机器人专用积木#
所有标准 VEXcode VR 模块均可用于 VIQRC 虚拟技能 - Pitching In 游乐场。
运动#
这个游乐场的块将可以访问所有运动块的 IntakeMotor、CatapultMotor 和 CatapultTensionMotor 参数。
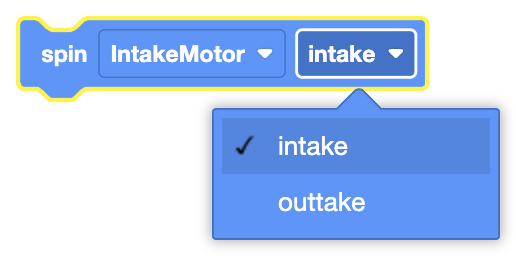
当为运动块选择方向时,intake 将使电机组正向旋转,outtake 将使电机组反向旋转。
Spin#
Spin 块用于无限旋转电机。
这是一个非等待块,允许任何后续块无延迟地执行。
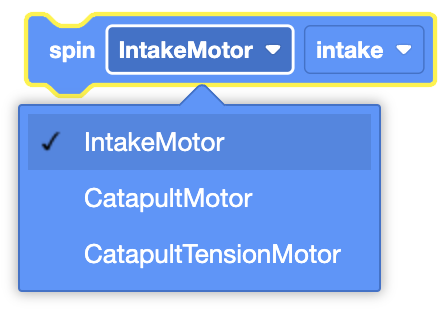
[IntakeMotor v] [收集器 v] 转
选择要使用的电机。
选择电机移动的方向。
在此示例中,进气电机将沿进气方向旋转 1 秒钟,然后停止。
当开始
[Spin Intake Motor in the intake direction indefinitely.]
[IntakeMotor v] [收集器 v] 转
[Wait 1 second.]
等待 (1) 秒
[Stop the Intake Motor from moving.]
[IntakeMotor v] 停止
Spin for#
Spin for 块用于使电机旋转给定的距离。
这可以是非等待或等待块,取决于是否使用并且不等待选项。
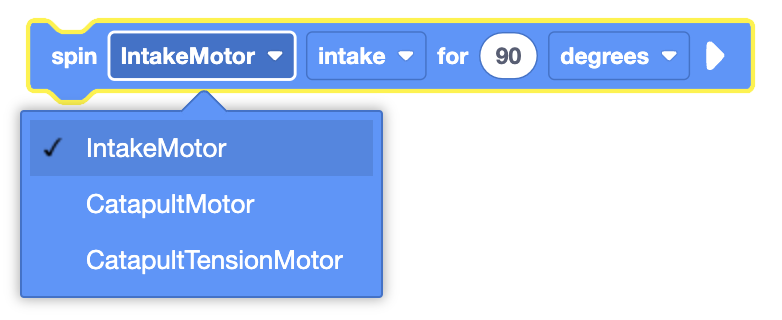
[IntakeMotor v] [收集器 v] 转 [90] [度 v] ▶
选择要使用的电机。
选择电机移动的方向。
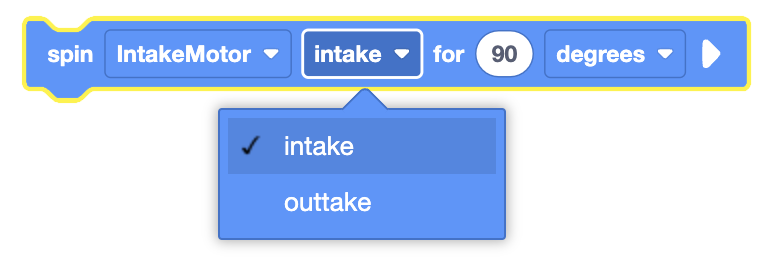
通过输入一个值并选择测量单位(度或圈)来设置电机旋转的距离。
