机器人专用积木#
外观#
Robot Looks#
辉光#
Glow 块用于设置 123 机器人中心指示灯的发光颜色。
这是一个非等待块,允许任何后续块无延迟地执行。
发光 [绿色 v]
选择发光的颜色或关闭发光。

在此示例中,123 机器人将发出绿光 3 秒,然后熄灭。
当开始
[Start to glow green.]
发光 [绿色 v]
[Wait 3 seconds.]
等待 (3) 秒
[Stop glowing green.]
发光 [灭 v]
Monitor Looks#
The virtual 123 Robot also has access to all standard VR Looks blocks. Go here to access documentation for the VEXcode VR Looks blocks.
声音#
Play sound#
播放声音块用于播放所选的声音效果。
这是一个非等待块,允许任何后续块无延迟地执行。
播放声音 [鸣笛 v]
选择要播放的音效。
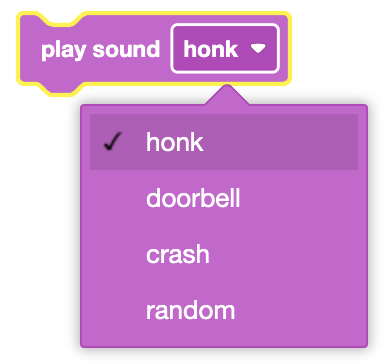
在这个例子中,123机器人将播放门铃声。
当开始
播放声音 [门铃 v]
行动#
Act#
Act 模块用于让 123 机器人执行一系列驱动、转弯和声音行为,以表现出悲伤、快乐或疯狂。
这是一个非等待块,允许任何后续块无延迟地执行。
表现 [难过 v]
选择要表现的情绪。
悲伤:123 机器人将倒车行驶,左转,然后右转,发出“哦哦”的声音,然后向前行驶以模仿悲伤的行为。
快乐:123 机器人将向右旋转 360 度并发出笑声来模仿快乐的行为。
疯狂:123 机器人会向左转一圈,然后向右转一圈,同时播放“循环”声音来模仿疯狂的行为。
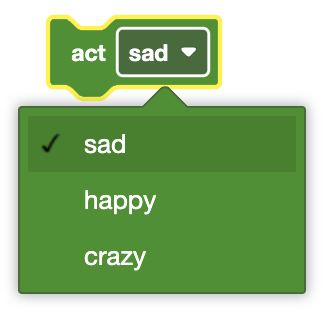
在这个例子中,123机器人会表现得疯狂。
当开始
表现 [crazy v]
传感#
The virtual 123 Robot has access to the standard Brain and Drivetrain Sensing blocks.
Eye Sensing#
找到物体#
发现物体块用于报告前眼传感器是否检测到约 40 毫米 (mm) 或 1.5 英寸范围内的物体。
<辨色仪发现一个对象?>
The Found object block reports True when the Front Eye Sensor detects an object within approximately 40 millimeters (mm) or 1.5 inches.
The Found object block reports False when an object is not within approximately 40 millimeters (mm) or 1.5 inches.
发现物体块用于具有六边形(六面)空间的块中。
在这个例子中,机器人将检查其前眼传感器是否检测到物体,并打印是否检测到任何东西。
当开始
如果 <辨色仪发现一个对象?> 那么
打印 [Eye detects an object!] ▶
结束
打印 [Eye doesn't detect an object!] ▶
检测颜色#
检测颜色块用于报告前眼传感器是否检测到物体的指定颜色。
<辨色仪测得 [红色 v]?>
选择要检测的颜色。
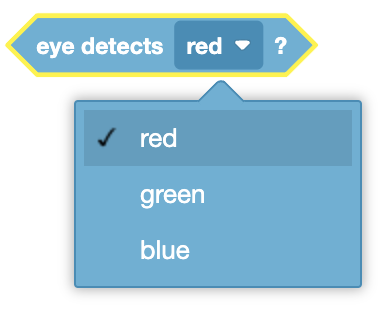
The Detects color block reports True when the Eye Sensor detects the specified color of an object.
