Bloques específicos del robot#
Introducción#
El patio de juegos VIQRC 25-26 Mix & Match presenta bloques exclusivos para la construcción diseñada para este patio de juegos, incluidas dos opciones de motor, sensor de visión IQ AI, sensor óptico y LED táctil.
Todos los bloques VEXcode VR estándar están disponibles para su uso en el patio de juegos VIQRC 25-26 Mix & Match.
A continuación se muestra una lista de todos los bloques específicos de Playground disponibles:
Movimiento: mueve y rastrea los motores del robot.
Comportamiento
spin – Hace girar el motor o el grupo de motores seleccionado indefinidamente.
girar por – Hace girar un motor o grupo durante una distancia específica en grados o vueltas.
girar a posición – Gira un motor o un grupo de motores a una posición establecida.
detener motor – Detiene el giro de un motor o un grupo de motores específico.
Ajustes
establecer velocidad del motor – Establece la velocidad de un motor o grupo de motores como un porcentaje.
establecer tiempo de espera del motor – Limita el tiempo que un bloque de motor espera antes de darse por vencido si se bloquea el movimiento.
Posición
posición del motor – Devuelve la posición de rotación actual del motor en grados o vueltas.
establecer posición del motor – Establece el valor del codificador de un motor o grupo de motores.
Valores
¿El motor está listo? – Devuelve un valor booleano que indica si el motor ya no está girando.
¿El motor está girando? – Devuelve un valor booleano que indica si el motor está girando actualmente.
velocidad del motor – Devuelve la velocidad actual del motor en %.
AI Vision: capture y analice objetos utilizando el sensor IQ AI Vision.
Comportamiento
obtener datos de objeto – Captura datos para un tipo de objeto específico, como colores, objetos entrenados previamente o AprilTags.
Ajustes
establecer elemento de objeto – Selecciona un objeto específico de la lista.
Valores
¿Existe el objeto? – Devuelve si se detectó alguna clasificación.
número de objetos – Devuelve cuántos objetos se detectaron.
propiedad del objeto – Devuelve detalles como:
La clasificación de IA es – Devuelve si se detecta una clasificación específica.
Detección: utilice los distintos sensores del robot.
Óptico
¿Objeto óptico encontrado? – Devuelve si se detectó un objeto.
¿Ópticamente detecta color? – Devuelve si se detecta un color específico.
Brillo óptico – Devuelve el porcentaje de brillo detectado por el sensor.
Tono óptico – Devuelve el valor de tono del color detectado.
cuando es óptico – Ejecuta la pila de bloques adjunta cuando el sensor óptico detecta o pierde un objeto.
LED táctil
Establecer color TouchLED – Establece el TouchLED en un color seleccionado.
Movimiento#
Actions#
girar#
El bloque spin hace girar un motor o un grupo de motores seleccionado en una dirección específica utilizando la velocidad actual del motor.
girar [ClawMotor v] [abierto v]
Parámetros |
Descripción |
|---|---|
motor |
El motor o grupo de motores a girar:
|
dirección |
La dirección para girar:
|
Ejemplo
cuando empezó
[Place a pin atop another pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
girar para#
El bloque girar para hace girar un motor o un grupo de motores seleccionado durante una cantidad específica de rotación usando la velocidad actual del motor, medida en grados o vueltas.
girar [ClawMotor v] [abierto v] por (90) [grados v] ▶
Parámetros |
Descripción |
|---|---|
motor |
El motor o grupo de motores a girar:
|
dirección |
La dirección para girar:
|
distancia |
La cantidad de rotación, como número entero o decimal. |
unidad |
La unidad de medida que representa la distancia:
|
flecha expansiva |
Por defecto, este es un bloque de espera, por lo que el motor terminará de moverse antes de ejecutar el siguiente bloque. Para que el motor comience a moverse e inmediatamente ejecute el siguiente bloque, expanda el bloque para indicar y no espere. |
Ejemplo
cuando empezó
[Place a pin atop another pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
girar a la posición#
El bloque girar a posición hace girar un motor o un grupo de motores a una posición absoluta específica utilizando la velocidad del motor y la posición del motor actuales.
