Robot Details#
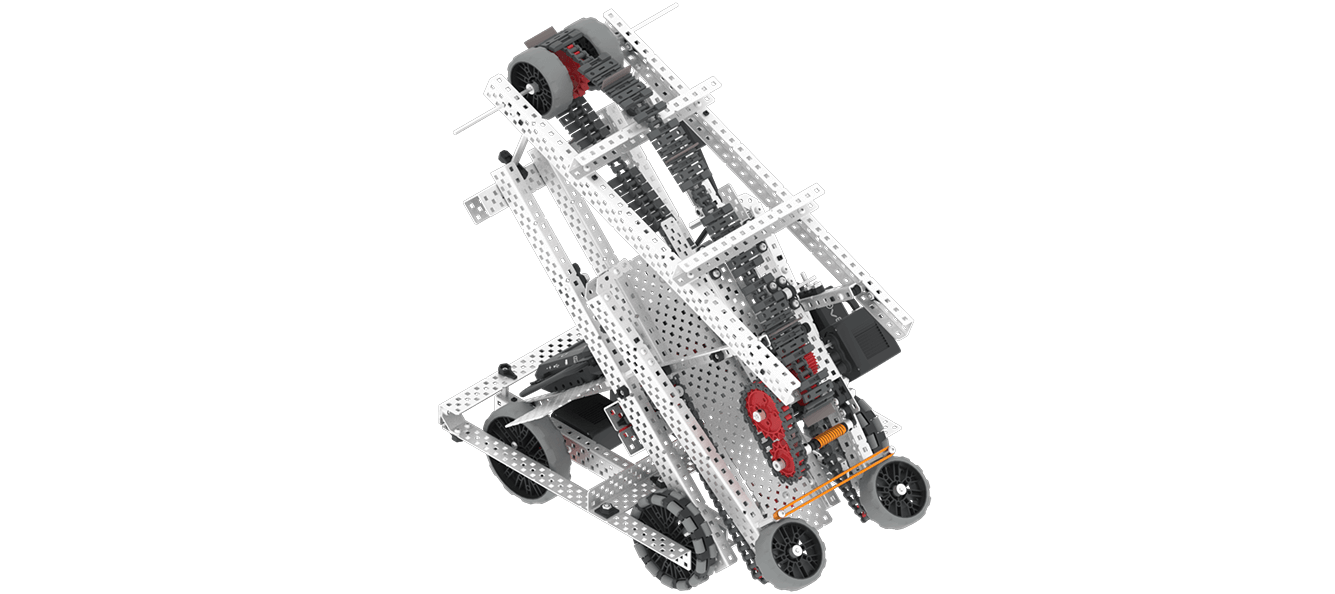
The V5RC Virtual Skills - Push Back Playground uses the standard VEX V5 Hero Bot, Dex.
Motor Groups#
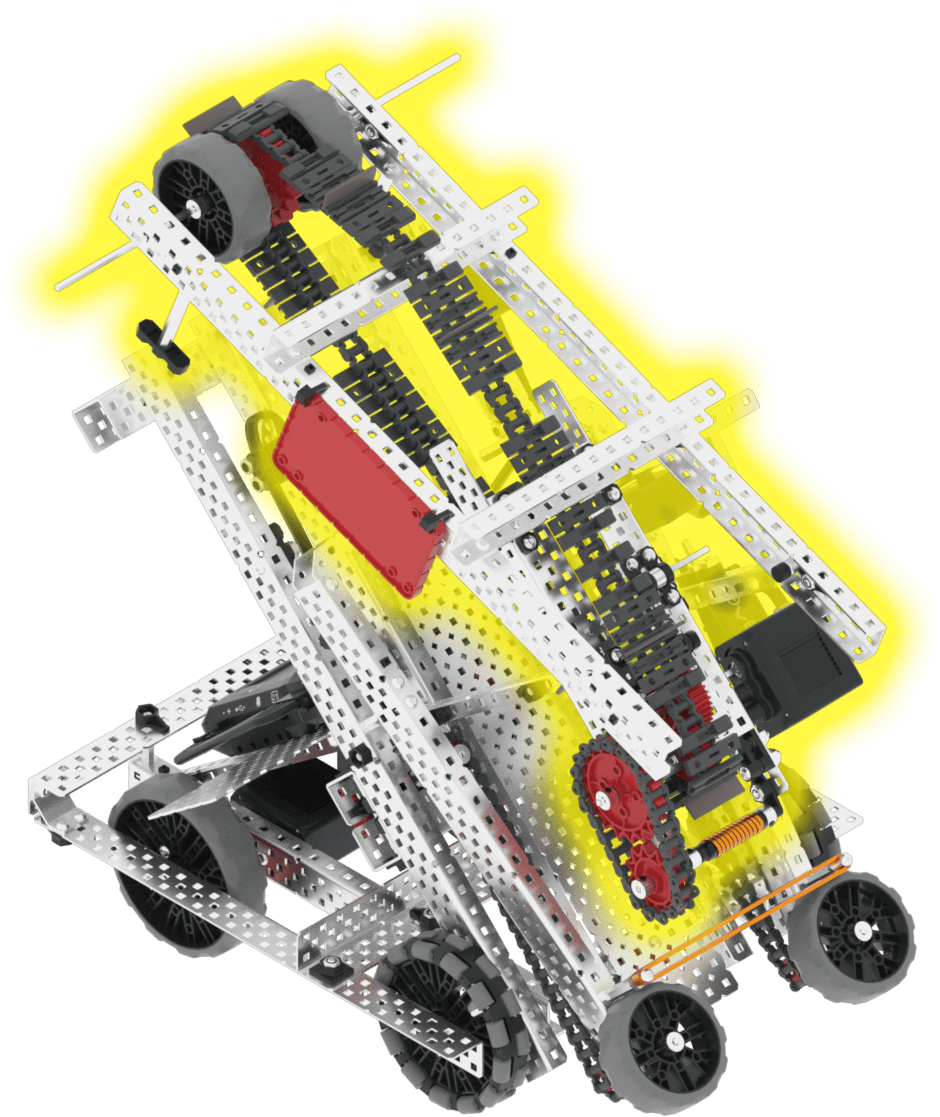
Dex is equipped with two sets of Motor Groups for its Intake and Conveyor.
