Bloques específicos del robot#
Aspecto#
Robot Looks#
Brillo#
El bloque Glow se utiliza para establecer el color del brillo de la luz indicadora en el centro del Robot 123.
Este es un bloque sin espera y permite que cualquier bloque posterior se ejecute sin demora.
resplandor [verde v]
Seleccione el color que desea que brille o apague el brillo.

En este ejemplo, el robot 123 brillará en verde durante 3 segundos antes de que el brillo se apague.
cuando empezó
[Start to glow green.]
resplandor [verde v]
[Wait 3 seconds.]
esperar (3) segundos
[Stop glowing green.]
resplandor [apagado v]
Monitor Looks#
The virtual 123 Robot also has access to all standard VR Looks blocks. Go here to access documentation for the VEXcode VR Looks blocks.
Sonido#
Play sound#
El bloque Reproducir sonido se utiliza para reproducir el efecto de sonido seleccionado.
Este es un bloque sin espera y permite que cualquier bloque posterior se ejecute sin demora.
reproducir sonido [bocinazo v]
Seleccione qué efecto de sonido desea reproducir.
En este ejemplo, el robot 123 reproducirá un sonido de timbre.
cuando empezó
reproducir sonido [timbre de la puerta v]
Comportamiento#
Act#
El bloque Actuar se utiliza para actuar triste, feliz o loco haciendo que el Robot 123 realice una secuencia de comportamientos de conducción, giro y sonido.
Este es un bloque sin espera y permite que cualquier bloque posterior se ejecute sin demora.
acto [triste v]
Selecciona qué emoción deseas realizar.
Triste: El robot 123 conducirá en reversa, girará a la izquierda, luego a la derecha, emitirá un sonido “uh oh” y luego conducirá hacia adelante para imitar un comportamiento triste.
Feliz: El robot 123 girará 360 grados a la derecha y reproducirá un sonido de risa para imitar un comportamiento feliz.
Loco: El robot 123 girará a la izquierda en un círculo, y luego girará a la derecha en un círculo, todo mientras reproduce un sonido “loco” para imitar un comportamiento loco.
En este ejemplo, el robot 123 actuará de forma loca.
cuando empezó
acto [crazy v]
Detección#
The virtual 123 Robot has access to the standard Brain and Drivetrain Sensing blocks.
Eye Sensing#
Objeto encontrado#
El bloque Objeto encontrado se utiliza para informar si el sensor ocular frontal detecta un objeto dentro de aproximadamente 40 milímetros (mm) o 1,5 pulgadas.
<¿El ojo encontró un objeto?>
The Found object block reports True when the Front Eye Sensor detects an object within approximately 40 millimeters (mm) or 1.5 inches.
The Found object block reports False when an object is not within approximately 40 millimeters (mm) or 1.5 inches.
El bloque Objeto encontrado se utiliza en bloques con espacios hexagonales (de seis lados).
En este ejemplo, el robot comprobará si su sensor ocular frontal ha detectado un objeto e imprimirá si ha detectado algo o no.
cuando empezó
si <¿El ojo encontró un objeto?> entonces
imprimir [Eye detects an object!] ▶
fin
imprimir [Eye doesn't detect an object!] ▶
Detecta el color#
El bloque Detecta color se utiliza para informar si el sensor ocular frontal detecta el color especificado de un objeto.
<¿El ojo detecta [rojo v]?>
Seleccione qué color desea detectar.
The Detects color block reports True when the Eye Sensor detects the specified color of an object.
The Detects color block reports False when the Eye Sensor does not detect the specified color of an object.
El bloque Detecta color se utiliza en bloques con espacios hexagonales (de seis lados).
En este ejemplo, el robot comprobará si su sensor ocular frontal ha detectado un objeto azul e imprimirá si lo ha detectado.
cuando empezó
si <¿El ojo detecta [rojo v]?> entonces
imprimir [Eye detects red object!] ▶
fin
Tono de#
El bloque Tono de se utiliza para informar el valor del tono del color detectado por el sensor ocular.
