GPS Coordinates#
The GPS (Game Positioning System™) Sensor in VEXcode VR provides (X, Y) coordinates for navigation in the V5RC 25-26 Push Back Playground. It uses the GPS Field Code, a checkerboard pattern on the field’s interior, to determine position and heading. The sensor operates as an absolute position system, eliminating drift and the need for per-field calibration.
How Does the GPS Sensor Work#
For navigation, the GPS Sensor uses the Cartesian Coordinate system, with the field center designated as (0, 0). The sensor itself is a black and white camera mounted on the robot’s rear, facing backward to read the Field Code effectively.
The GPS Sensor reports the (X, Y) coordinates of Dex’s rotation center in either millimeters or inches. This enables precise tracking of the robot’s position within the VEXcode VR environment, allowing for accurate navigation and positioning during gameplay or programming tasks.
Identifying (X, Y) Coordinates on the Field#
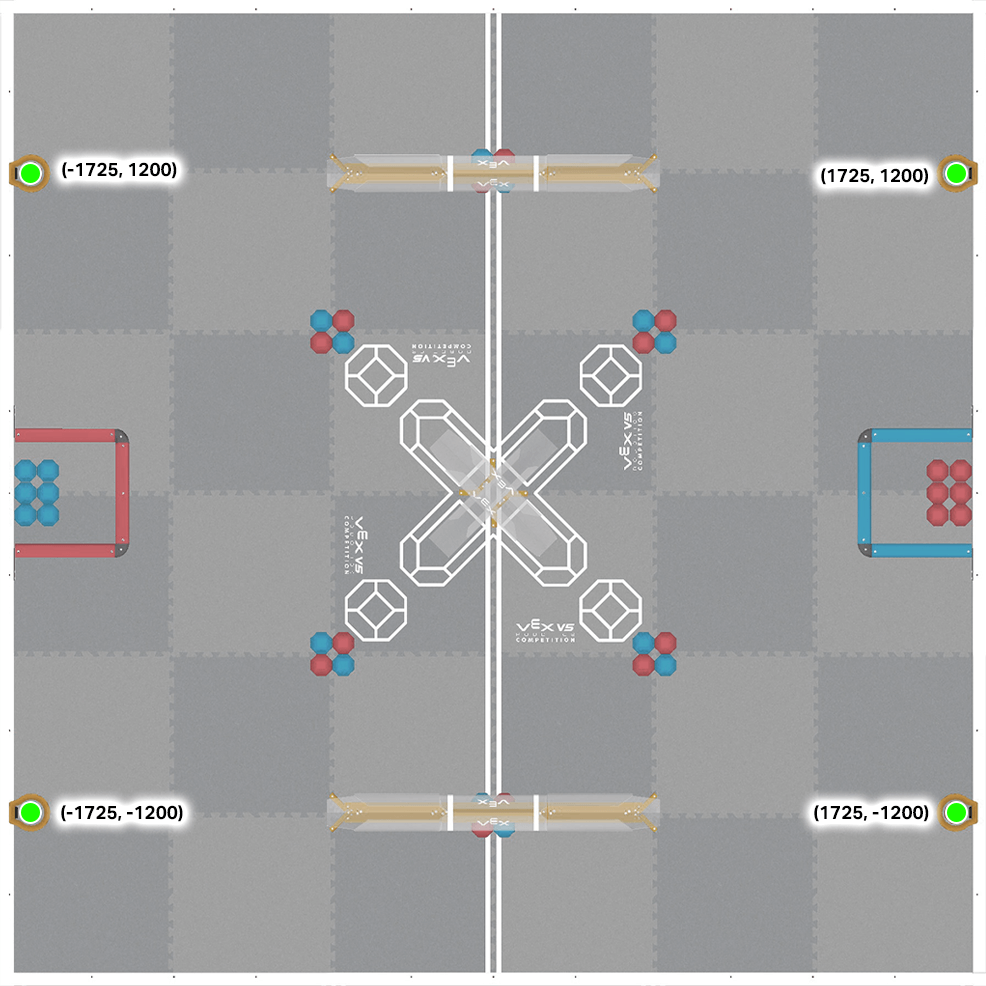
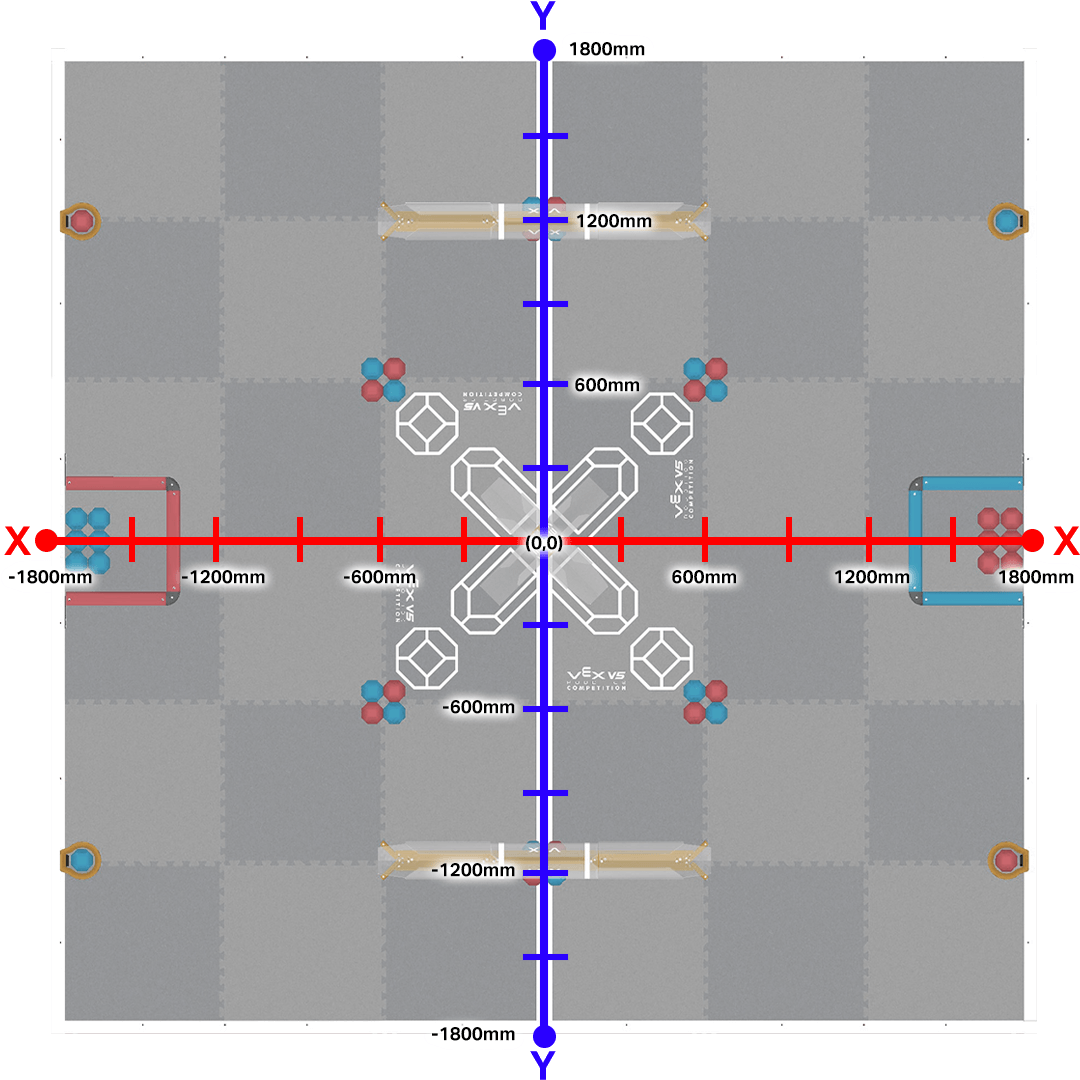
The V5RC Push Back Field in VEXcode VR ranges from approximately -1800mm to 1800mm for the X and Y positions. The starting location of Dex depends on the starting position selected.
The center location, or the origin (0,0), is located in the center of the field.
(X, Y) Coordinates of Game Elements#
Goals#
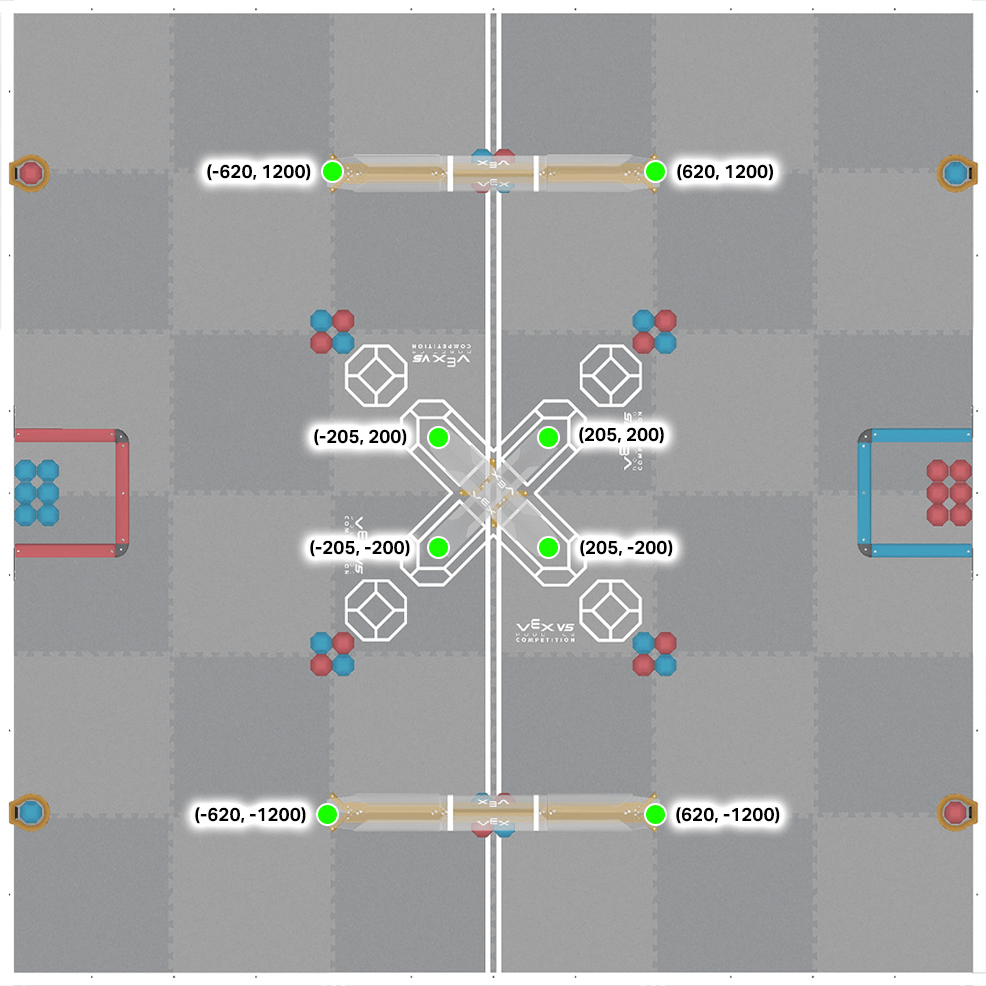
Blocks#
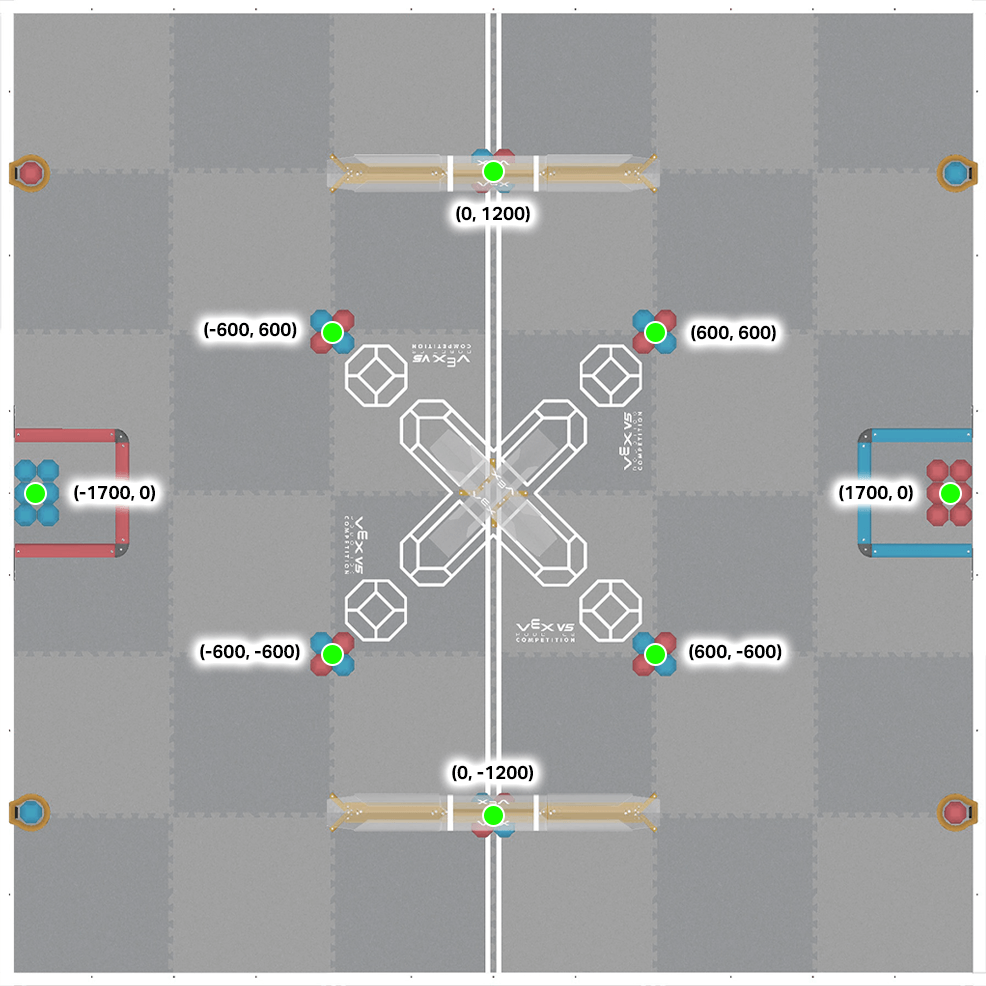
Loaders#