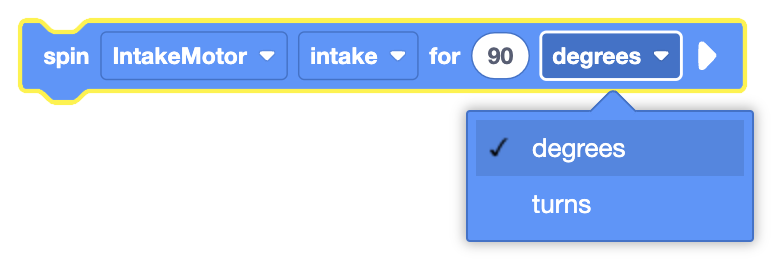
默认情况下,旋转块会阻止任何后续块的执行,直到其完成为止。通过展开旋转块以显示不等待,块将在电机转动时继续执行。
[IntakeMotor v] [收集器 v] 转 [90] [度 v] ◀ 并且不等待
在这个例子中,进气电机将沿进气方向旋转 180 度。
当开始
[IntakeMotor v] [收集器 v] 转 [1] [转 v] ▶
Spin to position#
旋转到位置块用于将电机旋转到设定位置。
这可以是非等待或等待块,取决于是否使用并且不等待选项。
[IntakeMotor v] 转至 [90] [度 v] ▶
选择要使用的电机。
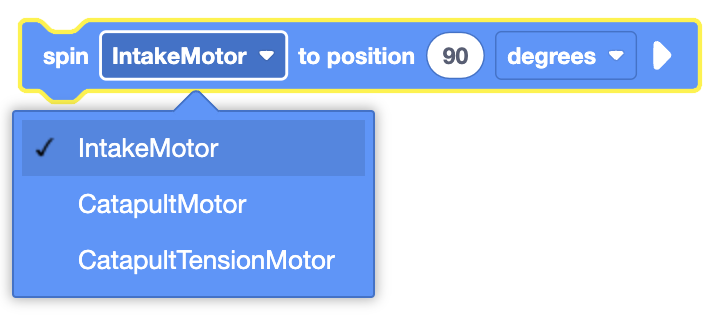
通过输入一个值并选择测量单位(度或圈)来设置电机旋转的距离。
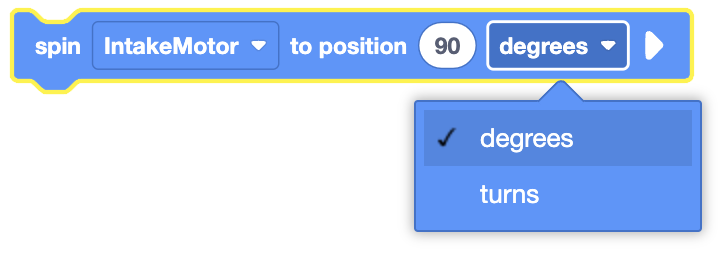
默认情况下,旋转到指定位置积木会阻止所有后续积木的执行,直到其完成。通过展开旋转到指定位置积木以显示不等待,积木将在电机移动时继续执行。
[IntakeMotor v] 转至 [90] [度 v] ◀ 并且不等待
在这个例子中,进气电机将旋转到 180 度的位置。
当开始
[IntakeMotor v] 转至 [180] [度 v] ▶
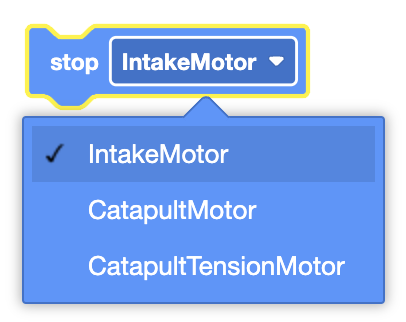
Stop Motor#
停止电机块用于停止电机移动。
这是一个非等待块,允许任何后续块无延迟地执行。
[IntakeMotor v] 停止
选择要使用的电机。
在此示例中,进气电机将沿进气方向旋转 1 秒钟,然后停止。
当开始
[Spin Intake Motor in the intake direction indefinitely.]