girar [ClawMotor v] a la posición (90) [grados v] ▶
Parámetros |
Descripción |
|---|---|
motor |
El motor o grupo de motores a girar:
|
posición |
La posición de destino a la que se debe girar el motor o el grupo de motores. |
unidad |
La unidad de medida:
|
flecha expansiva |
Por defecto, este es un bloque de espera, por lo que el motor terminará de moverse antes de ejecutar el siguiente bloque. Para que el motor comience a moverse e inmediatamente ejecute el siguiente bloque, expanda el bloque para indicar y no espere. |
Ejemplo
cuando empezó
[Place a pin atop another pin.]
girar [LiftMotor v] a la posición [-2] [giros v] ▶
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
detener el motor#
El bloque detener motor detiene inmediatamente el motor o el grupo de motores seleccionado.
parada [ClawMotor v]
Parámetros |
Descripción |
|---|---|
motor |
El motor o grupo de motores a detener:
|
Ejemplo
cuando empezó
[Place a pin atop another pin.]
girar [LiftMotor v] [arriba v]
esperar [2] segundos
parada [LiftMotor v]
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
Settings#
establecer la velocidad del motor#
El bloque establecer velocidad del motor establece la velocidad de giro predeterminada de un motor o grupo de motores como un porcentaje para todos los bloques de motor posteriores en el proyecto.
Establezca la velocidad [ClawMotor v] en (50) [% v]
Parámetros |
Descripción |
|---|---|
motor |
El motor o grupo de motores para establecer la velocidad de:
|
velocidad |
Establece la velocidad de movimiento predeterminada de 0 a 100 como porcentaje. |
unidad |
La unidad que representa la velocidad:
|
Ejemplo
cuando empezó
[Place a pin atop another pin.]
Establezca la velocidad [LiftMotor v] en [100] [% v]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
establecer el tiempo de espera del motor#
El bloque establecer tiempo de espera del motor establece un límite de tiempo que un bloque de motor esperará para alcanzar su objetivo. Si el robot no puede completar el movimiento dentro del tiempo establecido, se detendrá automáticamente y continuará con el siguiente bloque.
Nota: El límite de tiempo del motor se utiliza para evitar que los bloques del motor que no alcanzan su posición objetivo detengan la ejecución de otros bloques en la pila.
Establezca el tiempo de espera [ClawMotor v] en (1) segundo
Parámetros |
Descripción |
|---|---|
motor |
El motor o grupo de motores para configurar el tiempo de espera:
|
tiempo |
La cantidad máxima de segundos que un bloque de motor funcionará antes de detenerse y pasar al siguiente bloque. |
Ejemplo
cuando empezó
[Place a pin atop another pin.]
Establezca el tiempo de espera [LiftMotor v] en [2] segundo
girar [LiftMotor v] [arriba v] por [5] [giros v] ▶
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
Position#
posición del motor#
El bloque posición del motor devuelve la distancia total que ha girado el motor o el grupo de motores seleccionado.
([ClawMotor v] posición en [grados v])
Parámetros |
Descripción |
|---|---|
motor |
El motor o grupo de motores para devolver la posición de:
|
unidad |
La unidad de medida:
|
Ejemplo
cuando empezó
[Place a pin atop another pin.]
girar [LiftMotor v] [arriba v]
esperar hasta <[-600] [math_greater_than v] ([LiftMotor v] posición en [grados v])>
parada [LiftMotor v]
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
establecer la posición del motor#
El bloque establecer posición del motor establece un valor de posición específico para un motor o grupo de motores, que actualiza la lectura del codificador.
Establezca la posición [ClawMotor v] en (0) [grados v]
Parámetros |
Descripción |
|---|---|
motor |
El motor o grupo de motores para establecer la posición de:
|
posición |
El valor de posición del codificador a establecer. |
unidad |
La unidad de medida:
|
Ejemplo
cuando empezó
[Place a pin atop another pin.]
Establezca la posición [LiftMotor v] a [100] grado
girar [LiftMotor v] a la posición [-500] [grados v] ▶
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
Values#
El motor está listo#
El bloque ¿El motor está listo? devuelve un valor booleano que indica si el motor o el grupo de motores no está girando.
