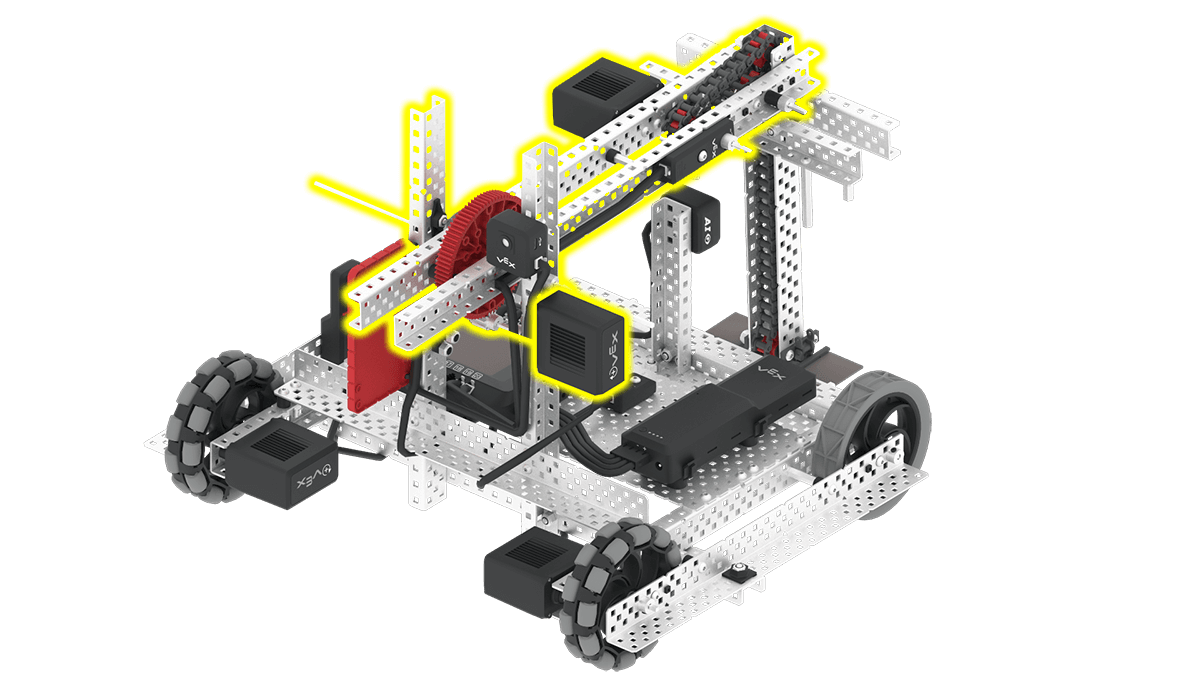
Axel is equipped with two sets of Motor Groups for its Arm and Pusher.
Configuration & |
Description |
API Documentation |
|---|---|---|
|
The Arm lifts and lowers Axel’s Arm. The Arm must be raised to not block the AI Vision Sensor, and to push rings onto stakes. |
|
|
The Pusher Motor moves the pusher down the Arm. This allows for rings to be pushed off of the Arm and onto a stake. The Pusher’s position at the top of the Arm is 0 degrees. |
Sensors#
Axel has access to the following sensors for autonomous coding:
Configuration |
Description |
API Documentation |
Python Command Name |
|---|---|---|---|
Brain Timer |
The Robot has access to a built-in timer. |
|
|
Inertial |
The Robot has access to an Inertial Sensor to track the Robot’s current heading and angle of rotation. |
|
|
Rotation |
The Robot has access to a Rotation Sensor to track the Pusher Motor’s current angle of rotation and position. |
|
|
Front Distance |
The Robot has access to a Distance Sensor on its front, that allows it to see how far the robot’s front currently is from an object. |
|
|
Front Optical |
Reports if there is an object directly in front of the robot. This can also determine the color of the object, so the robot can differentiate between Red Rings, Blue Rings, or the yellow Mobile Goals. |
|
|
GPS (Game Positioning System™) |
Reports the current X and Y position of the center of rotation of Axel in millimeters or inches. The GPS Sensor can also report the current heading in degrees. |
|
|
AI Vision Sensor |
A camera that can automatically differentiate between Game Elements, allowing the robot to orient itself towards specific Game Elements autonomously. |
|