The Detects color block reports False when the Eye Sensor does not detect the specified color of an object.
检测颜色块用于具有六边形(六面)空间的块中。
在此示例中,机器人将检查其前眼传感器是否检测到蓝色物体,如果检测到则打印。
当开始
如果 <辨色仪测得 [红色 v]?> 那么
打印 [Eye detects red object!] ▶
结束
色调#
色调块用于报告眼睛传感器检测到的颜色的色调值。
(辨色仪色度值)
色相 模块提供 0 到 359 度之间的色相值。这可以更精确地测量颜色。
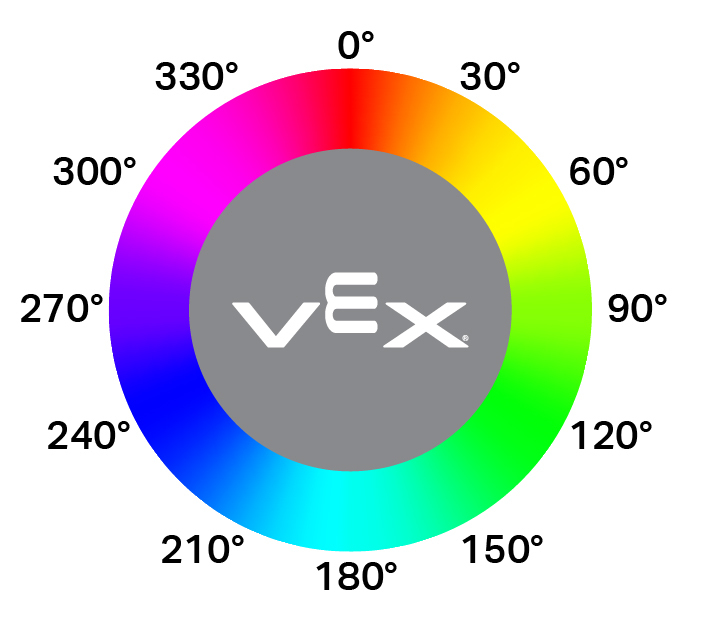
色调块用于具有圆形空间的块中。
在此示例中,机器人将打印物体的当前色调。由于传感器前方没有物体,因此它将打印 0。
当开始
打印 (辨色仪色度值) ▶
眼睛检测到明亮的物体#
眼睛检测明亮物体块用于报告眼睛传感器是否感应到明亮或暗淡的值。
<看到明亮对象?>
The Eye detects bright object block reports True when the Eye Sensor senses a brightness value greater than 70%.
The Eye detects bright object block reports False when the Eye Sensor senses a brightness less than or equal to 70%.
眼睛检测明亮物体块用于具有六边形(六面)空间的块中。
在这个例子中,只有当前方有一个较暗的亮度值(低于70%)时,机器人才会向前行驶。
当开始
[Drive forward indefinitely.]
驱动 [向前 v]
[Wait until the Front Eye Sensor detects a brightness value less than 70%]
等到 <非 <看到明亮对象?>>
[Stop driving.]
驱动停止
亮度#
亮度块用于报告眼睛传感器检测到的物体的亮度。
(辨色仪亮度百分比)
亮度块用于具有圆形空间的块中。
在此示例中,机器人将打印物体的当前亮度。由于传感器前方没有物体,因此它将打印 0。
当开始
打印 (辨色仪亮度百分比) ▶
Gyro Sensing#
检测到碰撞?#
**检测到碰撞?**块用于报告机器人是否与墙壁或其他物体接触。
<检测到碰撞?>
The Detected crash? block reports True if the robot comes in contact with a wall or other object.
The Detected crash? block reports False if the robot does NOT come in contact with a wall or other object.
**检测到碰撞?**块用于具有六边形(六面)空间的块中。
在这个例子中,机器人将向前行驶直到发生碰撞,然后停止移动。
当开始
[Drive forward indefinitely.]
驱动 [向前 v]
[Wait until the robot has driven into something.]
等到 <检测到碰撞?>
[Stop driving.]
驱动停止