Verdadero – El motor no gira.
Falso – El motor está girando.
<[ClawMotor v] ¿está hecho?>
Parámetros |
Descripción |
|---|---|
motor |
El motor o grupo de motores para comprobar si ha terminado de girar:
|
Ejemplo
cuando empezó
[Place a pin atop another pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ◀ y no esperes
esperar [0.1] segundos
repetir hasta <[LiftMotor v] ¿está hecho?>
establecer el color [TouchLED v] en [rojo v]
esperar [0.5] segundos
establecer el color [TouchLED v] en [rojo v]
esperar [0.5] segundos
fin
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
¿El motor está girando?#
El bloque ¿el motor está girando? devuelve un valor booleano que indica si el motor está girando.
Verdadero – El motor está girando.
Falso – El motor no gira.
<[ClawMotor v] esta girando?>
Parámetros |
Descripción |
|---|---|
motor |
El motor o grupo de motores para comprobar si está girando actualmente:
|
Ejemplo
cuando empezó
[Place a pin atop another pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ◀ y no esperes
esperar [0.1] segundos
mientras <[LiftMotor v] esta girando?>
establecer el color [TouchLED v] en [rojo v]
esperar [0.5] segundos
establecer el color [TouchLED v] en [rojo v]
esperar [0.5] segundos
fin
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
velocidad del motor#
El bloque velocidad del motor devuelve la velocidad de rotación actual del motor o grupo de motores en un rango de -100% a 100%.
([ClawMotor v] velocidad en [% v] :: custom-motion)
Parámetros |
Descripción |
|---|---|
motor |
El motor o grupo de motores para devolver la velocidad de:
|
unidad |
La unidad que representa la velocidad:
|
Ejemplo
cuando empezó
[Place a pin atop another pin.]
Establezca la velocidad [LiftMotor v] en [100] [% v]
girar [LiftMotor v] [arriba v] por [600] [grados v] ◀ y no esperes
esperar [0.5] segundos
imprimir ([LiftMotor v] velocidad en [% v] :: custom-motion) ▶
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
Visión de IA#
Actions#
obtener datos del objeto#
El bloque obtener datos del objeto filtra los datos del marco del sensor de visión IQ AI. Este sensor puede detectar elementos del juego en el campo.
El conjunto de datos almacena objetos ordenados de mayor a menor por ancho, comenzando en el índice 0. Se puede acceder a las propiedades de cada objeto mediante el bloque AI Vision object property. Si no se detectan objetos coincidentes, se devuelve un conjunto de datos vacío.
obtener [AI Classifications v] datos de [AIVision v]
Parámetro |
Descripción |
|---|---|
firma |
Filtra el conjunto de datos para incluir solo datos de la firma dada. La única firma disponible es:
|
Ejemplo
cuando empezó
[Place the Red Pin on the top left Blue Pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
girar [izquierda v] por [38] grado ▶
repetir hasta <([AIVision v] objeto [amplitud v]) [math_greater_than v] [48]>
[Move forward until the robot is close to the Pin.]
obtener [AI Classifications v] datos de [AIVision v]
unidad [adelante v]
fin
unidad [adelante v] para [160] [mm v] ▶
girar [ClawMotor v] [abierto v]
Settings#
elemento de objeto establecido#
El bloque establecer objeto de elemento establece qué elemento del conjunto de datos utilizar.
Establecer el elemento de objeto [AIVision v] en [1]
Parámetros |
Descripción |
|---|---|
artículo |
El número del elemento en el conjunto de datos a utilizar. |
Ejemplo
cuando empezó
[Find the object index of the nearest Orange Pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
establecer de [object_counter v] a [1]
obtener [AI Classifications v] datos de [AIVision v]
[Iterate through all detected objects.]
repetir ([AIVision v] recuento de objetos)
Establecer el elemento de objeto [AIVision v] en (object_counter)
si <[AIVision v] object is [Orange Pin v] ?> entonces
imprimir (unirse [Nearest Orange Pin is ] (object_counter)) ▶
demás
cambiar [object_counter v] por [1]
Values#
¿Existe el objeto?#
El bloque ¿existe el objeto? devuelve un valor booleano que indica si se detecta algún objeto en el conjunto de datos.