[IntakeMotor v] [收集器 v] 转
[Wait 1 second.]
等待 (1) 秒
[Stop the Intake Motor from moving.]
[IntakeMotor v] 停止
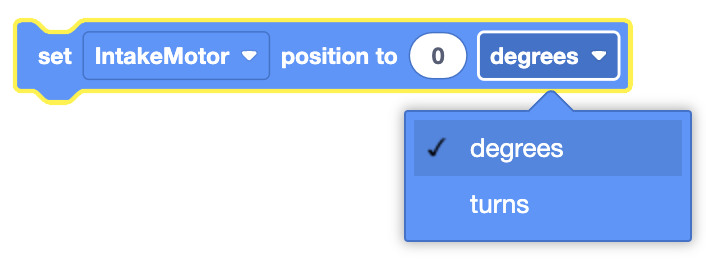
Set Motor position#
设置电机位置块用于将电机的编码器位置设置为输入的值。
这是一个非等待块,允许任何后续块无延迟地执行。
设定 [IntakeMotor v] 转位至 [0] [度 v]
选择要使用的电机。
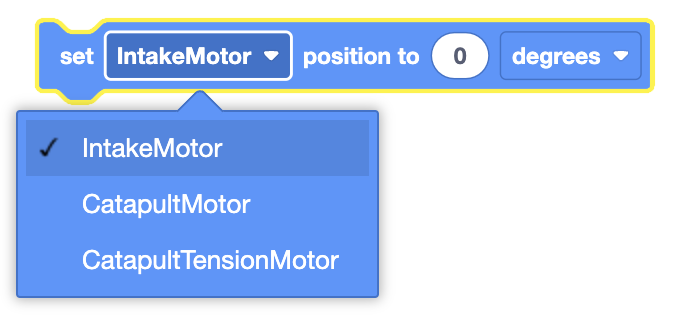
设置要使用的测量单位,度或圈。
在此示例中,电机的编码器位置在电机旋转到 0 度位置之前设置为 90 度。
当开始
[Set current Intake Motor position to 90 degrees.]
设定 [IntakeMotor v] 转位至 [90] [度 v]
[Spin the Intake Motor to the 0 degrees position.]
[IntakeMotor v] 转至 [0] [度 v] ▶
Set Motor velocity#
设置电机速度块用于设置电机的速度。
这是一个非等待块,允许任何后续块无延迟地执行。
设定 [IntakeMotor v] 转速为 [50] [% v]
选择要使用的电机。
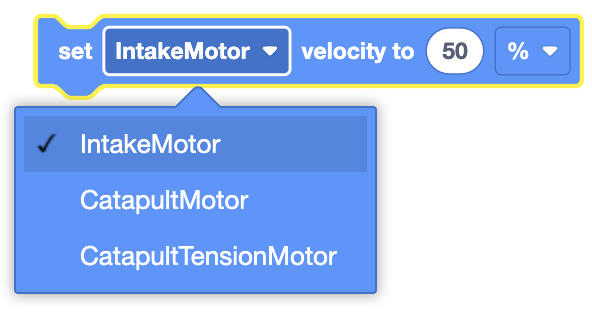
设置电机速度块将接受-100%到100%的范围。
在此示例中,电机的速度设置为 75%,然后沿进气方向旋转 1 圈。
当开始
[Set Catapult Motor velocity to 75%.]
设定 [CatapultMotor v] 转速为 [75] [% v]
[Spin the Catapult Motor to 90 degrees.]