(tono de ojos en grados)
El bloque Tono de proporciona un valor de tono entre 0 y 359 grados. Esto proporciona una medición más precisa del color.
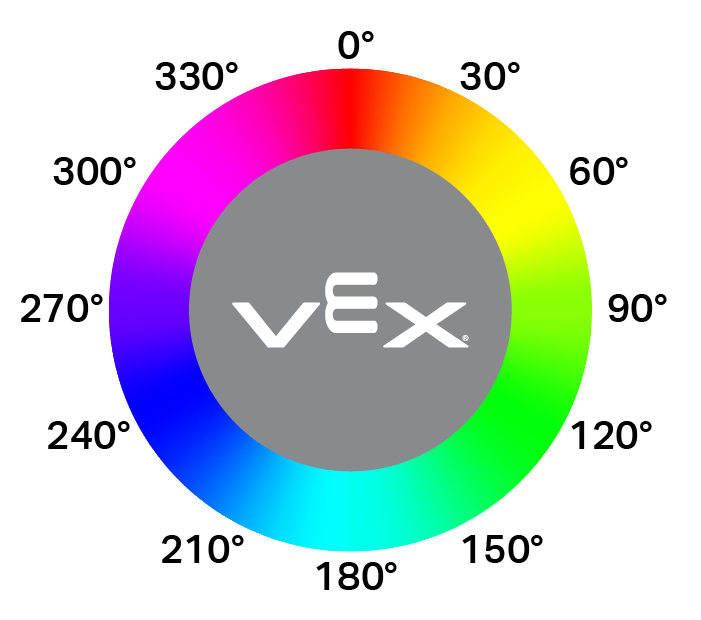
El bloque Tono de se utiliza en bloques con espacios circulares.
En este ejemplo, el robot imprimirá el tono actual de un objeto. Como no hay ningún objeto delante del sensor, imprimirá un 0.
cuando empezó
imprimir (tono de ojos en grados) ▶
El ojo detecta un objeto brillante#
El bloque El ojo detecta un objeto brillante se utiliza para informar si el sensor ocular detecta un valor brillante u oscuro.
<¿ojo objeto brillante?>
The Eye detects bright object block reports True when the Eye Sensor senses a brightness value greater than 70%.
The Eye detects bright object block reports False when the Eye Sensor senses a brightness less than or equal to 70%.
El bloque El ojo detecta un objeto brillante se utiliza en bloques con espacios hexagonales (de seis lados).
En este ejemplo, el robot solo avanzará cuando haya un valor de brillo oscuro (por debajo del 70%) frente a él.
cuando empezó
[Drive forward indefinitely.]
unidad [adelante v]
[Wait until the Front Eye Sensor detects a brightness value less than 70%]
esperar hasta <no <¿ojo objeto brillante?>>
[Stop driving.]
deja de conducir
Brillo de#
El bloque Brillo de se utiliza para informar el brillo del objeto detectado por el sensor ocular.
(brillo ocular en %)
El bloque Brillo de se utiliza en bloques con espacios circulares.
En este ejemplo, el robot imprimirá el brillo actual de un objeto. Como no hay ningún objeto delante del sensor, imprimirá un 0.
cuando empezó
imprimir (brillo ocular en %) ▶
Gyro Sensing#
¿Se detectó un fallo?#
El bloque ¿Accidente detectado? se utiliza para informar si el robot ha entrado en contacto con una pared u otro objeto.
<¿Se detectó un accidente?>
The Detected crash? block reports True if the robot comes in contact with a wall or other object.
The Detected crash? block reports False if the robot does NOT come in contact with a wall or other object.
El bloque ¿Se detectó un fallo? se utiliza en bloques con espacios hexagonales (de seis lados).
En este ejemplo, el robot avanzará hasta chocar y luego dejará de moverse.
cuando empezó
[Drive forward indefinitely.]
unidad [adelante v]
[Wait until the robot has driven into something.]
esperar hasta <¿Se detectó un accidente?>
[Stop driving.]
deja de conducir