Verdadero: el conjunto de datos incluye un objeto detectado.
Falso: el conjunto de datos no incluye ningún objeto detectado.
<¿Existe el objeto AI Vision?>
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Raise the Lift until a Pin or Beam is detected.]
repetir hasta <¿Existe [AIVision v] objeto?>
obtener [AI Classifications v] datos de [AIVision v]
girar [LiftMotor v] [arriba v]
fin
parada [LiftMotor v]
recuento de objetos#
El bloque conteo de objetos devuelve la cantidad de objetos detectados en el conjunto de datos como un entero.
([AIVision v] recuento de objetos)
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Find the object index of the nearest Orange Pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
establecer de [object_counter v] a [1]
obtener [AI Classifications v] datos de [AIVision v]
[Iterate through all detected objects.]
repetir ([AIVision v] recuento de objetos)
Establecer el elemento de objeto [AIVision v] en (object_counter)
si <[AIVision v] object is [Orange Pin v] ?> entonces
imprimir (unirse [Nearest Orange Pin is ] (object_counter)) ▶
demás
cambiar [object_counter v] por [1]
propiedad del objeto#
Hay seis propiedades que se incluyen con cada objeto (que se muestra a continuación) almacenado después de que se utiliza el bloque obtener datos del objeto.
([AIVision v] objeto [amplitud v])
Algunos valores de propiedad se basan en la posición del objeto detectado en la vista del sensor de visión IQ AI al momento de usar el bloque obtener datos del objeto. El sensor de visión IQ AI tiene una resolución de 320 x 240 píxeles.
Parámetro |
Descripción |
|---|---|
propiedad |
¿Qué propiedad del objeto detectado utilizar? |
ancho#
width devuelve el ancho del objeto detectado en píxeles como un entero de 1 a 320.
([AIVision v] objeto [amplitud v])
Ejemplo
cuando empezó
[Place the Red Pin on the top left Blue Pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
girar [izquierda v] por [38] grado ▶
repetir hasta <([AIVision v] objeto [amplitud v]) [math_greater_than v] [48]>
[Move forward until the robot is close to the Pin.]
obtener [AI Classifications v] datos de [AIVision v]
unidad [adelante v]
fin
unidad [adelante v] para [160] [mm v] ▶
girar [ClawMotor v] [abierto v]
altura#
altura devuelve la altura del objeto detectado en píxeles como un entero de 1 a 240.
([AIVision v] objeto [altura v])
Ejemplo
cuando empezó
[Place the Red Pin on the top left Blue Pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
girar [izquierda v] por [38] grado ▶
repetir hasta <([AIVision v] objeto [altura v]) [math_greater_than v] [68]>
[Move forward until the robot is close to the Pin.]
obtener [AI Classifications v] datos de [AIVision v]
unidad [adelante v]
fin
unidad [adelante v] para [160] [mm v] ▶
girar [ClawMotor v] [abierto v]
centroX#
centerX devuelve la coordenada x del centro del objeto detectado en píxeles como un entero de 0 a 320.
([AIVision v] objeto [centroX v])
Ejemplo
cuando empezó
[Place the Red Pin on the bottom left Blue Pin.]
unidad [adelante v] para [50] [mm v] ▶
girar [LiftMotor v] [arriba v] por [450] [grados v] ▶
establecer la velocidad de giro a [10] [% v]
obtener [AI Classifications v] datos de [AIVision v]
repetir hasta <([AIVision v] objeto [centroX v]) [math_less_than v] [190]>
[Turn until the robot is centered on the Blue Pin.]
obtener [AI Classifications v] datos de [AIVision v]
turno [derecha v]
fin
unidad [adelante v] para [350] [mm v] ▶
girar [ClawMotor v] [abierto v]
centroY#
centerY devuelve la coordenada y del centro del objeto detectado en píxeles como un entero de 0 a 240.