[CatapultMotor v] 转至 [90] [度 v] ▶
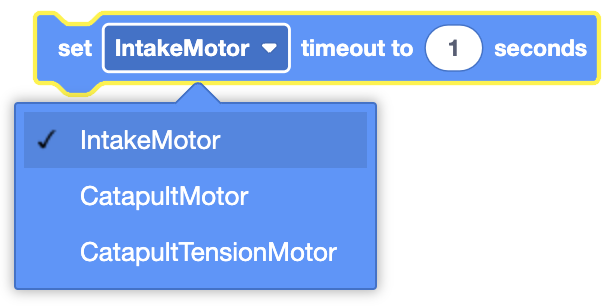
Set Motor timeout#
设置电机超时块用于设置 VEX IQ 电机运动块的时间限制。
这可以防止未到达预定位置的运动块阻止后续块的运行。
这是一个非等待命令,允许任何后续命令无延迟地执行。
设定 [IntakeMotor v] 超时为 [1] 秒
选择要使用的电机。
在此示例中,电机超时设置为 2 秒,然后电机沿出风方向旋转 3 圈。
当开始
[Set the Intake Motor timeout to 2 seconds.]
设定 [IntakeMotor v] 超时为 [2] 秒
[Spin the Intake Motor for 3 turns in the outtake direction.]
[IntakeMotor v] [吐放器 v] 转 [3] [转 v] ▶
传感#
Fling 可以使用标准大脑、传动系统、保险杠、距离感应块。
Motor Sensing#
电机已完成#
电机已完成块用于报告所选电机或电机组是否已完成其运动。
<[IntakeMotor v] 已结束?>
选择要使用的电机或电机组。
The Motor is done block reports True when the selected Motor or Motor Group has completed its movement.
The Motor is done block reports False when the selected Motor or Motor Group has not completed its movement.
电机已完成块用于具有六边形(六面)空间的块中。
示例即将推出
电机旋转#
电机正在旋转块用于报告所选电机或电机组是否正在移动。
<[IntakeMotor v] 正在转?>
选择要使用的电机或电机组。
The Motor is spinning block reports True when the selected Motor or Motor Group is moving.
The Motor is spinning block reports False when the selected Motor or Motor Group is not moving.
马达正在旋转块用于具有六边形(六面)空间的块中。
示例即将推出
电机位置#
电机位置块用于报告电机或电机组中第一个电机的位置。
([IntakeMotor v] 转位 [度 v])
选择要使用的电机或电机组。
选择使用的单位,度或圈。
电机位置块用于具有圆形空间的块中。
示例即将推出
电机转速#
电机速度块用于报告电机或电机组中第一个电机的当前速度。
([IntakeMotor v] 速度 [度 v] 值 :: custom-motion)
选择要使用的电机或电机组。
电机速度块用于具有圆形空间的块中。
示例即将推出
Color Sensing#
物体靠近#
物体在附近块用于报告颜色传感器是否检测到附近的物体。
<[Color v] 发现对象?>
The Object is near block reports True when the Color Sensor detects an object or surface close to the front of the sensor.
The Object is near block reports False when the Color Sensor detects empty space in front of the sensor.
物体在附近块用于具有六边形(六面)空间的块中。
示例即将推出
颜色检测#
颜色检测块用于报告颜色传感器是否检测到附近的物体。
<[Color v] 测得 [红色 v]?>
选择颜色传感器应检测的颜色。
The Color detects block reports True when the Color Sensor detects the selected color.
The Color detects block reports False when the Color Sensor detects a different color than the one selected.
颜色检测块用于具有六边形(六面)空间的块中。
示例即将推出
颜色#
颜色块用于报告颜色传感器检测到的颜色的名称。
([Color v] 颜色)
块的颜色用于具有圆形空间的块中。
示例即将推出
亮度#
亮度块用于报告颜色传感器检测到的光量。
([Color v] 亮度百分比)
亮度块用于具有圆形空间的块中。
示例即将推出
色调#
色调块用于报告颜色传感器检测到的颜色的色调。
色调 报告的范围从 0 到 360。
([Color v] 色调度数)
色调块用于具有圆形空间的块中。
示例即将推出