Configuration & |
Description |
API Documentation |
|---|---|---|
|
The Conveyor Motor moves Blocks from the intake and up to the top of the robot so the Block can be pushed into a goal. |
|
|
The Intake Motor rotates the two wheels at the front of the robot. This allows for Blocks to be picked up off the ground. |
Sensors#
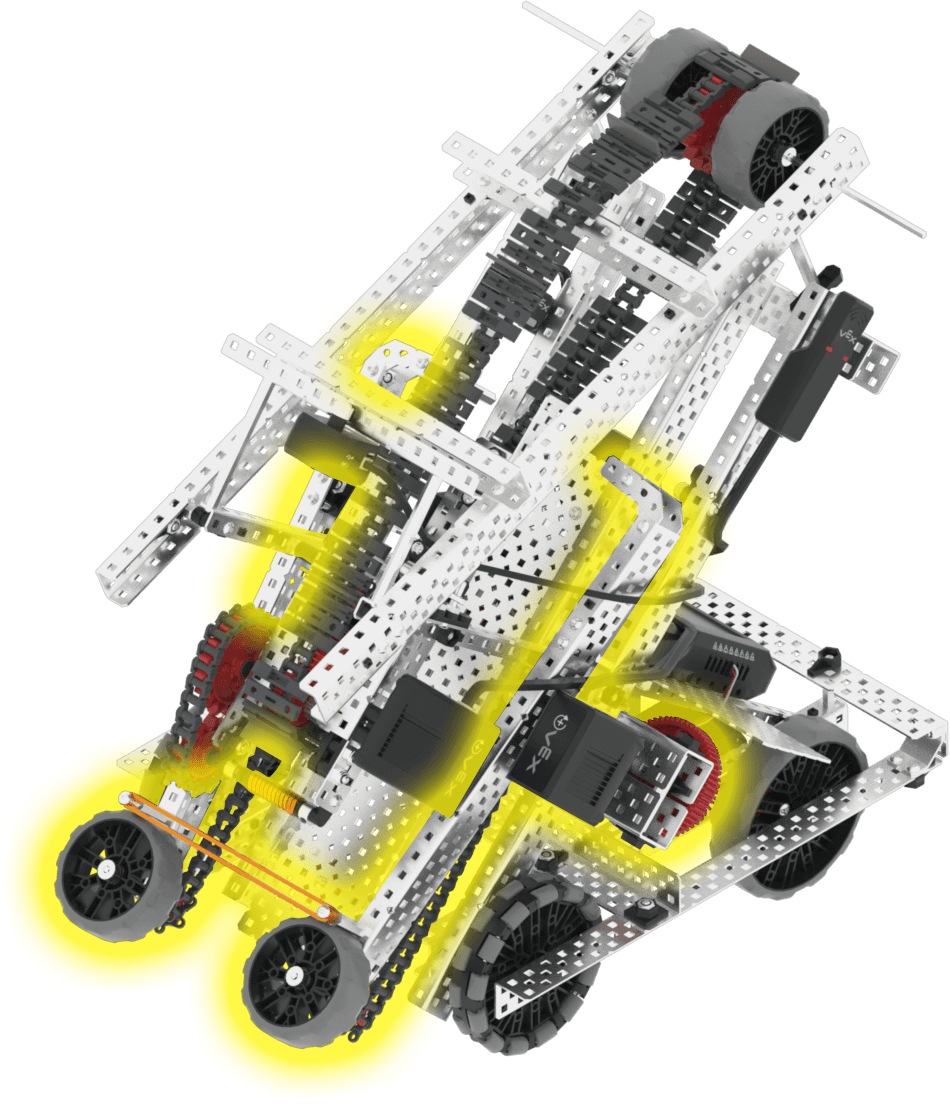
Dex has access to the following sensors for autonomous coding:
Configuration |
Description |
API Documentation |
Python Command Name |
|---|---|---|---|
Brain Timer |
The robot has access to a built-in timer. |
|
|
Inertial |
The robot has access to an Inertial Sensor to track the robot’s current heading and angle of rotation. |
|
|
Motor Encoder |
The robot’s motors have encoders that can track the Conveyor Motor and Intake Motor’s current angle of rotation and position. |
|
|
Distance |
The robot is equipped with a Distance Sensor on its back, enabling it to measure how far it is from the goal when reversing. |
|
|
Optical |
Returns if there is a Block at the top of the robot’s conveyor. This can also determine the color of the object, so the robot can differentiate between Red and Blue blocks. |
|
|
Bumper |
Returns if there is a Block at the bottom of the robot’s conveyor. |
|
|
GPS (Game Positioning System™) |
Reports the current X and Y position of the center of rotation of Dex in millimeters or inches. The GPS Sensor can also report the current heading in degrees. |
|
|
AI Vision Sensor |
A camera that can automatically differentiate between Scoring Elements, allowing the robot to orient itself towards specific Scoring Elements autonomously. |
|