([AIVision v] objeto [centroY v])
Ejemplo
cuando empezó
[Place the Red Pin on the top left Blue Pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
girar [izquierda v] por [38] grado ▶
repetir hasta <([AIVision v] objeto [centroY v]) [math_greater_than v] [210]>
[Move forward until the robot is close to the Pin.]
obtener [AI Classifications v] datos de [AIVision v]
unidad [adelante v]
fin
unidad [adelante v] para [160] [mm v] ▶
girar [ClawMotor v] [abierto v]
origenX#
originX devuelve la coordenada x de la esquina superior izquierda del cuadro delimitador del objeto detectado en píxeles como un número entero de 0 a 320.
([AIVision v] objeto [origenX v])
Ejemplo
cuando empezó
[Place the Red Pin on the bottom left Blue Pin.]
unidad [adelante v] para [50] [mm v] ▶
girar [LiftMotor v] [arriba v] por [450] [grados v] ▶
establecer la velocidad de giro a [10] [% v]
obtener [AI Classifications v] datos de [AIVision v]
repetir hasta <([AIVision v] objeto [centroX v]) [math_less_than v] [160]>
[Turn until the robot is centered on the Blue Pin.]
obtener [AI Classifications v] datos de [AIVision v]
turno [derecha v]
fin
unidad [adelante v] para [350] [mm v] ▶
girar [ClawMotor v] [abierto v]
origenY#
originY devuelve la coordenada y de la esquina superior izquierda del cuadro delimitador del objeto detectado en píxeles como un entero de 0 a 240.
([AIVision v] objeto [origenY v])
Ejemplo
cuando empezó
[Place the Red Pin on the top left Blue Pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
girar [izquierda v] por [38] grado ▶
repetir hasta <([AIVision v] objeto [origenY v]) [math_greater_than v] [180]>
[Move forward until the robot is close to the Pin.]
obtener [AI Classifications v] datos de [AIVision v]
unidad [adelante v]
fin
unidad [adelante v] para [160] [mm v] ▶
girar [ClawMotor v] [abierto v]
La clasificación de IA es#
El bloque ¿El objeto AI Vision es? devuelve un valor booleano que indica si un objeto detectado coincide con una clasificación específica.
Verdadero: el elemento del conjunto de datos es el objeto específico.
Falso: el elemento del conjunto de datos no es el objeto específico.
<[AIVision] object is [Beam v]?>
Parámetro |
Descripción |
|---|---|
objeto |
¿Con qué objeto comparar el artículo?
|
Ejemplo
cuando empezó
[Find the object index of the nearest Orange Pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
establecer de [object_counter v] a [1]
obtener [AI Classifications v] datos de [AIVision v]
[Iterate through all detected objects.]
repetir ([AIVision v] recuento de objetos)
Establecer el elemento de objeto [AIVision v] en (object_counter)
si <[AIVision v] object is [Orange Pin v] ?> entonces
imprimir (unirse [Nearest Orange Pin is ] (object_counter)) ▶
demás
cambiar [object_counter v] por [1]
Detección#
Optical#
¿Objeto óptico encontrado?#
El bloque ¿Objeto óptico encontrado? devuelve un valor booleano que indica si el sensor óptico ha detectado un objeto.
Verdadero: el sensor óptico ha detectado un objeto.
Falso: el sensor óptico no ha detectado un objeto.
<[Optical v] Encontraste un objeto?>
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Place a pin atop another pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
esperar hasta <no <[Optical v] Encontraste un objeto?>>
girar [LiftMotor v] a la posición [0] [grados v] ▶
¿La tecnología óptica detecta el color?#
El bloque ¿El sensor óptico detecta color? devuelve un valor booleano que indica si el sensor óptico ha detectado un color específico.
Verdadero: el sensor óptico ha detectado el color especificado.
Falso: el sensor óptico no ha detectado el color especificado.
<[Optical v] detecta [rojo v]?>
Parámetros |
Descripción |
|---|---|
color |
¿Qué color buscar?:
|
Ejemplo
cuando empezó
[Place a pin atop another pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
esperar hasta <no <[Optical v] detecta [rojo v]?>>
girar [LiftMotor v] a la posición [0] [grados v] ▶
Brillo óptico#
El bloque Brillo óptico devuelve la cantidad de luz detectada por el sensor óptico en un rango de 0% a 100%.
([Optical v] brillo en %)
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Place a pin atop another pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
esperar hasta <[30] [math_greater_than v] ([Optical v] brillo en %)>
girar [LiftMotor v] a la posición [0] [grados v] ▶
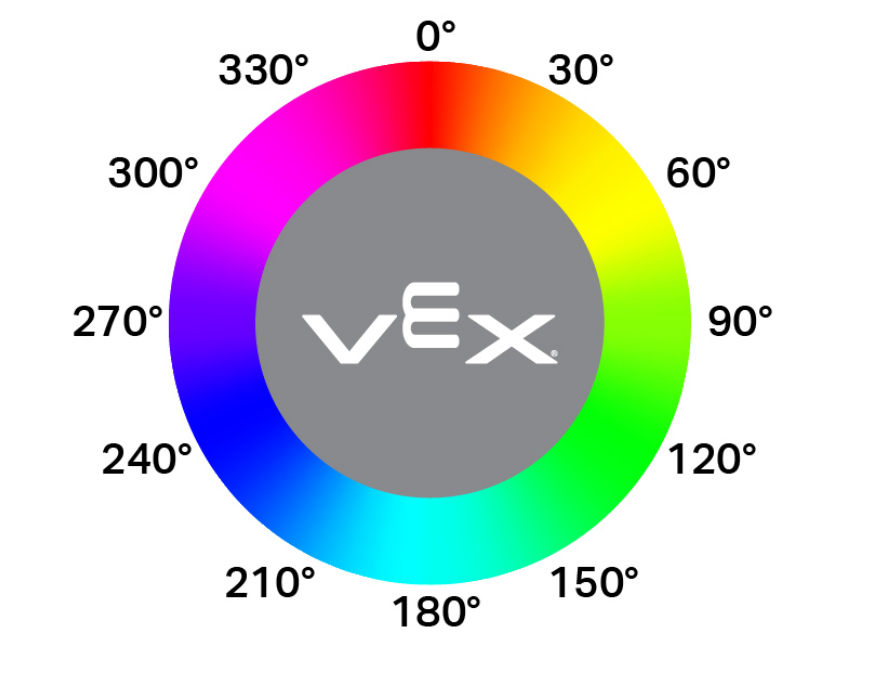
Tono óptico#
El bloque Tono óptico devuelve el valor de tono del color detectado por el sensor óptico.
Los valores de tono varían de 0 a 359 grados, correspondientes a las posiciones en la rueda de color que se muestran a continuación.
([Optical v] tono en grados)
Parámetros |
Descripción |
|---|---|
Este bloque no tiene parámetros. |
Ejemplo
cuando empezó
[Place a pin atop another pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
esperar hasta <([Optical v] tono en grados) [math_greater_than v] [0]>
girar [LiftMotor v] a la posición [0] [grados v] ▶
Cuando óptico#
El bloque cuando es óptico ejecuta su pila cuando el sensor óptico detecta o pierde un objeto. Puedes tener varios bloques cuando es óptico para ejecutar varias pilas de bloques a la vez.
cuando [Optical v] [detects v] un objeto
Parámetros |
Descripción |
|---|---|
acción |
¿Qué acción para activar el bloqueo del sombrero?:
|
Ejemplo
cuando empezó
[Place a pin atop another pin.]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
cuando [Optical v] [loses v] un objeto
[Lower the lift when the red pin is not in the claw.]
girar [LiftMotor v] a la posición [0] [grados v] ▶
Touch LED#
Establecer el color del TouchLED#
El bloque establecer color de TouchLED establece el color del LED táctil.
establecer el color [TouchLED v] en [none v]
Parámetros |
Descripción |
|---|---|
color |
Establece el color del LED en:
|
Ejemplo
cuando empezó
[Place a pin atop another pin.]
establecer el color [TouchLED v] en [rojo v]
girar [LiftMotor v] [arriba v] por [600] [grados v] ▶
unidad [adelante v] para (140) [mm v] ▶
girar [ClawMotor v] [abierto v]
establecer el color [TouchLED v] en [none v]